You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lecture5 Data CompressionDocument20 pagesLecture5 Data CompressionAbdo ANNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- MPC SlidesDocument25 pagesMPC SlidesAndreeaNo ratings yet
- Sequential State Estimation in Nonlinear, Non Gaussian Dynamical SystemsDocument38 pagesSequential State Estimation in Nonlinear, Non Gaussian Dynamical SystemsaGWENo ratings yet
- Santander PDFDocument23 pagesSantander PDFJan DenefNo ratings yet
- EE 361 - Lecture - Week6 - 2Document30 pagesEE 361 - Lecture - Week6 - 2Erhan TombuloğluNo ratings yet
- Expected Values Expected Values: Alberto SuárezDocument6 pagesExpected Values Expected Values: Alberto SuárezVladimiro Ibañez QuispeNo ratings yet
- P-N EquationsDocument18 pagesP-N EquationsSelvi SelvarajNo ratings yet
- State Space Models and The Kalman FilterDocument49 pagesState Space Models and The Kalman FilterMohammadNo ratings yet
- TR Talk1n2 PDFDocument103 pagesTR Talk1n2 PDFOmprakash VermaNo ratings yet
- EECE 522 Notes - 09 CRLB Example - Single-Platform LocationDocument12 pagesEECE 522 Notes - 09 CRLB Example - Single-Platform LocationfsmmpNo ratings yet
- MCMC: Metropolis Hastings AlgorithmDocument5 pagesMCMC: Metropolis Hastings AlgorithmTamás MákosNo ratings yet
- ECE 6151, Spring 2017 Lecture Notes: 1 OutlineDocument7 pagesECE 6151, Spring 2017 Lecture Notes: 1 OutlineLam DinhNo ratings yet
- Signals and SystemsDocument14 pagesSignals and SystemsNaveen PeerlaNo ratings yet
- Kalman Filter and SmootherDocument9 pagesKalman Filter and SmootherBubu BibuNo ratings yet
- 05 Diff GeoDocument58 pages05 Diff GeoAymen HssainiNo ratings yet
- Neural Network Time SeriesDocument42 pagesNeural Network Time SeriesboynaduaNo ratings yet
- 06 Polynomial ChaosDocument47 pages06 Polynomial ChaosmonoNo ratings yet
- SMDDKLDMDKLDocument4 pagesSMDDKLDMDKLErikaNo ratings yet
- 1 Control Bachelor MathDocument31 pages1 Control Bachelor MathJamal awdiNo ratings yet
- Nonlinear Filtering - Extended Kalman Filter - Linearization and Random VariablesDocument12 pagesNonlinear Filtering - Extended Kalman Filter - Linearization and Random VariablesWajdi SadikNo ratings yet
- Artigo 2 Convexity Issues in System IdentificationDocument9 pagesArtigo 2 Convexity Issues in System IdentificationclaudyaneNo ratings yet
- Advanced Topics in Learning and VisionDocument26 pagesAdvanced Topics in Learning and VisionHemanth MNo ratings yet
- Review of Transforms: ECGR 6118 Computer Project: Transforms Student NameDocument25 pagesReview of Transforms: ECGR 6118 Computer Project: Transforms Student NameRyan HillNo ratings yet
- Vibration Analysis - Experimental Modal Analysis Guide-2Document84 pagesVibration Analysis - Experimental Modal Analysis Guide-2Yusuf Ihtiyaroğlu100% (1)
- Chapter Two Sampling and Reconstruction: Lecture #5Document26 pagesChapter Two Sampling and Reconstruction: Lecture #5yohannes woldemichaelNo ratings yet
- S&S - Week 10Document21 pagesS&S - Week 10machasong98No ratings yet
- Econ 512 Box Jenkins SlidesDocument31 pagesEcon 512 Box Jenkins SlidesMithilesh KumarNo ratings yet
- Lecture 9 - Physical Modeling Model and Parameter AccuracyDocument30 pagesLecture 9 - Physical Modeling Model and Parameter AccuracygabriveragNo ratings yet
- Classical 3Document3 pagesClassical 3damnationNo ratings yet
- Resistance Forms, Quasisymmetric Maps and Heat Kernel EstimatesDocument30 pagesResistance Forms, Quasisymmetric Maps and Heat Kernel EstimatesJorge PachasNo ratings yet
