You might also like
- Problemas resueltos de Hidráulica de CanalesFrom EverandProblemas resueltos de Hidráulica de CanalesRating: 4.5 out of 5 stars4.5/5 (7)
- Compresores de Audio - FinalDocument8 pagesCompresores de Audio - FinalLukana Marko Magne100% (1)
- Programacion de Videojuegos SDLDocument19 pagesProgramacion de Videojuegos SDLAnonymous HPFUTT88% (8)
- Problemas Clase ADocument13 pagesProblemas Clase AEdgar Andres Cevallos RamirezNo ratings yet
- PeugeotDocument30 pagesPeugeotאליהו אסתי אנדרדNo ratings yet
- Historia y Versiones ExcelDocument26 pagesHistoria y Versiones ExcelRegulo Mendez100% (4)
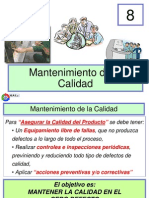
- Mantenimiento de La CalidadDocument45 pagesMantenimiento de La CalidadMarco Vargas90% (10)
- Ejercicio 4-5 - FoglerDocument8 pagesEjercicio 4-5 - FoglerBryan Anthony Aranda Castillo0% (1)
- Presentacion Curso Operación de Trenes Con PD LBDocument84 pagesPresentacion Curso Operación de Trenes Con PD LBAlcides R Sanchez Aponte100% (1)
- CLASE4-CONTROLII s4Document24 pagesCLASE4-CONTROLII s4martin caceres tupiaNo ratings yet
- Analisis Dimensional 5to de SecundariaDocument2 pagesAnalisis Dimensional 5to de SecundariaAlbert PuriNo ratings yet
- Laboratorio Circuito Integrador y DerivadorDocument22 pagesLaboratorio Circuito Integrador y DerivadorGalo CandelaNo ratings yet
- Reporte-8-ELECTRONICA BASICADocument8 pagesReporte-8-ELECTRONICA BASICAJuanDavidGarcíaNo ratings yet
- TP3 Arguello CristhianDocument5 pagesTP3 Arguello CristhianCriss ArguelloNo ratings yet
- Practica 9Document5 pagesPractica 9Arturo castillo calderonNo ratings yet
- Metodos de Discretizacion PDFDocument10 pagesMetodos de Discretizacion PDFoscar hernandezNo ratings yet
- Taller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFDocument26 pagesTaller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFJulian AlcalaNo ratings yet
- TACOU3.1.2 111 Diseño de Control PIDDocument17 pagesTACOU3.1.2 111 Diseño de Control PIDCarlos Alberto Medina LeonNo ratings yet
- CPI P03 Eq4Document10 pagesCPI P03 Eq4Bertin Cruz ValdesNo ratings yet
- Tarea 3 Control Analogo UNADDocument18 pagesTarea 3 Control Analogo UNADCamilo Rincón100% (2)
- Resumen ControlDocument11 pagesResumen ControlalexNo ratings yet
- Asignación Simulink - Ismael PalmaDocument23 pagesAsignación Simulink - Ismael PalmaVictorNo ratings yet
- II Examen de Mecanica de Fluidos II - 2021 - Solucion-1Document11 pagesII Examen de Mecanica de Fluidos II - 2021 - Solucion-1Christopher Carlos Villegas AchahuiNo ratings yet
- EL218 Unidad 4a Diseño de Compensadores 2023-2Document33 pagesEL218 Unidad 4a Diseño de Compensadores 2023-2Susan Nicold TapiaNo ratings yet
- EVALUACION 2-Controladores-IndustrialesDocument9 pagesEVALUACION 2-Controladores-IndustrialesAlexis JavierNo ratings yet
- Diagrama de Bloques - CRISTHIAN QUISPEDocument10 pagesDiagrama de Bloques - CRISTHIAN QUISPEBrian Condo RamosNo ratings yet
- Tarea de ControlDocument2 pagesTarea de ControlPezz Eel Pezz0% (1)
- Ejercicio 3.12: Ingeniería de Las Reacciones QuímicasDocument22 pagesEjercicio 3.12: Ingeniería de Las Reacciones QuímicasCecilia FernándezNo ratings yet
