You might also like
- Bicicletas para la ciudad: Una propuesta metodológica para el diagnóstico y la planeación de infraestructura ciclistaFrom EverandBicicletas para la ciudad: Una propuesta metodológica para el diagnóstico y la planeación de infraestructura ciclistaNo ratings yet
- Elementos básicos del sistema de transporteDocument41 pagesElementos básicos del sistema de transported4n1uNo ratings yet
- UF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasFrom EverandUF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasNo ratings yet
- TareaDocument11 pagesTareaRishtter Rafael Nuñez RodriguezNo ratings yet
- MF1464_2 - Atención e información a los viajeros del autobús o autocarFrom EverandMF1464_2 - Atención e información a los viajeros del autobús o autocarNo ratings yet
- Capitulo 3 - 4 Usuario y Seguridad VialDocument40 pagesCapitulo 3 - 4 Usuario y Seguridad VialAlex RegaladoNo ratings yet
- Los hábitos de movilidad en la Universitat de València (2005-2006): Problemas de acceso a los campus y sostenibilidadFrom EverandLos hábitos de movilidad en la Universitat de València (2005-2006): Problemas de acceso a los campus y sostenibilidadNo ratings yet
- Diapositiva Usuario Transito y TransporteDocument15 pagesDiapositiva Usuario Transito y TransporteEiner Felipe Mosquera RobledoNo ratings yet
- Trabajo de Vialidad 04-11Document4 pagesTrabajo de Vialidad 04-11Maria Fernanda ChaconNo ratings yet
- 6 - El Usuario en La Via PublicaDocument6 pages6 - El Usuario en La Via Publicafedetempo98No ratings yet
- Conductores, peatones y ciclistas: los usuarios del tránsitoDocument5 pagesConductores, peatones y ciclistas: los usuarios del tránsitoCRISTIAN SILVANo ratings yet
- Ensayo ING TRANSITODocument2 pagesEnsayo ING TRANSITONicolas CastroNo ratings yet
- Los Elementos Del Transito El UsuarioDocument16 pagesLos Elementos Del Transito El UsuarioBerthy Mayorga GarciaNo ratings yet
- 2° DPCC - Actividad #05 - V Und - 2023 ADocument6 pages2° DPCC - Actividad #05 - V Und - 2023 Amartinquez27No ratings yet
- Sistemas de TransportesDocument28 pagesSistemas de TransportesYamaichi Alex GRNo ratings yet
- 4 Proyecto GeometricoDocument73 pages4 Proyecto GeometricoAnonymous Z3sdNVNo ratings yet
- Elementos de Ingeniería de TransitoDocument134 pagesElementos de Ingeniería de Transitopapay050% (2)
- Asignacion 4 Ingenieria de TransitoDocument13 pagesAsignacion 4 Ingenieria de Transitojesus jimenezNo ratings yet
- Ingenieria de Transito y Transporte 3ra. ParteDocument9 pagesIngenieria de Transito y Transporte 3ra. ParteAngelParedesGNo ratings yet
- IDEAS CLAVES DE LA UNIDAD 1 de La E-Seguridad y Proteccion Ambiental EDocument13 pagesIDEAS CLAVES DE LA UNIDAD 1 de La E-Seguridad y Proteccion Ambiental Evictor aranaNo ratings yet
- Documento Sin TítuloDocument12 pagesDocumento Sin Títulojesushn0209No ratings yet
- El Usuario, El Peaton y El ConductorDocument9 pagesEl Usuario, El Peaton y El ConductorYameli RamosNo ratings yet
- TRÁNSITODocument6 pagesTRÁNSITOVladimirRojasBarriosNo ratings yet
- Curso Voluntario de Recupero de 4 PtosDocument74 pagesCurso Voluntario de Recupero de 4 PtosAngel de la SoledadNo ratings yet
