You might also like
- An Elf and An Orc Had A Little Baby Parentage and Upbringing in D&DDocument113 pagesAn Elf and An Orc Had A Little Baby Parentage and Upbringing in D&DGeorge73% (11)
- Burglary and Robbery Prevention RetailDocument13 pagesBurglary and Robbery Prevention RetailMarcelo MartinezNo ratings yet
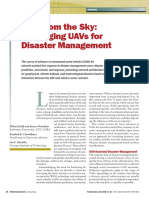
- Help From The Sky: Leveraging Uavs For Disaster ManagementDocument9 pagesHelp From The Sky: Leveraging Uavs For Disaster ManagementMuhammad RifkiNo ratings yet
- Silva Lambe and Marr (2008) - Probability and Risk of Slope FailureDocument9 pagesSilva Lambe and Marr (2008) - Probability and Risk of Slope FailureszarnaniNo ratings yet
- Collins Birds of The World PDFDocument529 pagesCollins Birds of The World PDFVangelis100% (3)
- Stiletto Presentation2Document44 pagesStiletto Presentation2Marcelo MartinezNo ratings yet
- A Comparison Between Safe Life Damage Tolerance AnDocument13 pagesA Comparison Between Safe Life Damage Tolerance AnIqbal MuhammadNo ratings yet
- Future NavyDocument23 pagesFuture NavyMarcelo MartinezNo ratings yet
- Lecture Poultry Chicken NC IiDocument34 pagesLecture Poultry Chicken NC IiNichole Kyla Enriquez100% (1)
- Parelhoenders in Handbook of The Birds of The World 01Document21 pagesParelhoenders in Handbook of The Birds of The World 01Alyssa LeonidoNo ratings yet
- Business Plan For PoultaryDocument6 pagesBusiness Plan For PoultaryBudhathoki Yoshiko100% (1)
- Testing Reading-A2+Document88 pagesTesting Reading-A2+biruta2No ratings yet
- BirdmanDocument14 pagesBirdmanEuston ChinharaNo ratings yet
- Value at Risk Perspective On LOPA (2007)Document7 pagesValue at Risk Perspective On LOPA (2007)Gli OxalNo ratings yet
- Autonomous Bird Deterrent System For Vineyards Using Multiple Bio-Inspired Unmanned Aerial VehicleDocument6 pagesAutonomous Bird Deterrent System For Vineyards Using Multiple Bio-Inspired Unmanned Aerial VehicleWilliamNo ratings yet
- Conference Paper Zi HaoDocument7 pagesConference Paper Zi HaoLady Katherine Gomez SamboniNo ratings yet
- Secure Localization Using PSO and GD Methods For Under Water Wireless Sensor Networks A Research ProposalDocument11 pagesSecure Localization Using PSO and GD Methods For Under Water Wireless Sensor Networks A Research ProposalManjunath YadavNo ratings yet
- Process Safety Progress - 2020 - Mander - Current State of The Practice For Facility Siting StudiesDocument13 pagesProcess Safety Progress - 2020 - Mander - Current State of The Practice For Facility Siting StudiesJinyoung ChoiNo ratings yet
- Inspection PipelineDocument12 pagesInspection PipelineHedi Ben MohamedNo ratings yet
- Sizing The Protection Devices To Control Water Hammer DamageDocument6 pagesSizing The Protection Devices To Control Water Hammer DamageT. LimNo ratings yet
- Prime D 23 00769 - R1Document49 pagesPrime D 23 00769 - R1omorenaNo ratings yet
- An Offshore Risk Analysis Method Using Fuzzy Bayesian NetworkDocument12 pagesAn Offshore Risk Analysis Method Using Fuzzy Bayesian NetworkDenis TsoupisNo ratings yet
- PDFDocument8 pagesPDFajefniNo ratings yet
- Remaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors RegressionDocument12 pagesRemaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors RegressionPradeep KunduNo ratings yet
- Tripod-BETA Incident Investigation and AnalysisDocument10 pagesTripod-BETA Incident Investigation and AnalysisAbdou BencheikhNo ratings yet