- FM6 11702Document2 pagesFM6 11702osorenegNo ratings yet
- Quantum Annealing Basics and : Hidetoshi NishimoriDocument35 pagesQuantum Annealing Basics and : Hidetoshi Nishimorifisica_musicaNo ratings yet
- Variatinal Quantum Algorithms Lesson 4Document17 pagesVariatinal Quantum Algorithms Lesson 4Ernesto CamposNo ratings yet
- Randomization of Affine Diffusion ProcessesDocument40 pagesRandomization of Affine Diffusion ProcessesBartosz BieganowskiNo ratings yet
- Lecture 8: Bayesian Estimation of Parameters in State Space ModelsDocument33 pagesLecture 8: Bayesian Estimation of Parameters in State Space ModelsTrinh VtnNo ratings yet
- Chapter 5Document117 pagesChapter 5Phan Mạnh TườngNo ratings yet
- M2042 Ch3 Vector DiffDocument27 pagesM2042 Ch3 Vector Difftedy yidegNo ratings yet
- Affine Processes and Applications in Finance: (With D. Duffie and W. Schachermayer)Document25 pagesAffine Processes and Applications in Finance: (With D. Duffie and W. Schachermayer)karasa1No ratings yet
- Stochastic Processes NotesDocument2 pagesStochastic Processes Notessakurai137No ratings yet
- MA111 Lec8 D3D4Document33 pagesMA111 Lec8 D3D4pahnhnykNo ratings yet
- Atoms in Strong Laser Fields: Lecture 2: Theoretical Methods IDocument12 pagesAtoms in Strong Laser Fields: Lecture 2: Theoretical Methods IRoy VeseyNo ratings yet
- Chapt 5Document41 pagesChapt 5francisco.g.plantier.rosaNo ratings yet
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Document10 pagesExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNo ratings yet
- Nonlinear Programming PDFDocument224 pagesNonlinear Programming PDFLina Angarita HerreraNo ratings yet
- DSPDocument46 pagesDSP呂政皓No ratings yet
- CS 563 Advanced Topics in Computer Graphics Monte Carlo Integration: Basic ConceptsDocument38 pagesCS 563 Advanced Topics in Computer Graphics Monte Carlo Integration: Basic ConceptsNeha SameerNo ratings yet
- FLUENT Modeling Unsteady FlowsDocument101 pagesFLUENT Modeling Unsteady Flows조기현100% (1)
- Lecture 6 - Spectrum Estimation PDFDocument47 pagesLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- Multivariable Calculus - Trouble With The Derivation of The Reynolds Transport Theorem - Mathematics Stack ExchangeDocument3 pagesMultivariable Calculus - Trouble With The Derivation of The Reynolds Transport Theorem - Mathematics Stack ExchangeAlberto IcazattiNo ratings yet
- Ch-8-Daa-Mb StudentsDocument27 pagesCh-8-Daa-Mb Students0101191713No ratings yet
- Computational Economics: Session 16: Numerical Dynamic ProgrammingDocument17 pagesComputational Economics: Session 16: Numerical Dynamic Programmingh_ebook8077No ratings yet
- Overview of Interest Rate ModelingDocument33 pagesOverview of Interest Rate ModelingcubanninjaNo ratings yet
- Gaussian Mixture Model and The EM Algorithm in Speech RecognitionDocument22 pagesGaussian Mixture Model and The EM Algorithm in Speech RecognitionMohammadNo ratings yet
- 1 Poisson Manifolds: Classical Mechanics, Lecture 8Document2 pages1 Poisson Manifolds: Classical Mechanics, Lecture 8bgiangre8372No ratings yet
- Modern Approaches To Stochastic Volatility CalibrationDocument43 pagesModern Approaches To Stochastic Volatility Calibrationhsch345No ratings yet
- Testing Residuals For White Noise in Time SeriesDocument16 pagesTesting Residuals For White Noise in Time Seriesali_alfaNo ratings yet
- 16 Higher Order Schemes - ADocument24 pages16 Higher Order Schemes - Aalagarg137691No ratings yet
