You might also like
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- AC Mot 1Document25 pagesAC Mot 1Syed MamnoonNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- History: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionDocument8 pagesHistory: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionegyptonNo ratings yet
- Electrical Science-2: Term Paper of Ele102Document7 pagesElectrical Science-2: Term Paper of Ele102shailesh singhNo ratings yet
- CH 5 6 7Document54 pagesCH 5 6 7Usman0% (1)
- Induction Motor (ALL TOPICS)Document33 pagesInduction Motor (ALL TOPICS)Ramprakash89% (18)
- Guide To Motor & StartingDocument26 pagesGuide To Motor & Startingnooruddinkhan1100% (2)
- MotorsDocument10 pagesMotorskumiho_warriorNo ratings yet
- PDA College of Engineering: Induction MotorDocument14 pagesPDA College of Engineering: Induction MotorneelimaNo ratings yet
- St. Joseph’s College of Engineering - Synchronous Reluctance Motors Questions BankDocument20 pagesSt. Joseph’s College of Engineering - Synchronous Reluctance Motors Questions Bankkrish_skumar6302No ratings yet
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- Induction Motor Working Principle Types PDFDocument6 pagesInduction Motor Working Principle Types PDFdumpyNo ratings yet
- Induction Motor: Working Principle, Types, &Document6 pagesInduction Motor: Working Principle, Types, &0409piyushNo ratings yet
- TP2-Satya PrakashDocument13 pagesTP2-Satya Prakashm_azhagarNo ratings yet
- Slip Ring Induction MotorsDocument9 pagesSlip Ring Induction MotorsTuhin ShahNo ratings yet
- Chapter 7: Alternating Current Motors: Electrical MachineDocument28 pagesChapter 7: Alternating Current Motors: Electrical MachineThe zeroNo ratings yet
- AmanDocument19 pagesAmanGirijesh Yadav0% (1)
- Electric motors and transformers in industriesDocument12 pagesElectric motors and transformers in industriesJayNo ratings yet
- Stepper Motor GuideDocument13 pagesStepper Motor Guidejit dharaNo ratings yet
- Sec12 - Electric MotorsDocument12 pagesSec12 - Electric MotorsYusufNo ratings yet
- Electrical Machines II AnswerDocument24 pagesElectrical Machines II AnswerGurulathan SoosairajNo ratings yet
- EE313 Class10Document9 pagesEE313 Class10Zahid MarwatNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Delta Connected Systems and Power Factor in AC MotorsDocument32 pagesDelta Connected Systems and Power Factor in AC MotorsSyed MamnoonNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- Stepper Motor GuideDocument14 pagesStepper Motor GuideJade Mark RamosNo ratings yet
- EE2403 - Special Electrical Machines Questions and AnswersDocument15 pagesEE2403 - Special Electrical Machines Questions and AnswerskesavantNo ratings yet
- Induction Motors Unit 3Document26 pagesInduction Motors Unit 3babu KaroliNo ratings yet
- Synchronous MotorDocument21 pagesSynchronous MotorAlaine Jan de TablanNo ratings yet
- GMI AC Motor GuideDocument54 pagesGMI AC Motor GuideSmai HondoNo ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- Basic Induction Motors ConceptDocument16 pagesBasic Induction Motors ConceptSumaira SaifNo ratings yet
- Basic Induction Motors ConceptDocument16 pagesBasic Induction Motors ConceptSumaira SaifNo ratings yet
- A Synchronous Motor From A Hammond OrganDocument8 pagesA Synchronous Motor From A Hammond Organsiva prakashNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Everything You Need to Know About Servo ControlDocument24 pagesEverything You Need to Know About Servo Controlafe2000must9083No ratings yet
- Stepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsDocument11 pagesStepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsrvpilotNo ratings yet
- Engineering Alternative Energy-Wind and Solar Power Systems-112Document1 pageEngineering Alternative Energy-Wind and Solar Power Systems-112Antar AbdalaNo ratings yet
- 8 9 EMEC Polyphase Induction Machines Part I&IIDocument52 pages8 9 EMEC Polyphase Induction Machines Part I&IIOruc MusayevNo ratings yet
