You might also like
- Week 10 - Kirchhoffs LawDocument6 pagesWeek 10 - Kirchhoffs LawRowen PratherNo ratings yet
- Flight Direction Cosine MatrixDocument11 pagesFlight Direction Cosine MatrixsazradNo ratings yet
- Electrical Circuits and Magnetic Fields MCQDocument44 pagesElectrical Circuits and Magnetic Fields MCQdinesh kumarNo ratings yet
- Bài 5 - Lateral Motion (Stick Fixed) (2008)Document12 pagesBài 5 - Lateral Motion (Stick Fixed) (2008)neiht_ksNo ratings yet
- 1 Introduction To Power System AnalysisDocument33 pages1 Introduction To Power System AnalysisSatta DhillonNo ratings yet
- Combined Gas LawDocument19 pagesCombined Gas LawDhea Angela A. Capuyan100% (2)
- Assignment2 Sol PDFDocument4 pagesAssignment2 Sol PDFJLNo ratings yet
- Sircar2000 - Why Does The Linear Driving Force Model For Adsorption KineticsWorkDocument11 pagesSircar2000 - Why Does The Linear Driving Force Model For Adsorption KineticsWorkdianapssbragaNo ratings yet
- Transfer Function for π Filter CircuitDocument7 pagesTransfer Function for π Filter CircuitBarney StinsonNo ratings yet
- JEE - MODULE 2 - PHY - Magnetism, EMI - ACDocument170 pagesJEE - MODULE 2 - PHY - Magnetism, EMI - ACHrittik Das100% (1)
- AREVA The Testing of TransformerDocument49 pagesAREVA The Testing of TransformerOsman Ahmed100% (2)
- MUCLecture 2022 42228583Document2 pagesMUCLecture 2022 42228583Muhammad Ayan Malik100% (1)
- Transport Phenomena - 7 - Conservation of Momentum3Document34 pagesTransport Phenomena - 7 - Conservation of Momentum3HareritamNo ratings yet
- The Fundamental Theorem of Calculus and The Poincaré LemmaDocument13 pagesThe Fundamental Theorem of Calculus and The Poincaré LemmasuperscriberNo ratings yet
- Vector Functions: Derivatives, Integrals, Limits and ApplicationsDocument33 pagesVector Functions: Derivatives, Integrals, Limits and ApplicationsUzma AslamNo ratings yet
- 2843 Solutions Chap9Document10 pages2843 Solutions Chap9Thomas LiuNo ratings yet
- M01 Hibb0000 00 Se C16Document153 pagesM01 Hibb0000 00 Se C16luisloredoperez156No ratings yet
- Mathematical model of rider-tricycle systemDocument7 pagesMathematical model of rider-tricycle systemglazy BrianNo ratings yet
- Analytical Methods of Position Analysis: Freudenstein's EquationDocument31 pagesAnalytical Methods of Position Analysis: Freudenstein's EquationAnkit AmbaniNo ratings yet
- Grad Proj Method 2 June 2022Document14 pagesGrad Proj Method 2 June 2022Orizon FerreiraNo ratings yet
- Makalah Pemicu 2 Kelompok 5Document17 pagesMakalah Pemicu 2 Kelompok 5Bhujangga binangjNo ratings yet
- A2 41b CircularmotionDocument38 pagesA2 41b CircularmotionHany ElGezawyNo ratings yet
- ProblemDocument2 pagesProblemJishnuNo ratings yet
- 4 - Lecture-3 (Part-02) Buckling and Stability of ColumnsDocument35 pages4 - Lecture-3 (Part-02) Buckling and Stability of ColumnsRubab ZahraNo ratings yet
- LCAO method for diatomic moleculesDocument8 pagesLCAO method for diatomic moleculesVandana AdiwasiNo ratings yet
- Harmonic Oscillator & Rigid Rotor ModelsDocument14 pagesHarmonic Oscillator & Rigid Rotor ModelsJisu RyuNo ratings yet
- Chapter 7 Circular MotionDocument7 pagesChapter 7 Circular MotionaleyhaiderNo ratings yet
- Mini-Quiz Documents on Oscillations and WavesDocument11 pagesMini-Quiz Documents on Oscillations and WavescmegmhiNo ratings yet
- Parallelogram LawDocument7 pagesParallelogram LawJeevanandam ShanmugasundaramNo ratings yet
- 10 Transmission LinesDocument6 pages10 Transmission LinesGoldy BanerjeeNo ratings yet
- Section 3.0 Oscillations and WavesDocument63 pagesSection 3.0 Oscillations and WavesKennedy MudawarimaNo ratings yet
- 4 ChapterDocument46 pages4 ChapterRama ChilpuriNo ratings yet