- Documento 21Document2 pagesDocumento 21Oscar Palacios HuicocheaNo ratings yet
- Parcial III Termodinamica I (03-2021) SolucionarioDocument7 pagesParcial III Termodinamica I (03-2021) SolucionarioMarcosNo ratings yet
- Discretizacion de ControladoresDocument9 pagesDiscretizacion de ControladoresRicardo Garzon MedinaNo ratings yet
- Examen Parcial Pasado1Document9 pagesExamen Parcial Pasado1Robinson Castillejo CamposNo ratings yet
- Tarea 3 Control AnalogoDocument18 pagesTarea 3 Control AnalogoCarlosParraNo ratings yet
- Informe Practica N°2Document11 pagesInforme Practica N°2JOSE ELIAS HUARCAYA CAJIALLANo ratings yet
- Compensador de Adelanto AtrasoDocument13 pagesCompensador de Adelanto AtrasoDiego AvalosNo ratings yet
- Funciones de Transferencia (MATLAB)Document27 pagesFunciones de Transferencia (MATLAB)GABI DANIELA LOPEZ PEREZNo ratings yet
- Calculo U Diseño de Sistema de Conduccion AbiertaDocument42 pagesCalculo U Diseño de Sistema de Conduccion AbiertaJoelNo ratings yet
- Amplificador en Fuente Común Del JFET Canal NDocument12 pagesAmplificador en Fuente Común Del JFET Canal NDaniel R.No ratings yet
- Informe Simulación. (04-06)Document20 pagesInforme Simulación. (04-06)Manuel CaceresNo ratings yet
- Taller Modelo Del Motor DCDocument13 pagesTaller Modelo Del Motor DCDavid Santiago Diaz MachadoNo ratings yet
- Formulario Intercambiadores de CalorDocument5 pagesFormulario Intercambiadores de CalorAna OchoaNo ratings yet
- Documento Tecnico 2Document38 pagesDocumento Tecnico 2Roberto Enrique PinedaNo ratings yet
- Informe 9 Grupo 6 PDFDocument17 pagesInforme 9 Grupo 6 PDFPAUL ESAU NARVAEZ GILERNo ratings yet
- CDP2P6E1Document7 pagesCDP2P6E1Luis Fernando Cortez PeñuelasNo ratings yet
- Taller 15% Segundo Corte Diseño Mecatronico Ii - 2Document55 pagesTaller 15% Segundo Corte Diseño Mecatronico Ii - 2roxanaNo ratings yet
- Lab.5 Diseño de Filtro DigitalDocument13 pagesLab.5 Diseño de Filtro DigitalAndres BelNo ratings yet
- PRACTICA .C.Reson - FiltrosDocument9 pagesPRACTICA .C.Reson - FiltrosCynthia FernandaNo ratings yet
- Presentación TP6 - 2022Document32 pagesPresentación TP6 - 2022Ariel GamarraNo ratings yet
- Laboratorio6 - Diseño - Control PIDDocument29 pagesLaboratorio6 - Diseño - Control PIDWilson MorochoNo ratings yet
- Trabajo Completo Control Primera FaseDocument66 pagesTrabajo Completo Control Primera FaseJuniior Cabrera BolivarNo ratings yet
- Preparaduría 19-05Document11 pagesPreparaduría 19-05Jubitza Maribel Izaguirre HernandezNo ratings yet
- Convertidor ReductorDocument9 pagesConvertidor ReductorSamir VegaNo ratings yet
- MCC Vs MCDDocument4 pagesMCC Vs MCDAdrian Reyes Galaviz100% (1)
- Informe Bomba de AguaDocument13 pagesInforme Bomba de AguaPaola Andrea GarciaNo ratings yet
- Chicaiza Alejandro LABEP PreparatorioP3 CorregidoDocument11 pagesChicaiza Alejandro LABEP PreparatorioP3 CorregidoAlejandro Sebastian Chicaiza TipanNo ratings yet
- Jeremy Chamba TareaOnOff.Document10 pagesJeremy Chamba TareaOnOff.Jeremy ChambaNo ratings yet
- LABORATORIODocument16 pagesLABORATORIOOSCAR VINICIO CHUQUITARCO LAGLANo ratings yet
- Ejercicios ReservoriosDocument9 pagesEjercicios ReservoriosEd Blady100% (1)