- Clase 4 UsuarioDocument27 pagesClase 4 UsuariosamNo ratings yet
- Tarea TransitoDocument4 pagesTarea TransitoDomingo Tejada AlmonteNo ratings yet
- UNIDAD 2 Ingeniería de TRANSITODocument11 pagesUNIDAD 2 Ingeniería de TRANSITOmisaelNo ratings yet
- Evidencia CartillaDocument5 pagesEvidencia CartillaReynaldo Garces lunaNo ratings yet
- Vías 1 - Primer ParcialDocument21 pagesVías 1 - Primer ParcialDavid FernandoNo ratings yet
- Taller 3 Competencias Ciudadanas Seguridad VialDocument4 pagesTaller 3 Competencias Ciudadanas Seguridad VialAlexander TorresNo ratings yet
- Modulo (1) Seguridad Activa y Pasiva en Vias Conceptos BasicosDocument46 pagesModulo (1) Seguridad Activa y Pasiva en Vias Conceptos Basicosjuanburbano0% (1)
- Temas de Capacitacion en Seguridad Vial Tecnico Serna y CorreaDocument11 pagesTemas de Capacitacion en Seguridad Vial Tecnico Serna y CorreaMary CarNo ratings yet
- Guia de Usuario LobobiciDocument13 pagesGuia de Usuario LobobiciAngel Gustavo Cuahuey TepetlNo ratings yet
- 1b. TRANSITODocument24 pages1b. TRANSITOEnzoNo ratings yet
- Proyecto de Ppe Genesis Noemi Leon RonquilloDocument14 pagesProyecto de Ppe Genesis Noemi Leon RonquilloKatherine Moran100% (1)
- Técnicas Conducción MotocicletasDocument25 pagesTécnicas Conducción MotocicletasDaniel Roman CarrilloNo ratings yet
- Clasificacion Vehicular - PeruDocument169 pagesClasificacion Vehicular - PeruEdgardo AsmatNo ratings yet
- Documentos de TransitoDocument9 pagesDocumentos de TransitoJose LuisNo ratings yet
- Manual Relaciones HumanasDocument32 pagesManual Relaciones HumanasFabian Mixer DvjNo ratings yet
- Deber-3 - Contadores Automaticos Del TraficoDocument17 pagesDeber-3 - Contadores Automaticos Del TraficoCristian GuayanayNo ratings yet
- Repaso de Seguridad VialDocument8 pagesRepaso de Seguridad VialVanessa FelauherNo ratings yet
- Educación VialDocument10 pagesEducación VialMARCONo ratings yet
- Elementos de TransitoDocument16 pagesElementos de Transitopedro urreaNo ratings yet
- El UsuarioDocument35 pagesEl UsuarioJuan Manuel Silva LévanoNo ratings yet
- Teoria de La ConducciónDocument4 pagesTeoria de La ConducciónNena MuñozNo ratings yet
- Manual Digital Manejo SeguroDocument65 pagesManual Digital Manejo SeguroAndiNo ratings yet
- Proyecto de Educación Vial GYEDocument33 pagesProyecto de Educación Vial GYEJorge BravoNo ratings yet
- Normas de Educacion VialDocument29 pagesNormas de Educacion VialReinaldo Rene Pairumani PerezNo ratings yet
- Seguridad vial: Factores humano, vehicular y ambiental enDocument2 pagesSeguridad vial: Factores humano, vehicular y ambiental enFranchesca Villa33% (3)
- Competencia Ciudadana en Seguridad Vial: Aprendiz: Carlos Mojica NeiraDocument13 pagesCompetencia Ciudadana en Seguridad Vial: Aprendiz: Carlos Mojica Neiracarlos mojicaNo ratings yet
- Clase de Seguridad VialDocument18 pagesClase de Seguridad Vialisa.castro1993No ratings yet
- Ética y seguridad vialDocument42 pagesÉtica y seguridad vialJose valencia100% (2)
- Ingenieria de Transito Grupo N02Document26 pagesIngenieria de Transito Grupo N02Luis Aguilar RamirezNo ratings yet