- Chap1 4Document12 pagesChap1 4Mohamed JalalaNo ratings yet
- Radar LectureDocument35 pagesRadar Lecturec406400No ratings yet
- SIMPLE AlgorithmDocument13 pagesSIMPLE AlgorithmprabumnNo ratings yet
- JNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIDocument2 pagesJNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIMRUDULA KULAKARNINo ratings yet
- Griffith's Quantum Mechanics Problem 2.51Document3 pagesGriffith's Quantum Mechanics Problem 2.51palisonNo ratings yet
- Problems 1Document3 pagesProblems 1Pablo AlejandroNo ratings yet
- Expansion Waves (Prandtl Meyer Flow)Document19 pagesExpansion Waves (Prandtl Meyer Flow)Hamza AshrafNo ratings yet
- Solutions For Chapter 3 HW3 Problems: B A B A I Z Z CM X A X MDocument5 pagesSolutions For Chapter 3 HW3 Problems: B A B A I Z Z CM X A X MAli IbrahimNo ratings yet
- Fluid 11Document210 pagesFluid 11Omolafe Olawale SamuelNo ratings yet
- MAT301H1Document52 pagesMAT301H1Andrew LeeNo ratings yet
- Circular MotionDocument28 pagesCircular MotionPhan NingNo ratings yet
- Exam 2 Cheat SheetDocument2 pagesExam 2 Cheat SheetAmyNo ratings yet
- Yang-Mills Theory On The Light ConeDocument14 pagesYang-Mills Theory On The Light Cones4suchiNo ratings yet
- KAUST EE 244 Wireless Communications HomeworkDocument3 pagesKAUST EE 244 Wireless Communications HomeworkxyzabcutubeNo ratings yet
- Emg 211 Lecture Notes 2013-1Document36 pagesEmg 211 Lecture Notes 2013-1Abdulhameed FaridahNo ratings yet
- 06cDocument69 pages06cDan FarrisNo ratings yet
- 9 Whirling of Shafts Notes - BarasaDocument7 pages9 Whirling of Shafts Notes - Barasakalu kioNo ratings yet
- M55 Lec15 The Fundamental Theorem of Line Integrals and Greens Theorem PDFDocument19 pagesM55 Lec15 The Fundamental Theorem of Line Integrals and Greens Theorem PDFalyssaNo ratings yet
- Assignment3Document3 pagesAssignment3Ashwin IndwarNo ratings yet
- Quantenoptik Vorlesung6 PDFDocument11 pagesQuantenoptik Vorlesung6 PDFErinSuttonNo ratings yet
- Exponentials of Operators - Baker-Campbell-Hausdorff Formula - Physics PagesDocument5 pagesExponentials of Operators - Baker-Campbell-Hausdorff Formula - Physics PagesJuan Camilo Rodríguez PérezNo ratings yet
- Greens Theorem ProofDocument5 pagesGreens Theorem ProofGaurav DharNo ratings yet
- Vietnam National University Mechanical Transmission DesignDocument28 pagesVietnam National University Mechanical Transmission DesignMinh HuyNo ratings yet
- Rayleigh FlowDocument2 pagesRayleigh FlowpraveenrajjNo ratings yet
- tmp1295 TMPDocument9 pagestmp1295 TMPFrontiersNo ratings yet
- BiDocument62 pagesBiNURUL SYUHADA BT ISMAIL HAJAR100% (2)
- Problem 1:: Concepts, Principles, Relations That Apply To The ProblemDocument6 pagesProblem 1:: Concepts, Principles, Relations That Apply To The ProblemVishal GoyalNo ratings yet
- SMO Open 16Document4 pagesSMO Open 16JonNo ratings yet
- Drag Polar Assignment - Nathan Cook P4096835Document9 pagesDrag Polar Assignment - Nathan Cook P4096835Anonymous 2iMBk59NXLNo ratings yet
- 111 Worksheets For Calculus 1 4Document4 pages111 Worksheets For Calculus 1 4林皓群No ratings yet
- Univalent Harmonic FunctionsDocument4 pagesUnivalent Harmonic FunctionsAdvanced Research Publications100% (2)
- MATH40082 (Computational Finance) Assignment No. 2: Advanced MethodsDocument6 pagesMATH40082 (Computational Finance) Assignment No. 2: Advanced Methodscracking khalifNo ratings yet
- Tangent CamsDocument26 pagesTangent Camsamurugan_22100% (1)
- Lesson 1 Section 1 - 2018Document28 pagesLesson 1 Section 1 - 2018Sphumelele SibuthaNo ratings yet
- Lesson AGMA Standard - Example 1 & 2Document23 pagesLesson AGMA Standard - Example 1 & 2Sphumelele SibuthaNo ratings yet