- Ada Programs: UsingDocument12 pagesAda Programs: UsingAlankrit PatnaikNo ratings yet
- Carpi 2010Document7 pagesCarpi 2010Lonely RenlyNo ratings yet
- Are Mariner Near Misses Influencing Design?: K. Mcsweeney, B. Craig, J. Curry, and W. ZhuDocument5 pagesAre Mariner Near Misses Influencing Design?: K. Mcsweeney, B. Craig, J. Curry, and W. Zhubandar2No ratings yet
- Sustainability 13 13542 v2Document19 pagesSustainability 13 13542 v2ChrisHang DuNo ratings yet
- Unmanned Aircraft Systems As A New Source of Disturbance For Wildlife: A Systematic ReviewDocument14 pagesUnmanned Aircraft Systems As A New Source of Disturbance For Wildlife: A Systematic ReviewEuston ChinharaNo ratings yet
- BrachytherapyDocument4 pagesBrachytherapyJerejayme AvenidoNo ratings yet
- Safety-Instrumented Systems Focus On Measurement Diagnostics - CE - Apr 2013Document6 pagesSafety-Instrumented Systems Focus On Measurement Diagnostics - CE - Apr 2013onizuka-t2263No ratings yet
- 1 s2.0 S2352146521009662 MainDocument8 pages1 s2.0 S2352146521009662 Mainjames danicaNo ratings yet
- 1 s2.0 S0378779614001023 MainDocument7 pages1 s2.0 S0378779614001023 Mainmeera vattamkulamNo ratings yet
- Sizing The Protection Devices To Control Water Hammer DamageDocument7 pagesSizing The Protection Devices To Control Water Hammer DamageAs VilankNo ratings yet
- Intelligent Approach Based On Random Forest For Safety Risk Prediction of Deep Foundation Pit in Subway StationsDocument14 pagesIntelligent Approach Based On Random Forest For Safety Risk Prediction of Deep Foundation Pit in Subway StationsAlberto Astorayme ValenzuelaNo ratings yet
- 1 s2.0 S0951832021003410 MainDocument12 pages1 s2.0 S0951832021003410 MainmkNo ratings yet
- NASA: 70857main FS-2000-02-47-LaRCDocument1 pageNASA: 70857main FS-2000-02-47-LaRCNASAdocumentsNo ratings yet
- HenryDocument18 pagesHenrySultan DwierNo ratings yet
- Rethinking Supply Chain Risk Analysis - Common Flaws & Main ElementsDocument23 pagesRethinking Supply Chain Risk Analysis - Common Flaws & Main ElementsAgnes Putri NurkubaisNo ratings yet
- A Machine Learning Integrated 5.8-GHz Continuous-Wave Radar For Honeybee Monitoring and Behavior ClassificationDocument11 pagesA Machine Learning Integrated 5.8-GHz Continuous-Wave Radar For Honeybee Monitoring and Behavior ClassificationChandra KanthNo ratings yet
- 006 Kaced2021Document9 pages006 Kaced2021gabrielNo ratings yet
- Fmea at Radiographic Testing PDFDocument10 pagesFmea at Radiographic Testing PDFDaniel Matinez EsquivelNo ratings yet
- Similarity Analysis of Industrial Alarm FloodDocument6 pagesSimilarity Analysis of Industrial Alarm FloodrezwanNo ratings yet
- Similarity Analysis of Industrial Alarm Flood DataDocument6 pagesSimilarity Analysis of Industrial Alarm Flood DatarezwanNo ratings yet
- (Doi 10.2118 - 39727-MS) Harmony, Kunu - (Society of Petroleum Engineers SPE Asia Pacific Conference On Integrated Modelling For Asset Management - Kuala Lumpur, MalaysDocument13 pages(Doi 10.2118 - 39727-MS) Harmony, Kunu - (Society of Petroleum Engineers SPE Asia Pacific Conference On Integrated Modelling For Asset Management - Kuala Lumpur, MalaysTălmaciu BiancaNo ratings yet
- Adaptation in Load Shedding Under Vulnerable Operating ConditionsDocument7 pagesAdaptation in Load Shedding Under Vulnerable Operating ConditionsRogerthat66 RogerNo ratings yet
