You might also like
- Costo y Procedimientos de Reparación Por Soldadura Revestimientos DurosDocument55 pagesCosto y Procedimientos de Reparación Por Soldadura Revestimientos DurosLuz Ileana Pascual100% (2)
- Ficha Tecnica Alcord 5 SiDocument1 pageFicha Tecnica Alcord 5 SiMartin Gomez RNo ratings yet
- SIMBOLOGIA DE SOLDADURA EN EL PROCESO GMAW Y FCAW - (Luis Mercado) PDFDocument10 pagesSIMBOLOGIA DE SOLDADURA EN EL PROCESO GMAW Y FCAW - (Luis Mercado) PDFleidy canoNo ratings yet
- Swagelok Conectores PDFDocument16 pagesSwagelok Conectores PDFAbraham Mora ReyesNo ratings yet
- Metodologia para Reconstruccion de Eje Aisi 1045 Por SoldADURADocument111 pagesMetodologia para Reconstruccion de Eje Aisi 1045 Por SoldADURAAlex Vasquez100% (1)
- Designacion de RodamientosDocument2 pagesDesignacion de RodamientosAlvaroMaussaCaballeroNo ratings yet
- Selección de Acoplamiento VulkanDocument1 pageSelección de Acoplamiento VulkanAlex Xavier Malasquez LeónNo ratings yet
- ChaveterosDocument1 pageChaveterospitcabNo ratings yet
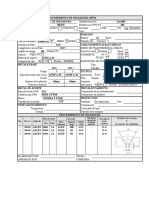
- Wps Recuperacion de Eje de TransmisionDocument8 pagesWps Recuperacion de Eje de TransmisionJoelNo ratings yet
- PQR OmpletoDocument2 pagesPQR OmpletoGustavo Wilfredo Perez HuaringaNo ratings yet
- Alemites PDFDocument1 pageAlemites PDFkarmencitaconk4035100% (1)
- Procedimiento de Alineacion Laser. General v1 (Recuperado Automáticamente)Document4 pagesProcedimiento de Alineacion Laser. General v1 (Recuperado Automáticamente)victor gomezNo ratings yet
- Listado Cooperativas Buses UrbanosDocument5 pagesListado Cooperativas Buses UrbanosSantiago RosasNo ratings yet
- GOULDS PUMP 3196 - I - FRAME - Bulletin - Spanish - ANSIDocument19 pagesGOULDS PUMP 3196 - I - FRAME - Bulletin - Spanish - ANSIJorge Andres PozoNo ratings yet
- Norma 1135Document24 pagesNorma 1135manuel_saavedra_32No ratings yet
- E 11018 MDocument1 pageE 11018 MMelvin Ramirez100% (1)
- Catalogo Productos TEADITDocument86 pagesCatalogo Productos TEADITImpreza100% (1)
- Ficha Tecnica Exatub 81 Ni2Document1 pageFicha Tecnica Exatub 81 Ni2Ngro Quinapaxi GonzalezNo ratings yet
- Anillo-Seguro Seeger-Codigo-193687380250566 PDFDocument2 pagesAnillo-Seguro Seeger-Codigo-193687380250566 PDFmicoswNo ratings yet
- E 7018Document1 pageE 7018Alvaro González SersenNo ratings yet
- Inspeccion Visual Ficha Tecnica Equipos PittingDocument6 pagesInspeccion Visual Ficha Tecnica Equipos PittingEdwin Francisco Plaza RamirezNo ratings yet
- Aceros InoxidablesDocument37 pagesAceros InoxidablesAD DianaNo ratings yet
- FT 11 001 Astm A516 GR70Document1 pageFT 11 001 Astm A516 GR70Juan Almeida100% (1)
- Et - Servicio de Ado de ChumacerasDocument5 pagesEt - Servicio de Ado de Chumacerasmiguelrosasxx100% (1)
- SKF - Sufijos RodamientosDocument3 pagesSKF - Sufijos RodamientosAaron Oropeza100% (3)
- Acoplamientos Flender PDFDocument36 pagesAcoplamientos Flender PDFJorge A Vilal0% (1)
- Intelligent Drivesystems Worldwide Services TitleDocument114 pagesIntelligent Drivesystems Worldwide Services TitleOscar Giovani SosaNo ratings yet
- WELD 71T9 Nueva Hoja TécnicaDocument1 pageWELD 71T9 Nueva Hoja TécnicaCarlos AguayoNo ratings yet
- Equivalencia de Normas Internacionales Usadas para Identificar El Grado de Dureza de Los PernosDocument7 pagesEquivalencia de Normas Internacionales Usadas para Identificar El Grado de Dureza de Los PernosjrlobovNo ratings yet