- Cartilla CiclistasDocument15 pagesCartilla CiclistasErnesto Peña0% (1)
- FORMACION ETICA Y CIUDADANA Peaton y ConductorDocument5 pagesFORMACION ETICA Y CIUDADANA Peaton y ConductorJuaNo ratings yet
- Deberes y Derechos en La Vía PúblicaDocument11 pagesDeberes y Derechos en La Vía PúblicaKelly Yojana Poveda PatiñoNo ratings yet
- TEMA 1. Actividad II. Transito TerrestreDocument6 pagesTEMA 1. Actividad II. Transito TerrestreDaniela MontañoNo ratings yet
- Ética y seguridad vialDocument34 pagesÉtica y seguridad vialKalethJohanaArellanoNo ratings yet
- Seguridad Vial AXADocument40 pagesSeguridad Vial AXAJorge Eliecer Ortiz GualdronNo ratings yet
- Los 3 Elementos Básicos Que Componen La Ingeniería de Transito SonDocument3 pagesLos 3 Elementos Básicos Que Componen La Ingeniería de Transito SonSanti PerezNo ratings yet
- Licenciamiento UrbanísticoDocument43 pagesLicenciamiento UrbanísticoYeiver BaqueroNo ratings yet
- Taller de TransitoDocument6 pagesTaller de TransitoYeiver BaqueroNo ratings yet
- Diapo SenaDocument20 pagesDiapo SenaYeiver BaqueroNo ratings yet
- Proyecto de La Materia ProyectoDocument10 pagesProyecto de La Materia ProyectoYeiver BaqueroNo ratings yet
- Taller de TransitoDocument7 pagesTaller de TransitoYeiver BaqueroNo ratings yet
- Analisis de Flujo VehicularDocument7 pagesAnalisis de Flujo VehicularYeiver BaqueroNo ratings yet
- InterventoriaDocument6 pagesInterventoriaYeiver BaqueroNo ratings yet
- InterventoriaDocument6 pagesInterventoriaYeiver BaqueroNo ratings yet
- Electiva Ia IiiDocument4 pagesElectiva Ia IiiYeiver BaqueroNo ratings yet
- 2do Parcial Ingenieria de TransitoDocument10 pages2do Parcial Ingenieria de TransitoYeiver BaqueroNo ratings yet
- Electiva Ia IIIDocument4 pagesElectiva Ia IIIYeiver BaqueroNo ratings yet
- Transito ComponentesDocument1 pageTransito ComponentesYeiver BaqueroNo ratings yet
- Transito ComponentesDocument40 pagesTransito ComponentesYeiver BaqueroNo ratings yet
- Transito ComponentesDocument40 pagesTransito ComponentesYeiver BaqueroNo ratings yet
- Proyecto de La Materia ProyectoDocument37 pagesProyecto de La Materia ProyectoYeiver BaqueroNo ratings yet
- Proyecto de La Materia ProyectoDocument36 pagesProyecto de La Materia ProyectoYeiver BaqueroNo ratings yet
- Instalaciones JohanDocument4 pagesInstalaciones JohanYeiver BaqueroNo ratings yet
- Taller de TransitoDocument7 pagesTaller de TransitoYeiver BaqueroNo ratings yet
- Especificaciones técnicas y cantidades de obra para construcción de viviendasDocument8 pagesEspecificaciones técnicas y cantidades de obra para construcción de viviendasYeiver BaqueroNo ratings yet
- Cuaderno Ferroutage DefDocument26 pagesCuaderno Ferroutage DefkerneldNo ratings yet
- Patologías hormigón temprana edadDocument180 pagesPatologías hormigón temprana edadMariano PappalardiNo ratings yet
- Reglamento Nacional de Licencia de Conducir Vehículos Automotores y No Motorizados de Transporte TerrestreDocument18 pagesReglamento Nacional de Licencia de Conducir Vehículos Automotores y No Motorizados de Transporte TerrestreJesus Vargas100% (2)