- A Pythagorean-Type Fuzzy Deep Denoising Autoencoder For Industrial Accident Early WarningDocument15 pagesA Pythagorean-Type Fuzzy Deep Denoising Autoencoder For Industrial Accident Early WarningGonzaloNo ratings yet
- Aerospace 06 00019 v2Document20 pagesAerospace 06 00019 v2Adik AlmataevNo ratings yet
- J Microrel 2007 02 014Document8 pagesJ Microrel 2007 02 014Yusup SiswoharjonoNo ratings yet
- Advanced Modelling of Bird Strike On High Lift Devices Using Hybrid PDFDocument9 pagesAdvanced Modelling of Bird Strike On High Lift Devices Using Hybrid PDFpreethaNo ratings yet
- J Strusafe 2013 01 005Document9 pagesJ Strusafe 2013 01 005Alejandro Duvan Lopez RojasNo ratings yet
- Key Risk Factors Affecting Electrical Safety in Hazardous ClassiDocument10 pagesKey Risk Factors Affecting Electrical Safety in Hazardous ClassiNikorn SornpromNo ratings yet
- Ecological Modelling: Wenchong Tian, Zhenliang Liao, Jin ZhangDocument11 pagesEcological Modelling: Wenchong Tian, Zhenliang Liao, Jin ZhangAlfredo Quispe LujanoNo ratings yet
- 1 Milazzo EtalDocument5 pages1 Milazzo EtalGilang ArdiNo ratings yet
- A Datadriven Predictive Maintenance Model To Estimate RUL in A Multirotor UASInternational Journal of Micro Air VehiclesDocument14 pagesA Datadriven Predictive Maintenance Model To Estimate RUL in A Multirotor UASInternational Journal of Micro Air VehiclesClovis NetoNo ratings yet
- Structural Health Monitoring of Aluminum Plate Using Acoustic SensorsDocument10 pagesStructural Health Monitoring of Aluminum Plate Using Acoustic SensorsMalolan VasudevanNo ratings yet
- A System Using Artificial Intelligence To Detect and Scare BirdDocument16 pagesA System Using Artificial Intelligence To Detect and Scare BirdAbdussalam Ibrahim MagawataNo ratings yet
- Optical Tracking and Laser Induced Mortality of Insects During FlightDocument11 pagesOptical Tracking and Laser Induced Mortality of Insects During FlighttareghNo ratings yet
- Comparison of Techniques For Accident Scenario Analysis in Hazardous SystemsDocument9 pagesComparison of Techniques For Accident Scenario Analysis in Hazardous SystemsSung Woo ShinNo ratings yet
- Progress in Aerospace Sciences: Umair Ahmed, Fakhre Ali, Ian JennionsDocument24 pagesProgress in Aerospace Sciences: Umair Ahmed, Fakhre Ali, Ian JennionsSuman BajracharyaNo ratings yet
- Hydrologic Applications of MRAN AlgorithmDocument7 pagesHydrologic Applications of MRAN AlgorithmBharath ykNo ratings yet
- Risk-Based Inspection and Maintenance (RBIM) (Khan-Canada-2004)Document14 pagesRisk-Based Inspection and Maintenance (RBIM) (Khan-Canada-2004)juan diazNo ratings yet
- Fabrication of Bird Repeller For Agriculture PurposesDocument8 pagesFabrication of Bird Repeller For Agriculture PurposesIJRASETPublicationsNo ratings yet
- Electric Power Systems ResearchDocument12 pagesElectric Power Systems ResearchGheorghe HaziNo ratings yet
- Iaea 2001 - Risk Informed Decision MakingDocument37 pagesIaea 2001 - Risk Informed Decision MakingOtso CronvallNo ratings yet
- (2016-A.mensah) Efficient Resilience Assessment Framework For Electric Power Systems Affected by Hurricane EventsDocument10 pages(2016-A.mensah) Efficient Resilience Assessment Framework For Electric Power Systems Affected by Hurricane EventsJQQNo ratings yet
- Annals of Nuclear Energy: Gopika Vinod, Pavan K. Sharma, T.V. Santosh, M. Hari Prasad, K.K. VazeDocument7 pagesAnnals of Nuclear Energy: Gopika Vinod, Pavan K. Sharma, T.V. Santosh, M. Hari Prasad, K.K. VazeJude OkoyeNo ratings yet
