You might also like
- Mechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsFrom EverandMechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsNo ratings yet
- Optimization Metal Forming18 ADocument10 pagesOptimization Metal Forming18 ARaees SwatiNo ratings yet
- BIW Structure Development in Accordance With PassiDocument10 pagesBIW Structure Development in Accordance With PassideepuNo ratings yet
- Jchps 9 (4) 111 Paul Chandra Kumar 250 2371-2375Document5 pagesJchps 9 (4) 111 Paul Chandra Kumar 250 2371-2375Elakkiya DasanNo ratings yet
- Lightweight Optimization of Bus Frame Structure Considering Rollover SafetyDocument12 pagesLightweight Optimization of Bus Frame Structure Considering Rollover SafetyAnkush khuranaNo ratings yet
- Optimization To Body in White DesignDocument14 pagesOptimization To Body in White Designharshal161987No ratings yet
- CrashDocument6 pagesCrashBrahim KhNo ratings yet
- Bolbot Etal MOSES2019 Cruise Ship Optimal Power Plants Design Identification and Quantitative Safety AssessmentDocument10 pagesBolbot Etal MOSES2019 Cruise Ship Optimal Power Plants Design Identification and Quantitative Safety AssessmentJavier Serrano ReyesNo ratings yet
- 1 s2.0 S2352152X23016407 MainDocument11 pages1 s2.0 S2352152X23016407 MainWEIWEI YANGNo ratings yet
- Probabilistic Optimization of Mg-Based Composite Aircraft Frame - ADocument4 pagesProbabilistic Optimization of Mg-Based Composite Aircraft Frame - AVivek ChawlaNo ratings yet
- Analysis and Use of SIMP Method in Optimization of A Car Hood DesignDocument5 pagesAnalysis and Use of SIMP Method in Optimization of A Car Hood DesignGogyNo ratings yet
- FE Simulation of HoneycombDocument5 pagesFE Simulation of HoneycombManoj KumarNo ratings yet
- Topology Optimization of A Lightweight Multi-Material Cowl Cross Member Using Matrix Input With The Craig Bampton Nodal MethodDocument6 pagesTopology Optimization of A Lightweight Multi-Material Cowl Cross Member Using Matrix Input With The Craig Bampton Nodal MethodMuhammad AnshaalNo ratings yet
- A Novel Fractional Order Model Based State-Of-Charge Estimation Method For Lithium-Ion Battery IMPEDANCEDocument10 pagesA Novel Fractional Order Model Based State-Of-Charge Estimation Method For Lithium-Ion Battery IMPEDANCEOsito de AguaNo ratings yet
- Chassis Design ImportantDocument27 pagesChassis Design ImportantNandan PoojaryNo ratings yet
- 2020 Optimisation of The Lateral Buckling Strength of Corrugated CompositeDocument16 pages2020 Optimisation of The Lateral Buckling Strength of Corrugated CompositeHussein M. H. Al-KhafajiNo ratings yet
- Improving The Crashworthiness of An Automobile Bumper: Arun Basil Jacob Arunkumar O.NDocument13 pagesImproving The Crashworthiness of An Automobile Bumper: Arun Basil Jacob Arunkumar O.NyousefNo ratings yet
- Optimal Design of Charging Stations For Electrified Transit NetworksDocument7 pagesOptimal Design of Charging Stations For Electrified Transit NetworksRicardo MartinezNo ratings yet
- White Paper Case Study - Speed Optimization - 02 1Document9 pagesWhite Paper Case Study - Speed Optimization - 02 1AlexkapalNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Mesh Generation and Energy Group Condensation Studies For The Jaguar Deterministic Transport CodeDocument15 pagesMesh Generation and Energy Group Condensation Studies For The Jaguar Deterministic Transport Codewatsona4No ratings yet
- Expert Systems With Applications: Lorena Pradenas, Boris Oportus, Víctor ParadaDocument7 pagesExpert Systems With Applications: Lorena Pradenas, Boris Oportus, Víctor ParadaFelipe Rodríguez RojasNo ratings yet
- Optimisation of Laminated Composite Materials Using A Genetic AlgorithmDocument3 pagesOptimisation of Laminated Composite Materials Using A Genetic Algorithmsel2183vamNo ratings yet
- A Novel Hybrid Energy Management Strategy of A Diesel-Electric Hybrid Ship Based On Dynamic Programing and Model Predictive ControlDocument14 pagesA Novel Hybrid Energy Management Strategy of A Diesel-Electric Hybrid Ship Based On Dynamic Programing and Model Predictive ControlLam VuNo ratings yet
- Iowtc2022 98217Document10 pagesIowtc2022 98217Quién SabeNo ratings yet
- Valley-Period Dispatched Strategy of Electric Vehicles in Charging StationDocument5 pagesValley-Period Dispatched Strategy of Electric Vehicles in Charging StationAli HussienNo ratings yet