- Ramirez Alexis Preparatorio1aDocument19 pagesRamirez Alexis Preparatorio1aAlexis RamirezNo ratings yet
- Tercera Práctica Calificada de Control IDocument6 pagesTercera Práctica Calificada de Control Idaniel garcia garcia100% (1)
- Dinámica de SistemasDocument9 pagesDinámica de SistemasEmma MolinaNo ratings yet
- Ejercicio - 1 TAREA 1 CONTROL ANALOGICODocument5 pagesEjercicio - 1 TAREA 1 CONTROL ANALOGICODeimy TorresNo ratings yet
- Page 0256Document1 pagePage 0256MSANTOS RodriguezNo ratings yet
- Material AcripolDocument3 pagesMaterial AcripolSamaraFonnegraArangoNo ratings yet
- Diseño de Un Intercambiador de Calor TecsupDocument10 pagesDiseño de Un Intercambiador de Calor TecsupincubutNo ratings yet
- Tuberías de Polietileno de Alta DensidadDocument1 pageTuberías de Polietileno de Alta DensidadSantiago Loría NavaNo ratings yet
- Recuperación Vs LeyDocument6 pagesRecuperación Vs LeyCésar ChávezNo ratings yet
- Calculo de Un Condensador para Motor Monofasico de InduccionDocument2 pagesCalculo de Un Condensador para Motor Monofasico de InduccionJuan Guerrero LucianoNo ratings yet
- Universidad Distrital Francisco José de CaldasDocument10 pagesUniversidad Distrital Francisco José de CaldasDuvan MontañaNo ratings yet
- Trabajo Práctico #5Document2 pagesTrabajo Práctico #5Lean LeandroNo ratings yet
- Tesis Laboratorio - Preinforme 5 To Año Lubricantes Analisis IncompletoDocument63 pagesTesis Laboratorio - Preinforme 5 To Año Lubricantes Analisis IncompletoJose L CamaNo ratings yet
- Semana+11+y+12+ 7 Subestaciones+AéreasDocument26 pagesSemana+11+y+12+ 7 Subestaciones+AéreasYordi AlvitrezNo ratings yet
- DB2 IBM - Suplemento de Instalación y ConfiguraciónDocument590 pagesDB2 IBM - Suplemento de Instalación y ConfiguraciónHector100% (1)
- Trabajo Rio de RectaDocument1 pageTrabajo Rio de RectaOrlando Guevara CamposNo ratings yet
- DD022 CP CO Esp v2r0 PracticaDocument4 pagesDD022 CP CO Esp v2r0 PracticaBaltazar Flores MelinaNo ratings yet
- Hidrogeología Cuenca Río Caplina - Ing. Fluquer Peña LDocument46 pagesHidrogeología Cuenca Río Caplina - Ing. Fluquer Peña LCarlos VásquezNo ratings yet
- Hoja Tecnica Aislador MN3a GermerDocument1 pageHoja Tecnica Aislador MN3a GermerdarioNo ratings yet
- Rodrigo Cárdenas ChúDocument6 pagesRodrigo Cárdenas ChúRodrigo CárdenasNo ratings yet
- Partes Del EscritorioDocument3 pagesPartes Del Escritorioerik monrgaNo ratings yet
- UltrasonidoDocument7 pagesUltrasonidoAlexis Espinosa EspinosaNo ratings yet
- Laboratorio Accion de Una Enzima Presente en Tejidos Y Animales PDFDocument12 pagesLaboratorio Accion de Una Enzima Presente en Tejidos Y Animales PDFLuck LNNo ratings yet
- Proveedor Ritrama Couche Banano Spec 4-RL1B-06695 Esp.Document1 pageProveedor Ritrama Couche Banano Spec 4-RL1B-06695 Esp.ayrton carls zamora cardenasNo ratings yet
- Memoria Descriptiva para Expediente - QuilloalpaDocument70 pagesMemoria Descriptiva para Expediente - QuilloalpaJosue Jhonatan Porras BecerraNo ratings yet
- Extracion de Adn PDFDocument20 pagesExtracion de Adn PDFElizabeth Clorinda Huaman EleraNo ratings yet
- Carbonato de SodioDocument12 pagesCarbonato de SodioJuan José Solano CastilloNo ratings yet