- Risk Importance Measures in the Design and Operation of Nuclear Power PlantsFrom EverandRisk Importance Measures in the Design and Operation of Nuclear Power PlantsNo ratings yet
- Aerodynamic Heating" SyllabusDocument3 pagesAerodynamic Heating" SyllabusMarcelo MartinezNo ratings yet
- Cone Angle Choices For Atmospheric Entry Vehicles: A ReviewDocument14 pagesCone Angle Choices For Atmospheric Entry Vehicles: A ReviewMarcelo MartinezNo ratings yet
- Classification of Flows Applied Computational Fluid DynamicsDocument32 pagesClassification of Flows Applied Computational Fluid DynamicsMarcelo MartinezNo ratings yet
- Christopher J. Miller, Jeb S. Orr, Curtis E. Hanson, Eric T. GilliganDocument12 pagesChristopher J. Miller, Jeb S. Orr, Curtis E. Hanson, Eric T. GilliganMarcelo MartinezNo ratings yet
- Karman Institute: For Fluid DynamicsDocument27 pagesKarman Institute: For Fluid DynamicsMarcelo MartinezNo ratings yet
- Body-Fin Aerodynamic Interference For Low Aspect Ratio MissilesDocument10 pagesBody-Fin Aerodynamic Interference For Low Aspect Ratio MissilesMarcelo MartinezNo ratings yet
- Da RK: Simplified Aerodynamic Heating of RocketsDocument18 pagesDa RK: Simplified Aerodynamic Heating of RocketsMarcelo MartinezNo ratings yet
- An International Review of The STANAG 4496, Fragment Impact TestDocument21 pagesAn International Review of The STANAG 4496, Fragment Impact TestMarcelo MartinezNo ratings yet
- Aerodynamics Lecture Notes: Aerospace Engineer (P.HD) Nuclear Spacecraft Propulsion SpecialistDocument70 pagesAerodynamics Lecture Notes: Aerospace Engineer (P.HD) Nuclear Spacecraft Propulsion SpecialistMarcelo MartinezNo ratings yet
- STANAG 4241 Review of The Bullet Impact Test: IMEMTS 2013 - San Diego, CA, USADocument22 pagesSTANAG 4241 Review of The Bullet Impact Test: IMEMTS 2013 - San Diego, CA, USAMarcelo MartinezNo ratings yet
- Solutions: CommitmentDocument42 pagesSolutions: CommitmentMarcelo MartinezNo ratings yet
- Insensitive Enhanced Blast Formulations: P.Chabin, B.Nouguez, B.Mahé EURENCO C.Collet, SME JM - Lesprit, A.Nouel MBDA/FDocument18 pagesInsensitive Enhanced Blast Formulations: P.Chabin, B.Nouguez, B.Mahé EURENCO C.Collet, SME JM - Lesprit, A.Nouel MBDA/FMarcelo MartinezNo ratings yet
- TEMPER Simulations of MCX-6100 Filled 155 MM ShellDocument49 pagesTEMPER Simulations of MCX-6100 Filled 155 MM ShellMarcelo MartinezNo ratings yet
- Experimental Set-Up and Results of The Process of Co-Extruded Perforated Gun PropellantsDocument17 pagesExperimental Set-Up and Results of The Process of Co-Extruded Perforated Gun PropellantsMarcelo MartinezNo ratings yet
- On The Definition of Propellant Force: SciencedirectDocument4 pagesOn The Definition of Propellant Force: SciencedirectMarcelo MartinezNo ratings yet
- Ballistics Trajectory and Impact Analysis For Fragment Impact Testing Insensitive Munitions and Hazard Classification Project CriteriaDocument6 pagesBallistics Trajectory and Impact Analysis For Fragment Impact Testing Insensitive Munitions and Hazard Classification Project CriteriaMarcelo MartinezNo ratings yet
- Defence Technology: Lemi Türker, Serhat VarisDocument7 pagesDefence Technology: Lemi Türker, Serhat VarisMarcelo MartinezNo ratings yet
- A 227715Document116 pagesA 227715Marcelo MartinezNo ratings yet
- Csit89708 PDFDocument11 pagesCsit89708 PDFMarcelo MartinezNo ratings yet