- Development of A Lightweight Tubular Space FrameDocument7 pagesDevelopment of A Lightweight Tubular Space FrameJony M. TemnikarNo ratings yet
- Optimal Economic-Emission Load Dispatch in Microgrid Incorporating Renewable Energy Sources by Golden Jackal Optimization (GJO) and Mexican Axolotl Optimization (MAO)Document26 pagesOptimal Economic-Emission Load Dispatch in Microgrid Incorporating Renewable Energy Sources by Golden Jackal Optimization (GJO) and Mexican Axolotl Optimization (MAO)atbalapowerNo ratings yet
- Stochastic Energy Management For Microgrids With Constraints Under UncertaintyDocument6 pagesStochastic Energy Management For Microgrids With Constraints Under UncertaintyFadi HamedNo ratings yet
- Adaptive Multiresolution Energy Consumption Prediction For Electric VehiclesDocument11 pagesAdaptive Multiresolution Energy Consumption Prediction For Electric VehiclesMuhammed AlhanoutiNo ratings yet
- 2019 IOP Conf. Ser. Mater. Sci. Eng. 568 012054Document6 pages2019 IOP Conf. Ser. Mater. Sci. Eng. 568 012054liviu_scurtu4656No ratings yet
- A Novel Energy Management Strategy For Hybrid Electric Vehicles IEEEDocument12 pagesA Novel Energy Management Strategy For Hybrid Electric Vehicles IEEEDamir JelaskaNo ratings yet
- Multi-Level Optimization of Gear Trains With Spur Gears: Hamid - Zaghar@usmba - Ac.maDocument4 pagesMulti-Level Optimization of Gear Trains With Spur Gears: Hamid - Zaghar@usmba - Ac.maAbdelmajid AittalebNo ratings yet
- Super Computing Applications in Internal Combustion Engine Design andDocument8 pagesSuper Computing Applications in Internal Combustion Engine Design andMadhusudan BarotNo ratings yet
- Optimization Formulations For Composite Structures Subjected To Compression LoadsDocument2 pagesOptimization Formulations For Composite Structures Subjected To Compression LoadsVignesh SelvarajNo ratings yet
- Energies 15 07243 v3Document26 pagesEnergies 15 07243 v3Tran DanteNo ratings yet
- Multi-Objective and Multi-Case Reliability-Based Design Optimization For Tailor Rolled Blank (TRB) StructuresDocument18 pagesMulti-Objective and Multi-Case Reliability-Based Design Optimization For Tailor Rolled Blank (TRB) StructuresmanuelNo ratings yet
- Fitting Cyclic Experimental Load-Deformation Data To The Pivot Hysteresis Model Using Genetic AlgorithmDocument13 pagesFitting Cyclic Experimental Load-Deformation Data To The Pivot Hysteresis Model Using Genetic AlgorithmCarlos Bahamonde OjedaNo ratings yet
- EMS For Fuel Saving in An Isolated Hybrid SystemDocument4 pagesEMS For Fuel Saving in An Isolated Hybrid Systemamina.eloualiNo ratings yet
- Applications Using Finite Element Methods To Reduce The Cost of Composite StructuresDocument25 pagesApplications Using Finite Element Methods To Reduce The Cost of Composite StructuresVenkata DineshNo ratings yet
- Ship Energy Management System Development and Experimental Evalu - 2022 - ApplieDocument19 pagesShip Energy Management System Development and Experimental Evalu - 2022 - ApplieDAN CHAMZNo ratings yet
- Energy Reports NickyDocument6 pagesEnergy Reports Nickyluca masengaNo ratings yet
- Structural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaDocument8 pagesStructural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaSanjana ShettyNo ratings yet
- Dynamic Analysis of A Car Chassis Frame Using The Finite Element MethodDocument10 pagesDynamic Analysis of A Car Chassis Frame Using The Finite Element MethodNir ShoNo ratings yet
- Lu 2019Document20 pagesLu 2019Kivanc PekerNo ratings yet
- Optimised Ultrafast Lightweight Design A PDFDocument33 pagesOptimised Ultrafast Lightweight Design A PDFBharat SinghNo ratings yet
- Modelling of Highway Bridge Traffic Loading - Some Recent AdvancesDocument9 pagesModelling of Highway Bridge Traffic Loading - Some Recent AdvancesKhalilNo ratings yet
- Plasticos MetodologiaDocument13 pagesPlasticos MetodologiaAlonso FuentesNo ratings yet
- Aerodynamic Analysis Involving Moving Parts With XFlowDocument12 pagesAerodynamic Analysis Involving Moving Parts With XFlowDmitry GrenishenNo ratings yet
- Development of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisDocument13 pagesDevelopment of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisSnunkhaem EcharojNo ratings yet