- Cuestionario Clase B Examen Teórico de Conducción 1 de 2Document12 pagesCuestionario Clase B Examen Teórico de Conducción 1 de 2Luis MayNo ratings yet
- Minicargadora Bobcat S650Document2 pagesMinicargadora Bobcat S650Elvis Eberth Huanca Machaca100% (1)
- 10 Dinámica CircularDocument2 pages10 Dinámica Circularvladimir_reyes100% (2)
- KODIAQDocument33 pagesKODIAQSteveNo ratings yet
- Planficación de Rutas: Descripción Ruta Principal Ruta Ida Ruta RegresoDocument8 pagesPlanficación de Rutas: Descripción Ruta Principal Ruta Ida Ruta RegresoAyleenNo ratings yet
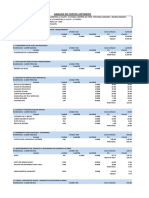
- Análisis de Costos UnitariosDocument3 pagesAnálisis de Costos UnitariosRosman Yober Ibañez GutierrezNo ratings yet
- Acta de Proyecto Linea 2Document10 pagesActa de Proyecto Linea 2JAIME ANTONIO PEREYRA SAHUARICONo ratings yet
- Pavimentos Informe 2Document8 pagesPavimentos Informe 2CesyLeticiaDíazRiveraNo ratings yet
- Revista Grupo A - Sto. DomDocument34 pagesRevista Grupo A - Sto. DomNinii M. MateoNo ratings yet
- Test ConducciónDocument4 pagesTest ConducciónsoniaNo ratings yet
- Memoria DescriptivaDocument10 pagesMemoria DescriptivaCarmenNo ratings yet
- Ingeniería de Tránsito - Capítulo 7, Dispositivos para El Control Del TránsitoDocument45 pagesIngeniería de Tránsito - Capítulo 7, Dispositivos para El Control Del TránsitoMinino_Mcfly100% (2)
- ERA-SIG-P-10A - Manual de Instalacion y Armado MP-68 - 1Document9 pagesERA-SIG-P-10A - Manual de Instalacion y Armado MP-68 - 1Milagros Ituza Revilla100% (1)
- Antecedentes Historicos de Las Carreteras en MéxicoDocument12 pagesAntecedentes Historicos de Las Carreteras en MéxicoMarco Antonio De León Morga92% (12)
- F219 Multas Transito VHM510 300428002Document1 pageF219 Multas Transito VHM510 300428002MariianaBelenNo ratings yet
- INFORMACIÓN LAS COLINAS DE SICAYA COMPLETO OkDocument3 pagesINFORMACIÓN LAS COLINAS DE SICAYA COMPLETO OkHugo GonzálesNo ratings yet
- El ideal panamericano y la Carretera PanamericanaDocument2 pagesEl ideal panamericano y la Carretera PanamericanaRubén NolascoNo ratings yet
- 4 Et Señaletica 2018Document17 pages4 Et Señaletica 2018OBRA PUBLICA NEALTICANNo ratings yet
- Generalidades - de - Los - Pavimentos 1Document11 pagesGeneralidades - de - Los - Pavimentos 1Kenny SalvadorNo ratings yet
- Carne Por PuntosDocument4 pagesCarne Por Puntosjonatan Ramos NúñezNo ratings yet
- Reorganización de la circulación en el campus de la UNNEDocument18 pagesReorganización de la circulación en el campus de la UNNEGuille AraujoNo ratings yet
- Procedimiento transporte carga pesadaDocument3 pagesProcedimiento transporte carga pesadajudy espinosaNo ratings yet
- Caracterizacion Del Amortiguador de Un VehiculoDocument4 pagesCaracterizacion Del Amortiguador de Un VehiculoJimmyFigueroaANo ratings yet
- Proyecto Via Parque RimacDocument16 pagesProyecto Via Parque RimacDaniel Arauco CarhuasNo ratings yet
- Escuelas ChinandegaDocument2 pagesEscuelas ChinandegaNorvin Josue BustamanteNo ratings yet
- Plan de Manejo DefensivoDocument8 pagesPlan de Manejo DefensivoJuan Carlos ValienteNo ratings yet
- Ley #25456 - Luces BajasDocument1 pageLey #25456 - Luces Bajasgoniniariel1008100% (2)