- Exp 7 Crank and Slider MechanismDocument11 pagesExp 7 Crank and Slider MechanismSphumelele SibuthaNo ratings yet
- EXERCISES Clutch DynamicsDocument3 pagesEXERCISES Clutch DynamicsSphumelele SibuthaNo ratings yet
- Exp 7 Crank and Slider MechanismDocument4 pagesExp 7 Crank and Slider MechanismSphumelele SibuthaNo ratings yet
- Mechanical Engineering Dynamics of Machines Analysis of Cams NotesDocument26 pagesMechanical Engineering Dynamics of Machines Analysis of Cams NotesSphumelele SibuthaNo ratings yet
- Mechanical Engineering Dynamics of Machines Analysis of Cams NotesDocument26 pagesMechanical Engineering Dynamics of Machines Analysis of Cams NotesSphumelele SibuthaNo ratings yet
- Mechanical Engineering Dynamics of Machines Analysis of Cams NotesDocument26 pagesMechanical Engineering Dynamics of Machines Analysis of Cams NotesSphumelele SibuthaNo ratings yet
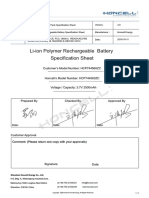
- Li-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCDocument17 pagesLi-Ion Polymer Rechargeable Battery Specification Sheet: Customer's Model Number: HCP744560ZCJhoanie Marie Cauan100% (1)
- Syllabus - EE1100 (April - June 2021)Document1 pageSyllabus - EE1100 (April - June 2021)Phalgun Mukesh Vyas ch19b076No ratings yet
- Work and energy concepts for physics documentDocument4 pagesWork and energy concepts for physics documentNorvie Magdato RuelNo ratings yet
- Analysis of windscreen wiper mechanism using MSC AdamsDocument15 pagesAnalysis of windscreen wiper mechanism using MSC AdamsDeepak SomanNo ratings yet
- Inductance Meter AdapterDocument3 pagesInductance Meter AdapterioanNo ratings yet
- D176Document10 pagesD176Diego Castillo JaramilloNo ratings yet
- NoteDocument3 pagesNotemtam.ctrlNo ratings yet
- Students Dream Box Academy: Guduvanchery / Tambaram / Chrompet / SpkoilDocument8 pagesStudents Dream Box Academy: Guduvanchery / Tambaram / Chrompet / SpkoilSTUDENTS DREAM BOX - CBSENo ratings yet
- Electric Charges and ForcesDocument76 pagesElectric Charges and ForcesMaslinda Mat SharifNo ratings yet
- Series ParallelDocument4 pagesSeries ParallelDonna MelgarNo ratings yet
- Review of Fundamental Vibration TheoryDocument34 pagesReview of Fundamental Vibration TheoryMohamed KhaledNo ratings yet
- ch1 14merged PDFDocument91 pagesch1 14merged PDFApple VidalNo ratings yet
- Group Group Group Diane Phys 121A Lab Professor Towfik Lab 223: Faraday's LawDocument4 pagesGroup Group Group Diane Phys 121A Lab Professor Towfik Lab 223: Faraday's LawHillary AvecillasNo ratings yet
- SDOFDocument107 pagesSDOFMohammed B TuseNo ratings yet
- Comparison of Linear and Rotational MotionDocument2 pagesComparison of Linear and Rotational MotionAnurag MalikNo ratings yet
- SEA LORD CONTAINERS LTD VOC ESTIMATION DATA ANALYSISDocument6 pagesSEA LORD CONTAINERS LTD VOC ESTIMATION DATA ANALYSISshubhamNo ratings yet
- ACTIVITIES-FOR-4TH-QUARTERDocument7 pagesACTIVITIES-FOR-4TH-QUARTERFernan SibugNo ratings yet
- 10 Fluid Mechanics Formula Sheets QuizrrDocument9 pages10 Fluid Mechanics Formula Sheets QuizrrDhairya SharmaNo ratings yet
- Chap. 3: First Law of ThermodynamicsDocument33 pagesChap. 3: First Law of ThermodynamicsYeshan JuberiNo ratings yet
- Mark Scheme (Results) : Summer 2018Document20 pagesMark Scheme (Results) : Summer 2018Thasanya AlgamaNo ratings yet
- Science Form 1 Chapter 1 (1.3)Document5 pagesScience Form 1 Chapter 1 (1.3)yasNo ratings yet
- Assignment 4.1Document5 pagesAssignment 4.1Khanur AysahNo ratings yet
- PDF Compiled DLDocument477 pagesPDF Compiled DLrickyNo ratings yet
- DPP-5 (E) Main To Adv. - PhysicsDocument16 pagesDPP-5 (E) Main To Adv. - PhysicsPrasann KatiyarNo ratings yet