- Development of Hybrid Vehicle Energy Consumption Model - I 2020Document20 pagesDevelopment of Hybrid Vehicle Energy Consumption Model - I 2020ruben rosete hernandezNo ratings yet
- Dillinger2019 Article StaticAeroelasticStiffnessOpti PDFDocument18 pagesDillinger2019 Article StaticAeroelasticStiffnessOpti PDFIancu ParaschivNo ratings yet
- ParkEtal05 DynamicOptimizationWithEquivStaticLoadsDocument14 pagesParkEtal05 DynamicOptimizationWithEquivStaticLoadsJeff HNo ratings yet
- Designing Lightweight Diesel Engine Alternator Support Bracket With Topology Optimization MethodologyDocument21 pagesDesigning Lightweight Diesel Engine Alternator Support Bracket With Topology Optimization MethodologyAhmad AmeerNo ratings yet
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoNo ratings yet
- Kobe University Repository: KernelDocument27 pagesKobe University Repository: KernelTrầmLãngNo ratings yet
- A Meso-Macro Scale Method For Jointed Structures and Their Failure AnalysisDocument9 pagesA Meso-Macro Scale Method For Jointed Structures and Their Failure AnalysisMarian OstrowskiNo ratings yet
- 8 - Ensemble Tree Machine Learning Models For Improvement of Eurocode2 Creep Model Prediction (CEE 2022)Document11 pages8 - Ensemble Tree Machine Learning Models For Improvement of Eurocode2 Creep Model Prediction (CEE 2022)Sara HassounNo ratings yet
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliNo ratings yet
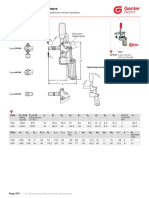
- 862 1Document2 pages862 1JuanJo LlamasNo ratings yet
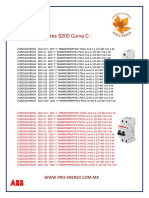
- Interruptores S200 Curva CDocument2 pagesInterruptores S200 Curva CJuanJo LlamasNo ratings yet
- Audi QualityDocument23 pagesAudi QualityJuanJo LlamasNo ratings yet
- TC Standard MBA R04-2016 V02 enDocument56 pagesTC Standard MBA R04-2016 V02 enJuanJo LlamasNo ratings yet
- Parts PDFDocument17 pagesParts PDFJuanJo LlamasNo ratings yet
- Coatings 06 00024 PDFDocument22 pagesCoatings 06 00024 PDFcvazquez999No ratings yet
- CSWP-WLDM Sample ExamDocument12 pagesCSWP-WLDM Sample ExamJose CuevasNo ratings yet
- BIW PartsDocument17 pagesBIW PartsJuanJo LlamasNo ratings yet
- Chapter 2: AC Gearmotors and MotorsDocument10 pagesChapter 2: AC Gearmotors and MotorsJuanJo LlamasNo ratings yet
- BIW ConceptsDocument62 pagesBIW ConceptsNitish Naudiyal100% (7)
- DSL-B EnusDocument24 pagesDSL-B EnusJuanJo LlamasNo ratings yet
- DSL-B EnusDocument24 pagesDSL-B EnusJuanJo LlamasNo ratings yet
- DSL-B EnusDocument24 pagesDSL-B EnusJuanJo LlamasNo ratings yet
- Improvement of Automatic Fish Feeder Machine DesigDocument8 pagesImprovement of Automatic Fish Feeder Machine DesigJuanJo LlamasNo ratings yet
- Ternary en PDFDocument36 pagesTernary en PDFJuanJo LlamasNo ratings yet
- Coatings 06 00024 PDFDocument22 pagesCoatings 06 00024 PDFcvazquez999No ratings yet
- Coatings 06 00024 PDFDocument22 pagesCoatings 06 00024 PDFcvazquez999No ratings yet
- Jouf University: Department of Information Systems Dr. Abd El-Aziz Ahmed Java Programming Fall 2018 Practice Lab 1Document2 pagesJouf University: Department of Information Systems Dr. Abd El-Aziz Ahmed Java Programming Fall 2018 Practice Lab 1wiemNo ratings yet
- Moving Charges and Magnetism 2Document43 pagesMoving Charges and Magnetism 2Mavn LoginNo ratings yet
- Several Problems of The Polish Physics Olympiad: Waldemar GorzkowskiDocument4 pagesSeveral Problems of The Polish Physics Olympiad: Waldemar GorzkowskiVikram SaurabhNo ratings yet
- Infrared Camera - Thermal Imager - IR Camera - Thermal ImagingDocument7 pagesInfrared Camera - Thermal Imager - IR Camera - Thermal ImagingborescopeNo ratings yet
- Gem Lesson 1Document17 pagesGem Lesson 1Ritheria100% (1)
- Drop Impact Dynamics: Splashing, Spreading, Receding, BouncingDocument36 pagesDrop Impact Dynamics: Splashing, Spreading, Receding, BouncingHarshini AichNo ratings yet
- Hardness Test BlocksDocument2 pagesHardness Test BlocksAvijit DebnathNo ratings yet
- Resummation and Renormalization in Eff Ective Theories of Particle PhysicsDocument229 pagesResummation and Renormalization in Eff Ective Theories of Particle PhysicsDomenico Barillari100% (2)
- SETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesDocument74 pagesSETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesSonu Singh100% (4)