- Numerical IntegrationDocument28 pagesNumerical IntegrationVincentLiangNo ratings yet
- Physics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETDocument36 pagesPhysics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETadityaNo ratings yet
- An Introduction To Numerical Methods For The Solutions of Partial Differential EquationsDocument12 pagesAn Introduction To Numerical Methods For The Solutions of Partial Differential EquationseiroNo ratings yet
- Atoms Molecules and IonsDocument78 pagesAtoms Molecules and IonszulqarnainkhaliqNo ratings yet
- Pendulum Lab 1Document3 pagesPendulum Lab 1Ashley AllenNo ratings yet
- Continuous Time Fourier Analysis: Level-1Document18 pagesContinuous Time Fourier Analysis: Level-1kalyanNo ratings yet
- Thomson BSA Grease BrochureDocument1 pageThomson BSA Grease BrochureElectromateNo ratings yet
- Recent Progress Toward A Three-Dimensional Unstructured Navier-Stokes Flow SolverDocument21 pagesRecent Progress Toward A Three-Dimensional Unstructured Navier-Stokes Flow SolverDanielle HaysNo ratings yet
- Rose Diagrams Intro PDFDocument3 pagesRose Diagrams Intro PDFMahmood MuftiNo ratings yet
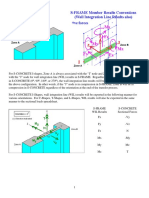
- Wall Integration Conventions S-CONCRETE R11 S-FRAMEDocument3 pagesWall Integration Conventions S-CONCRETE R11 S-FRAMESyed RaziuddinNo ratings yet
- Basf Masterseal 912 Tds PDFDocument2 pagesBasf Masterseal 912 Tds PDFDhananjay ShindeNo ratings yet
- ANSI-SMACNA 2006 HvacDuctStandardsDocument64 pagesANSI-SMACNA 2006 HvacDuctStandardsErica MorrisonNo ratings yet
- 2012, AAG, Tachi - Interactive Freeform Design of TensegrityDocument10 pages2012, AAG, Tachi - Interactive Freeform Design of TensegrityPierre ClrNo ratings yet
- Cable Element Analysis TechniquesDocument16 pagesCable Element Analysis TechniquesPankaj_Taneja_9684No ratings yet
- Dissertation Grosser 2012 PDFDocument359 pagesDissertation Grosser 2012 PDFPanos Sp0% (1)
- Electrical CircuitsDocument336 pagesElectrical CircuitspxppiezcNo ratings yet
- Luke Diosiek Fun With Electricity and MagnetismDocument21 pagesLuke Diosiek Fun With Electricity and MagnetismseablueNo ratings yet
- Process Control Servo SystemDocument16 pagesProcess Control Servo SystemCarlos RamirezNo ratings yet
- Math 112Document3 pagesMath 112janinasuzetteNo ratings yet
- Advanced Math SyllabusDocument2 pagesAdvanced Math Syllabusapi-232573717No ratings yet
- Flow Conditioning PLatesDocument8 pagesFlow Conditioning PLatesGeethaNo ratings yet
- "Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY FarmingdaleDocument15 pages"Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY Farmingdalehari prasadNo ratings yet
- Chapter 4Document49 pagesChapter 4Jakir HossainNo ratings yet
- Heat Transfer Operation 1118062019092802 PDFDocument7 pagesHeat Transfer Operation 1118062019092802 PDFChemical EngineeringNo ratings yet
- ME 41 SyllabusDocument1 pageME 41 SyllabusElisha TanNo ratings yet
- Chapter 7 - Quantization Noise in DSPDocument31 pagesChapter 7 - Quantization Noise in DSPSarah KumakoNo ratings yet
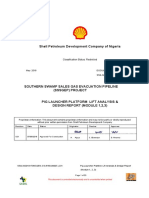
- SSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDocument53 pagesSSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDaniel Dambo100% (1)
- DEFUZZDocument43 pagesDEFUZZsunilkumareceNo ratings yet
- Buffer SelectionDocument3 pagesBuffer SelectionSandeep KumarNo ratings yet
- Kunii Levenspiel 1991Document6 pagesKunii Levenspiel 1991papapa14No ratings yet