- Applications of Radio Frequency Identification (RFID) in Mining IndustriesDocument6 pagesApplications of Radio Frequency Identification (RFID) in Mining IndustriesMarcelo MartinezNo ratings yet
- The Considerations of Developing and Implementing An It System To Track and Trace Explosives in The South African MarketDocument14 pagesThe Considerations of Developing and Implementing An It System To Track and Trace Explosives in The South African MarketMarcelo MartinezNo ratings yet
- Agricultural Structures - Housing For Broiler Production: PAES 402:2001Document66 pagesAgricultural Structures - Housing For Broiler Production: PAES 402:2001JOEZEL ENTIENZANo ratings yet
- The Honey BadgerDocument1 pageThe Honey BadgerPeggy Carter (Duckie)No ratings yet
- TVL - Afaappc9-12Ebc-Iva-C-47: Afa-Poultry Production NC Ii FourthDocument4 pagesTVL - Afaappc9-12Ebc-Iva-C-47: Afa-Poultry Production NC Ii FourthJesa A. Linda DemaisipNo ratings yet
- Getachew FinalDocument33 pagesGetachew FinalKidanu Tilahun100% (2)
- Bison Fur / Hair LandDocument53 pagesBison Fur / Hair LandArlene Abriza PunioNo ratings yet
- Latvia Birding Trip ReportDocument24 pagesLatvia Birding Trip ReportAWBirderNo ratings yet
- Influence of in Ovo Arginine Feeding On Hatching Traits and Post-Hatch Performance of FUNAAB-Alpha Chickens in Two Housing Types PDFDocument9 pagesInfluence of in Ovo Arginine Feeding On Hatching Traits and Post-Hatch Performance of FUNAAB-Alpha Chickens in Two Housing Types PDFKarrar Al-shammariNo ratings yet
- Leta Jima Desta Research WorkDocument17 pagesLeta Jima Desta Research Workleta jimaNo ratings yet
- Breeder Review IHPDocument7 pagesBreeder Review IHPGopi MarappanNo ratings yet
- Class - 9 - Assignment - 1 - 2023-24Document47 pagesClass - 9 - Assignment - 1 - 2023-24Sinchani SilNo ratings yet
- Pigeons: Animal SciencesDocument15 pagesPigeons: Animal SciencesSafi Ul RehmanNo ratings yet
- Report TeksDocument9 pagesReport TeksAmelia SabrinaNo ratings yet
- Damage Caused by Birds and Rodent in Field Crops and Their - LibreDocument3 pagesDamage Caused by Birds and Rodent in Field Crops and Their - LibrejezzaNo ratings yet
- Tecno Brochure Voliere 231012 Eng LowDocument24 pagesTecno Brochure Voliere 231012 Eng LowGman00No ratings yet
- Reglas - de Juego - WingspanDocument12 pagesReglas - de Juego - Wingspanblue wolfNo ratings yet
- Life Cycles of Animals ExerciseDocument4 pagesLife Cycles of Animals ExerciseTara esaNo ratings yet
- How Development Changes Bird Communities: Slower Population Growth Would Benefit People, Birds, and ClimateDocument8 pagesHow Development Changes Bird Communities: Slower Population Growth Would Benefit People, Birds, and ClimateMadison Audubon SocietyNo ratings yet
- Commercial Layers: Management GuideDocument43 pagesCommercial Layers: Management GuidemarcmaxNo ratings yet
- NAT Reviewer On AnimalsDocument7 pagesNAT Reviewer On Animalsjustine alinaNo ratings yet
- Galapagos Dove ResearchDocument2 pagesGalapagos Dove Researchapi-448112988No ratings yet
- #11 References PDFDocument76 pages#11 References PDFMelissa DawnNo ratings yet
- Essay On The Arctic TernDocument4 pagesEssay On The Arctic TernaftabNo ratings yet
- Practice TestDocument10 pagesPractice TestPhương Nhi NguyễnNo ratings yet
- Hamara Farmer - Broiler Manual 2019Document23 pagesHamara Farmer - Broiler Manual 2019moyopresley1993No ratings yet