You might also like
- Recessional - ChordsDocument1 pageRecessional - ChordsNick RivieraNo ratings yet
- Go Tell It On The Mountain - ChordsDocument2 pagesGo Tell It On The Mountain - ChordsNick RivieraNo ratings yet
- Silent Night - ChordsDocument1 pageSilent Night - ChordsNick RivieraNo ratings yet
- How Great Thou Art - ChordsDocument1 pageHow Great Thou Art - ChordsNick RivieraNo ratings yet
- O Come All Ye FaithfulDocument1 pageO Come All Ye FaithfulNick RivieraNo ratings yet
- Prac UnixDocument14 pagesPrac UnixNick RivieraNo ratings yet
- The Wedding March - ChordsDocument1 pageThe Wedding March - ChordsNick RivieraNo ratings yet
- S120 3party Motors Sys Man 0419 en-USDocument200 pagesS120 3party Motors Sys Man 0419 en-USNick RivieraNo ratings yet
- S120 Safety FCT Man 0620 en-USDocument432 pagesS120 Safety FCT Man 0620 en-USNick RivieraNo ratings yet
- Joy To The World - ChordsDocument1 pageJoy To The World - ChordsNick RivieraNo ratings yet
- en-USDocument560 pagesen-USNick RivieraNo ratings yet
- SINAMICS G130 G150 S120 Chassis S120 CM S150 Safety Integrated en-USDocument108 pagesSINAMICS G130 G150 S120 Chassis S120 CM S150 Safety Integrated en-USNick RivieraNo ratings yet
- DontletthesungodownDocument1 pageDontletthesungodownNick RivieraNo ratings yet
- Tesms 2302Document2 pagesTesms 2302Nick RivieraNo ratings yet
- LH1 1204 enDocument980 pagesLH1 1204 enNick RivieraNo ratings yet
- s120 Starter Getting Started 1117 en-USDocument62 pagess120 Starter Getting Started 1117 en-USNick RivieraNo ratings yet
- Silent Night - Bsharp-TricksDocument2 pagesSilent Night - Bsharp-TricksNick RivieraNo ratings yet
- Saber Electronica - SE349Document1 pageSaber Electronica - SE349Nick RivieraNo ratings yet
- French GrammarDocument31 pagesFrench GrammarNick RivieraNo ratings yet
- Lenovo Thinpad T14 Gen3Document2 pagesLenovo Thinpad T14 Gen3Nick RivieraNo ratings yet
- KUKA Robots For High PayloadsDocument32 pagesKUKA Robots For High PayloadsNick RivieraNo ratings yet
- Logitech TX Schematic 285022Document1 pageLogitech TX Schematic 285022Nick RivieraNo ratings yet
- YOUR SONG - Elton JohnDocument2 pagesYOUR SONG - Elton JohnNick RivieraNo ratings yet
- s120 Line Infeed en PDFDocument174 pagess120 Line Infeed en PDFNick RivieraNo ratings yet
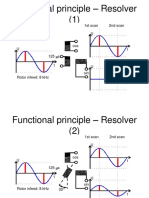
- Resolver Functional PrincipleDocument8 pagesResolver Functional PrincipleNick RivieraNo ratings yet
- Shunk Opr 176Document4 pagesShunk Opr 176Nick RivieraNo ratings yet
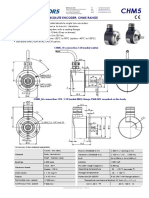
- Encoder Absoluto BEI-IDEACOD CHM5Document2 pagesEncoder Absoluto BEI-IDEACOD CHM5Nick RivieraNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Alvarion WiMAX End User DevicesDocument8 pagesAlvarion WiMAX End User DevicesjessenierinNo ratings yet
- Microcontrollers - 8051 InterruptsDocument2 pagesMicrocontrollers - 8051 InterruptsrajeshNo ratings yet
- SECPDS - 005 - EN-1802 - Arbor SightlineDocument3 pagesSECPDS - 005 - EN-1802 - Arbor SightlinekikecfNo ratings yet
- SRS-Design and ImplementationDocument25 pagesSRS-Design and ImplementationShekhar Imvu0% (1)
- Mega Guide CCNA 640-802Document182 pagesMega Guide CCNA 640-802wolf1313No ratings yet
- Lab Manual: Mohan's Networking Institute - 1Document87 pagesLab Manual: Mohan's Networking Institute - 1Sankarakrishnan_vNo ratings yet
- How To Install Android Multi Tools v1.02b 2019 Pattern - Password Remover (Latest Version)Document1 pageHow To Install Android Multi Tools v1.02b 2019 Pattern - Password Remover (Latest Version)Anonymous oZ18ajaaNo ratings yet
- Extreme S Series DSDocument18 pagesExtreme S Series DSManohar KothandaramanNo ratings yet
- César Andrés Gerace: iOS DeveloperDocument12 pagesCésar Andrés Gerace: iOS DeveloperAndres GeraceNo ratings yet
- Cp341 eDocument238 pagesCp341 ePaulo HardyNo ratings yet
- MTS2 - An4 05 014R2Document4 pagesMTS2 - An4 05 014R2sotakasNo ratings yet
- ICT Premium Products Passwords SY 2019-2020Document8 pagesICT Premium Products Passwords SY 2019-2020Dharen Job CornelioNo ratings yet
- DT-200 Bluewave2 Operators GuideDocument8 pagesDT-200 Bluewave2 Operators GuideDragan KocijasevicNo ratings yet
- Important Points To Note PE1-PE2Document3 pagesImportant Points To Note PE1-PE2Debaki Nandan SamalNo ratings yet
- Cisco 3800 SeriesDocument12 pagesCisco 3800 Seriessankifko100% (1)
- S8 - S16 Datasheet PDFDocument2 pagesS8 - S16 Datasheet PDFagungcomlNo ratings yet
- Au Python PDFDocument8 pagesAu Python PDFIsmael Ferreras HerreraNo ratings yet
- TSMDocument16 pagesTSMArunKumarNo ratings yet
- AWS Disaster RecoveryDocument56 pagesAWS Disaster Recoverybal_thakre100% (2)
- Chapter 3: The PIC MicrocontrollersDocument16 pagesChapter 3: The PIC MicrocontrollersBernard Maacaron100% (1)
- TituloDocument5 pagesTituloDiego LaiNo ratings yet
- Advant Controller 160Document4 pagesAdvant Controller 160BMNo ratings yet
- New Model 73 Series From JenwayDocument19 pagesNew Model 73 Series From JenwayThys MoutonNo ratings yet
- Power Focus Quick Guide UKDocument48 pagesPower Focus Quick Guide UKAkaridNo ratings yet
- Penetration Testing ReportDocument19 pagesPenetration Testing ReportAli Shan100% (1)
- Simulink Basics For Engineering Applications: Ashok Krishnamurthy and Siddharth SamsiDocument36 pagesSimulink Basics For Engineering Applications: Ashok Krishnamurthy and Siddharth SamsiAvinash DalwaniNo ratings yet
- Python GUI Programming Cookbook - Sample ChapterDocument27 pagesPython GUI Programming Cookbook - Sample ChapterPackt Publishing86% (7)
- 3rd Class-Computer SA&FADocument22 pages3rd Class-Computer SA&FAhiraNo ratings yet
- Masibus DDU-XX R1F 0815 Digital Display UnitDocument4 pagesMasibus DDU-XX R1F 0815 Digital Display UnitPOWERGRID TRICHYNo ratings yet
- Matched FilterDocument30 pagesMatched FilterLavanya GangadharanNo ratings yet