- Post calentamiento de juntas soldadasDocument3 pagesPost calentamiento de juntas soldadasPaul GavilanesNo ratings yet
- Informe de Trabajos de Limpieza en Intercambiador de CalorDocument10 pagesInforme de Trabajos de Limpieza en Intercambiador de CalorVanessaJackelineGonzalezGuevaraNo ratings yet
- Catalogo Bipress WebDocument45 pagesCatalogo Bipress WebJ Ferreyra LibanoNo ratings yet
- Cilindros Neumaticos 2021Document99 pagesCilindros Neumaticos 2021Daniel MaureiraNo ratings yet
- Análisis de falla piñón caja cambios embarcaciónDocument5 pagesAnálisis de falla piñón caja cambios embarcacióncristhian santos livia vargasNo ratings yet
- TORNERIADocument9 pagesTORNERIAJimmy CalizayaNo ratings yet
- Redondeado de láminas con tornillo de bancoDocument4 pagesRedondeado de láminas con tornillo de bancoCarlos RodriguezNo ratings yet
- Pastillas CarburadasDocument35 pagesPastillas CarburadasGonzalo Perez Fernandez60% (5)
- Reporte de Reparacion H 50 48 24 9Document9 pagesReporte de Reparacion H 50 48 24 9ositorxNo ratings yet
- Eje de PalierDocument4 pagesEje de PalierJean QuispeNo ratings yet
- Taller de AcoplesDocument7 pagesTaller de AcoplesCARLITOS VEGANo ratings yet
- Procedimiento para Un Tanque de Combustible en Acero InoxidableDocument3 pagesProcedimiento para Un Tanque de Combustible en Acero InoxidableDiego Mamani AlmanacinNo ratings yet
- Ajuste Montaje Verificación Control Máquinas mecanismos-MINDEF Parte1 1342 PDFDocument151 pagesAjuste Montaje Verificación Control Máquinas mecanismos-MINDEF Parte1 1342 PDFHipolito ChoqueNo ratings yet
- Acoplamiento Dodg ParaflexDocument4 pagesAcoplamiento Dodg Paraflexanibal farfanNo ratings yet
- Historia de la nitruración enDocument3 pagesHistoria de la nitruración enaide natalyNo ratings yet
- Códigos y partes de bombas industrialesDocument1 pageCódigos y partes de bombas industrialesCamilo Dittus LeónNo ratings yet
- Arenado y granallado: procesos, equipos, seguridad y usos industrialesDocument25 pagesArenado y granallado: procesos, equipos, seguridad y usos industrialesManolo BeniqueNo ratings yet
- Chumaceras BipartidasDocument71 pagesChumaceras BipartidasJhonFerneyBohorquezSaldarriagaNo ratings yet
- Capitulo 24. Precalentamiento y Postcalentamiento (Modo de Compatibilidad)Document105 pagesCapitulo 24. Precalentamiento y Postcalentamiento (Modo de Compatibilidad)Erasto Landaverde Lm100% (2)
- Simbología de Soldadura AWSDocument9 pagesSimbología de Soldadura AWSIván GM100% (1)
- Sellos Mecanicos de CartuchoDocument5 pagesSellos Mecanicos de CartuchoJulio RudiñoNo ratings yet
- Curso Uso Torquimetro KomatsuDocument16 pagesCurso Uso Torquimetro KomatsuHector CharreNo ratings yet
- ALINEACIONDocument21 pagesALINEACIONBlakysha GonzalezNo ratings yet
- AlineamientoDocument40 pagesAlineamientoLenin Castillo100% (1)
- ALINEACIONDocument20 pagesALINEACIONALAAN89No ratings yet
- Alineacion de EjesDocument11 pagesAlineacion de EjesCarlos AdameNo ratings yet
- AlineacionDocument8 pagesAlineacionLuis EstevesNo ratings yet
- Algunas Tecnicas de Alineamiento ResumenDocument8 pagesAlgunas Tecnicas de Alineamiento ResumenFelipe Salazar VelozoNo ratings yet
- Alineacion de EjesDocument11 pagesAlineacion de EjesPUERTASOSPINO96% (23)
- Regla de BesselDocument5 pagesRegla de BesselMarcelo MontesNo ratings yet
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308From EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308No ratings yet
- Trazo de InvolutaDocument9 pagesTrazo de InvolutaAlejandro CisnerosNo ratings yet
- VentiladoresDocument16 pagesVentiladoresAlejandro Cisneros100% (1)
- Siete Nuevas Herramientas de La CalidadDocument8 pagesSiete Nuevas Herramientas de La CalidadAlejandro CisnerosNo ratings yet
- Impacto de Las Actividades Humanas Sobre La NaturalezaDocument10 pagesImpacto de Las Actividades Humanas Sobre La NaturalezaAlejandro CisnerosNo ratings yet
- Resumen U1 U2Document29 pagesResumen U1 U2Alejandro CisnerosNo ratings yet
- Caldera PirotubularDocument16 pagesCaldera PirotubularAlejandro Cisneros100% (1)
- Ejecucion y DesarrolloDocument16 pagesEjecucion y DesarrolloAlejandro CisnerosNo ratings yet
- Proyecto de Diseño, Ingenieria Mecanica y Proyecto Camara de RefrigeracionDocument9 pagesProyecto de Diseño, Ingenieria Mecanica y Proyecto Camara de RefrigeracionAlejandro CisnerosNo ratings yet
- Implementación de equipo de refrigeración en laboratorio de mecánicaDocument29 pagesImplementación de equipo de refrigeración en laboratorio de mecánicaAlejandro Cisneros100% (1)
- Tema 6 Turbinas Hidráulica y Centrales HidroeléctricasDocument23 pagesTema 6 Turbinas Hidráulica y Centrales HidroeléctricasAlejandro CisnerosNo ratings yet
- Sistema NeumaticoDocument10 pagesSistema NeumaticoAlejandro CisnerosNo ratings yet
- Opinion H2O MXDocument1 pageOpinion H2O MXAlejandro CisnerosNo ratings yet
- Replanteamiento de La Estructura de TrabajoDocument7 pagesReplanteamiento de La Estructura de TrabajoAlejandro CisnerosNo ratings yet
- Sistema de RefrigeracionDocument15 pagesSistema de RefrigeracionAlejandro CisnerosNo ratings yet
- Cálculos de EngranesDocument10 pagesCálculos de EngranesAlejandro CisnerosNo ratings yet
- Proyecto VerdeDocument13 pagesProyecto VerdeAlejandro CisnerosNo ratings yet
- Unidad 3 Transferencia de CalorDocument9 pagesUnidad 3 Transferencia de CalorAlejandro CisnerosNo ratings yet
- El Tratado de Libre Comercio de América Del NorteDocument8 pagesEl Tratado de Libre Comercio de América Del NorteAlejandro CisnerosNo ratings yet
- Resumen U1 U2Document29 pagesResumen U1 U2Alejandro CisnerosNo ratings yet
- Estructuras CristalinasDocument3 pagesEstructuras CristalinasAlejandro CisnerosNo ratings yet
- Unidad 3 Transferencia de CalorDocument9 pagesUnidad 3 Transferencia de CalorAlejandro CisnerosNo ratings yet
- Defectos en Estructuras de MaterialesDocument3 pagesDefectos en Estructuras de MaterialesAlejandro CisnerosNo ratings yet
- AluminioDocument10 pagesAluminioAlejandro CisnerosNo ratings yet
- Organización y funciones básicas de una empresaDocument3 pagesOrganización y funciones básicas de una empresaAlejandro CisnerosNo ratings yet
- AluminioDocument11 pagesAluminioAlejandro CisnerosNo ratings yet
- Resumen Norma Astm E3Document7 pagesResumen Norma Astm E3Alejandro Cisneros50% (4)
- 8 Trabajos de Investigacion Sobre El AguaymantoDocument34 pages8 Trabajos de Investigacion Sobre El AguaymantoOmar Contreras CoronadoNo ratings yet
- Declaración Viena Delincuencia JusticiaDocument6 pagesDeclaración Viena Delincuencia JusticiaCarlos Muerte GonzalezNo ratings yet
- LacasDocument3 pagesLacasAlfredo TesarikNo ratings yet
- Redes neuronales: tipos de entrenamiento y arquitecturas principalesDocument7 pagesRedes neuronales: tipos de entrenamiento y arquitecturas principalesDavid Angel Alvarez CayotopaNo ratings yet
- Distrito de San Juan BautistaDocument7 pagesDistrito de San Juan BautistaAugusto Parra FloresNo ratings yet
- Plan de Negocio 2021 Formato LlenoDocument13 pagesPlan de Negocio 2021 Formato LlenoTomy villanueva limaNo ratings yet
- Cinetica de Un Punto - Metodos de Trabajo y Energia 2Document8 pagesCinetica de Un Punto - Metodos de Trabajo y Energia 2Pedro C60% (5)
- Matriz Afectaciones Madr Consolidado 23082023 AgricolaDocument12 pagesMatriz Afectaciones Madr Consolidado 23082023 AgricolaNayita VelezNo ratings yet
- Silabus de Gestión Presupuestaria y FinancieraDocument5 pagesSilabus de Gestión Presupuestaria y FinancieraJose Luis100% (1)
- Clase 2 Sensorica y Actorica 2015Document79 pagesClase 2 Sensorica y Actorica 2015Walther LaricoNo ratings yet
- Certificado de Calidad Sikaflex 2C NSDocument2 pagesCertificado de Calidad Sikaflex 2C NSeslysa100% (1)
- Cultivo Aji Paprika 2010 PDFDocument19 pagesCultivo Aji Paprika 2010 PDFCessar MorraNo ratings yet
- Actividad 2 - Mi Primer Scratch Tipos de Datos y Estructuras en Los AlgoritmoDocument8 pagesActividad 2 - Mi Primer Scratch Tipos de Datos y Estructuras en Los Algoritmoconsuelo perezNo ratings yet
- Pseudocódigo: lenguaje simplificado para describir algoritmosDocument9 pagesPseudocódigo: lenguaje simplificado para describir algoritmossolomilpalabras100% (1)
- Contratos ApunteDocument23 pagesContratos ApunteAylen LuchiniNo ratings yet
- Recubrimiento Biocomestible A Base de Mucilago de Aloe VeraDocument44 pagesRecubrimiento Biocomestible A Base de Mucilago de Aloe VeraMariana Alexandra Alejos GalloNo ratings yet
- La Voz de Huétor Vega - Octubre 2011Document24 pagesLa Voz de Huétor Vega - Octubre 2011huetorvegaNo ratings yet
- Juicio de arrendamiento: ofrecimiento de pruebasDocument2 pagesJuicio de arrendamiento: ofrecimiento de pruebasDaniela NodelNo ratings yet
- Mapa Funcional Como Una HerramientaDocument94 pagesMapa Funcional Como Una HerramientaJoaquina BecerraNo ratings yet
- Ley 860 de 2003 Reforma Sistema General de PensionesDocument8 pagesLey 860 de 2003 Reforma Sistema General de PensionesYolanda MartinezNo ratings yet
- Contrato de Obra de Construcción de Casa ViviendaDocument3 pagesContrato de Obra de Construcción de Casa ViviendawildeboxNo ratings yet
- Cómo Convertir Kindle A PDF Epub y Descargar Libros de Kindle Unlimited Al PC - GUIADocument19 pagesCómo Convertir Kindle A PDF Epub y Descargar Libros de Kindle Unlimited Al PC - GUIAPeterNo ratings yet
- Aire Acondicionado CentralDocument6 pagesAire Acondicionado Centraleduardoedz100% (1)
- TERRAPLDocument10 pagesTERRAPLRaulNo ratings yet
- Plan de Exportacion Empresa RICA SULADocument67 pagesPlan de Exportacion Empresa RICA SULALidia MazariegosNo ratings yet
- Pliego de Prescripciones Técnicas-2023-01238 PPT CORE Galdakao (V7)Document26 pagesPliego de Prescripciones Técnicas-2023-01238 PPT CORE Galdakao (V7)aaaaaaaaaNo ratings yet
- Informe Ssoma 10Document26 pagesInforme Ssoma 10chocotitoduroNo ratings yet
- Nueva versión de software para analizadores A15/A25Document10 pagesNueva versión de software para analizadores A15/A25Kevin DiazNo ratings yet
- Tarea2 Qwerty vs. DvorakDocument1 pageTarea2 Qwerty vs. DvorakJailene MontoyaNo ratings yet