- 4 Wind Turbine GeneratorsDocument14 pages4 Wind Turbine Generatorsabhishek dubeyNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- Project DocumentDocument95 pagesProject DocumentsyabseeshoesNo ratings yet
- Synchronous motor basics: How they work, types, constructionDocument8 pagesSynchronous motor basics: How they work, types, constructionMsKaroly100% (1)
- An Introduction To Permanent-Magnet Gearless Motors and Drive Control SystemsDocument8 pagesAn Introduction To Permanent-Magnet Gearless Motors and Drive Control SystemsTaufikNo ratings yet
- II yr/III Sem/Mech/EEE 2 Marks With Answers Unit-IIDocument5 pagesII yr/III Sem/Mech/EEE 2 Marks With Answers Unit-IIanunilaNo ratings yet
- AC Motors: Almocera, Richlyn Iza R. Mitra, Jervelyn Kae FDocument41 pagesAC Motors: Almocera, Richlyn Iza R. Mitra, Jervelyn Kae FIcon Byl P. VergaraNo ratings yet
- Electric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Document6 pagesElectric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Vasudev SurendranNo ratings yet
- Module-VI AC MachinesDocument12 pagesModule-VI AC MachinesLokesh Reddy B.No ratings yet
- Lecture 6 - Induction MotorsDocument34 pagesLecture 6 - Induction Motorsswamy_satya20004521No ratings yet
- SPECIAL ELECTRICAL MACHINES - Questions & AnswersDocument38 pagesSPECIAL ELECTRICAL MACHINES - Questions & AnswersMuhammad JunaidNo ratings yet
- Brushless Servo MotorsDocument4 pagesBrushless Servo MotorsServomotores SimairNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Main Fractionator RevampDocument6 pagesMain Fractionator RevampAmit Yadav0% (1)
- Crude Unit Startup Consequences of High Liquid LevelDocument4 pagesCrude Unit Startup Consequences of High Liquid LevelAlessio ScarabelliNo ratings yet
- 195Document6 pages195YADAV ANIL KUMARNo ratings yet
- Derive 63 RuleDocument2 pagesDerive 63 RuleAndrei StefanNo ratings yet
- Approaching The RevampDocument6 pagesApproaching The RevampAlessio ScarabelliNo ratings yet
- Fluid dynamics forces and coefficientsDocument12 pagesFluid dynamics forces and coefficientsAlessio ScarabelliNo ratings yet
- Maximizing Gas Plant CapacityDocument6 pagesMaximizing Gas Plant CapacityAlessio ScarabelliNo ratings yet
- Fast Tracking An FCC RevampDocument8 pagesFast Tracking An FCC RevampAlessio ScarabelliNo ratings yet
- Correct FCC Tower RevampDocument8 pagesCorrect FCC Tower RevampAlessio ScarabelliNo ratings yet
- Designing CDU/VDUs for Heavy Opportunity CrudesDocument4 pagesDesigning CDU/VDUs for Heavy Opportunity CrudessenkuttuvanNo ratings yet
- Lessons From Three Mile Island Visual Design in A High Stakes EnvironmentDocument28 pagesLessons From Three Mile Island Visual Design in A High Stakes EnvironmentAlessio ScarabelliNo ratings yet
- Diesel and VGO RecoveryDocument4 pagesDiesel and VGO RecoveryAlessio ScarabelliNo ratings yet
- Hydro TreatingDocument189 pagesHydro TreatingAdeel AhmedNo ratings yet
- Efficiency Coefficient of Mechanical TransmissionsDocument4 pagesEfficiency Coefficient of Mechanical TransmissionsAlessio ScarabelliNo ratings yet
- Dynamic Analysis of A Point MassDocument7 pagesDynamic Analysis of A Point MassAlessio ScarabelliNo ratings yet
- Mass Moment InertiaDocument7 pagesMass Moment InertiaAlessio ScarabelliNo ratings yet
- Su27 Eng 1Document103 pagesSu27 Eng 1Alessio ScarabelliNo ratings yet
- Virtual Work and Power BalanceDocument5 pagesVirtual Work and Power BalanceAlessio ScarabelliNo ratings yet
- 125mm Gun Tank BK HEATDocument3 pages125mm Gun Tank BK HEATAlessio ScarabelliNo ratings yet
- Analog Electronic PID Controller TechnologyDocument8 pagesAnalog Electronic PID Controller TechnologyAlessio ScarabelliNo ratings yet
- Joints and Linkages: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyDocument10 pagesJoints and Linkages: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliNo ratings yet
- Mech Transmission v2Document21 pagesMech Transmission v2Alessio ScarabelliNo ratings yet
- Cam Mechanisms and Transmission SystemsDocument12 pagesCam Mechanisms and Transmission SystemsAlessio ScarabelliNo ratings yet
- Transmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyDocument8 pagesTransmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliNo ratings yet
- Mech Transmission v2Document21 pagesMech Transmission v2Alessio ScarabelliNo ratings yet
- Induction Motors v1Document4 pagesInduction Motors v1Alessio ScarabelliNo ratings yet
- Mech Transmission v4Document11 pagesMech Transmission v4Alessio ScarabelliNo ratings yet
- Kinematics v1Document23 pagesKinematics v1Alessio ScarabelliNo ratings yet
- Friction ADocument23 pagesFriction AAlessio ScarabelliNo ratings yet
- A6 AFN Wiring DiagramDocument10 pagesA6 AFN Wiring DiagramDardan HusiNo ratings yet
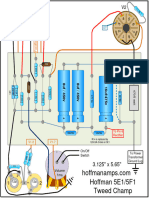
- Hoffman 5F1Document4 pagesHoffman 5F1samuel tassiniNo ratings yet
- Sinko: Love Our EarthDocument13 pagesSinko: Love Our Earthmanchau717No ratings yet
- Royal Enfield Price ListDocument480 pagesRoyal Enfield Price Listshibasis saha100% (1)
- Spec 500 MT 020514 Godown 500mtDocument16 pagesSpec 500 MT 020514 Godown 500mtdraqbhattiNo ratings yet
- Brief History of Music Dynamics and Dynamic MarkingsDocument12 pagesBrief History of Music Dynamics and Dynamic MarkingsJade Abella VillavelezNo ratings yet
- DatasheetDocument9 pagesDatasheetkishore_bulli6666No ratings yet
- Spare Parts List: WarningDocument5 pagesSpare Parts List: WarningÃbdøū Èqúípmeńť MédîcàlNo ratings yet
- DRB Infrastructure PVT - LTD.: Maintenance & Servicing Schedules For The Site: Seepa-ChayngtajoDocument9 pagesDRB Infrastructure PVT - LTD.: Maintenance & Servicing Schedules For The Site: Seepa-ChayngtajoER Sudhir MishraNo ratings yet
- KRC2 The - Kuka - Control - PanelDocument7 pagesKRC2 The - Kuka - Control - PanelMarc MeursNo ratings yet
- Installation Manual Small VECTORDocument2 pagesInstallation Manual Small VECTORMinurajNo ratings yet
- Betelco - SPL-315 kVA SS-1.1Document8 pagesBetelco - SPL-315 kVA SS-1.1Mahmudur Rahman100% (1)
- GB m02 - Sipoc ExtendedDocument1 pageGB m02 - Sipoc ExtendedVíctor Manuel Hernández PNo ratings yet
- Lightning Link Printable Template V1.0Document4 pagesLightning Link Printable Template V1.0Gilberto Hill82% (22)
- Type SSM SoftstartersDocument2 pagesType SSM SoftstartersMustapha ElecNo ratings yet
- Electromagnetic InductionDocument5 pagesElectromagnetic InductionTreshan StaynNo ratings yet
- Servicing Deutsch HD and DT Style Connectors (1408) : Tool Operating ManualDocument16 pagesServicing Deutsch HD and DT Style Connectors (1408) : Tool Operating ManualRajan MullappillyNo ratings yet
- SK 19517Document2 pagesSK 19517Carey C Jones100% (1)
- NeutraDocument6 pagesNeutraKinga KokovicsNo ratings yet
- Genec W35Document3 pagesGenec W35Frank HigueraNo ratings yet
- Connecting an engine control moduleDocument1 pageConnecting an engine control moduleOmar Hernández100% (1)
- Experiment 5Document8 pagesExperiment 5rastgonikoNo ratings yet
- Praxis Mini Guard 008Document4 pagesPraxis Mini Guard 008SandroCezardeAraujo50% (2)
- R FactorsDocument5 pagesR FactorsAneesh KNo ratings yet
- Power Metal Fixed Resistors: FeaturesDocument2 pagesPower Metal Fixed Resistors: FeaturesMiguel Angel Riveros GuzmanNo ratings yet
- Troubleshooting The ETR Full Protective System (OP, WT, OS)Document14 pagesTroubleshooting The ETR Full Protective System (OP, WT, OS)Richard ChuaNo ratings yet
- C15 On-Highway Engine Electrical System: Harness and Wire Electrical Schematic SymbolsDocument2 pagesC15 On-Highway Engine Electrical System: Harness and Wire Electrical Schematic SymbolsPablo CervantesNo ratings yet
- Uninterruptible Power Supply System Selection PDFDocument139 pagesUninterruptible Power Supply System Selection PDFrajpre1213100% (1)
- 1997 SubaruDocument148 pages1997 Subarubillh@optonline.net100% (1)
- Competency Based Learning Material: Electrical Installation AND Maintenance NC IiDocument59 pagesCompetency Based Learning Material: Electrical Installation AND Maintenance NC IiTimothy John Natal Mandia100% (1)