- Paper - Fatigue Lifetime of Welded Joints Under Random Loading - Colombini P., Dolinski K. - 2001Document11 pagesPaper - Fatigue Lifetime of Welded Joints Under Random Loading - Colombini P., Dolinski K. - 2001Claudio RodriguesNo ratings yet
- 8.8 Boiler Efficiency TestDocument17 pages8.8 Boiler Efficiency TestRINJUNo ratings yet
- Materials Finer Than 75 - M (Nº 200) Sieve in Mineral Aggregates by WashingDocument3 pagesMaterials Finer Than 75 - M (Nº 200) Sieve in Mineral Aggregates by WashingEvert RiveraNo ratings yet
- ThermometryDocument29 pagesThermometryaelle00No ratings yet
- HW 3Document3 pagesHW 3Siva RamNo ratings yet
- How To Learn, by Simon Oxenham, 15 Feb. 2013: Learning MethodsDocument5 pagesHow To Learn, by Simon Oxenham, 15 Feb. 2013: Learning MethodsAnonymous Z1NYxC6hgYNo ratings yet
- Chapter1 Electrostatic 2016 ReviewedDocument98 pagesChapter1 Electrostatic 2016 ReviewedSyaza IzzatyNo ratings yet
- Sound Isolation 2017Document81 pagesSound Isolation 2017vartika guptaNo ratings yet
- Speed Velocity-Physics IGCSE NotesDocument4 pagesSpeed Velocity-Physics IGCSE Notesismun nadhifah100% (1)
- Technical DataDocument246 pagesTechnical DataABDUL GHAFOORNo ratings yet
- The Definite Integral and Its ApplicationsDocument13 pagesThe Definite Integral and Its Applicationsapi-312673653100% (1)
- Automatic Railway Gate Control by Using Microcontroller - 24 PagesDocument44 pagesAutomatic Railway Gate Control by Using Microcontroller - 24 PagesSebastin AshokNo ratings yet
- Tugas Metalurgi LasDocument16 pagesTugas Metalurgi LasMizan100% (2)
- Analysis and Design of Column: Chapter ThreeDocument23 pagesAnalysis and Design of Column: Chapter Threejebril yusufNo ratings yet
- R5 - FCC Main Fractionator: Process DataDocument24 pagesR5 - FCC Main Fractionator: Process Datanico123456789No ratings yet
- Boiling Point Pure SubstanceDocument20 pagesBoiling Point Pure SubstanceJay AlbaytarNo ratings yet
- Kids Math - Angles Glossary and TermsDocument7 pagesKids Math - Angles Glossary and Termssathish11407144No ratings yet
- Design of An Acoustic Anechoic Chamber For Application in Hearing Aid REsearchDocument6 pagesDesign of An Acoustic Anechoic Chamber For Application in Hearing Aid REsearchJude SudarioNo ratings yet
- HGV Gas Fuel Throttle ValveDocument41 pagesHGV Gas Fuel Throttle ValveSayayinNo ratings yet
- MS9483CDocument6 pagesMS9483CBryan MartinezNo ratings yet
- Laboratory Report - EvaporationDocument14 pagesLaboratory Report - EvaporationWayne Tandingan0% (1)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- A Welder’s Handbook to Robotic ProgrammingFrom EverandA Welder’s Handbook to Robotic ProgrammingRating: 5 out of 5 stars5/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (4)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionFrom EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionRating: 3.5 out of 5 stars3.5/5 (129)
- ChatGPT: The Future of Intelligent ConversationFrom EverandChatGPT: The Future of Intelligent ConversationRating: 3.5 out of 5 stars3.5/5 (8)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityFrom EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (3)
- Digital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSFrom EverandDigital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSNo ratings yet
- SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildFrom EverandSAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildRating: 5 out of 5 stars5/5 (5)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsFrom EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsRating: 5 out of 5 stars5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!From EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Rating: 3 out of 5 stars3/5 (1)
- Building with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksFrom EverandBuilding with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksNo ratings yet
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)From EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)No ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesFrom EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesRating: 5 out of 5 stars5/5 (2)
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityFrom EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityRating: 3.5 out of 5 stars3.5/5 (22)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet