You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- New HEPA Al SepDocument2 pagesNew HEPA Al Seppham hoang quanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Best Nest: Transactional Writing: ExplanationDocument4 pagesThe Best Nest: Transactional Writing: Explanationpham hoang quanNo ratings yet
- Connecting Ideas in Academic Writing Update 051112Document2 pagesConnecting Ideas in Academic Writing Update 051112Sasa MilosevicNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Transition and Linking WordsDocument2 pagesTransition and Linking WordsMj_ANo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- 2013 Hall Rules-Conventions Ac WritingDocument11 pages2013 Hall Rules-Conventions Ac WritingWayra BANo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- 2013 Hall Rules-Conventions Ac WritingDocument11 pages2013 Hall Rules-Conventions Ac WritingWayra BANo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- CodeBuilderv4 3Document25 pagesCodeBuilderv4 3pham hoang quanNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Control DC ServoDocument6 pagesControl DC Servopham hoang quanNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- E3zm VDocument13 pagesE3zm Vpham hoang quanNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- E2a M12-KS04Document18 pagesE2a M12-KS04vuong49vtuNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Lenh SlbuildDocument1 pageLenh Slbuildpham hoang quanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Capsule Filler UrsDocument22 pagesCapsule Filler Urspham hoang quan100% (2)
- Brushed MotorDocument4 pagesBrushed Motorpham hoang quanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Model Predictive Control Based On The PDFDocument10 pagesModel Predictive Control Based On The PDFpham hoang quanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- s7-1200 Opc Simatic-Net eDocument28 pagess7-1200 Opc Simatic-Net ebsb1912No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Opc Toolbox1Document5 pagesOpc Toolbox1pham hoang quanNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Backstepping Control Position and SpeedDocument6 pagesBackstepping Control Position and Speedpham hoang quanNo ratings yet
- Writing Grammar Usage and Style 471Document223 pagesWriting Grammar Usage and Style 471pham hoang quanNo ratings yet
- Connecting Ideas in Academic Writing Update 051112Document2 pagesConnecting Ideas in Academic Writing Update 051112Sasa MilosevicNo ratings yet
- Simplified English Rules and VocabularyDocument34 pagesSimplified English Rules and Vocabularyted.engel@gmail.com100% (2)
- SCE en 030-050 R1209 AnalogwertverarbeitungDocument31 pagesSCE en 030-050 R1209 Analogwertverarbeitungpham hoang quanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- E6B2-C Rotary Encoder DatasheetDocument11 pagesE6B2-C Rotary Encoder DatasheetRosendo Morales100% (1)
- Supervisory Control & Data AcquisitionDocument34 pagesSupervisory Control & Data AcquisitionLuckyboybk FCNo ratings yet
- Why Do We Wear Our Seatbelt?: Transactional Writing: ExplanationDocument4 pagesWhy Do We Wear Our Seatbelt?: Transactional Writing: Explanationpham hoang quanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 07 AlarmManagement 29.8.13Document39 pages07 AlarmManagement 29.8.13pandhuNo ratings yet
- Simatic: S7-200 TipsDocument21 pagesSimatic: S7-200 Tipsnamdt90No ratings yet
- IJEE1352Document7 pagesIJEE1352pham hoang quanNo ratings yet
- S7 1200 Easy BookDocument122 pagesS7 1200 Easy Bookpham hoang quanNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Opc Toolbox1Document5 pagesOpc Toolbox1pham hoang quanNo ratings yet
- Directive 2006-42-CE - Machinery PDFDocument63 pagesDirective 2006-42-CE - Machinery PDFeng13No ratings yet
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDocument24 pages(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6No ratings yet
- Analisis Kebutuhan Bahan Ajar Berbasis EDocument9 pagesAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniNo ratings yet
- Regulasi KampenDocument81 pagesRegulasi KampenIrWaN Dompu100% (2)
- Meta100 AP Brochure WebDocument15 pagesMeta100 AP Brochure WebFirman RamdhaniNo ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
- Jurnal Job DescriptionDocument13 pagesJurnal Job DescriptionAji Mulia PrasNo ratings yet
- School Based Management Contextualized Self Assessment and Validation Tool Region 3Document29 pagesSchool Based Management Contextualized Self Assessment and Validation Tool Region 3Felisa AndamonNo ratings yet
- Control ValvesDocument95 pagesControl ValvesHardik Acharya100% (1)
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Document2 pagesSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Installation Instructions INI Luma Gen2Document21 pagesInstallation Instructions INI Luma Gen2John Kim CarandangNo ratings yet
- solidworks ขั้นพื้นฐานDocument74 pagessolidworks ขั้นพื้นฐานChonTicha'No ratings yet
- D E S C R I P T I O N: Acknowledgement Receipt For EquipmentDocument2 pagesD E S C R I P T I O N: Acknowledgement Receipt For EquipmentTindusNiobetoNo ratings yet
- Đề Tuyển Sinh Lớp 10 Môn Tiếng AnhDocument11 pagesĐề Tuyển Sinh Lớp 10 Môn Tiếng AnhTrangNo ratings yet
- Thesis TipsDocument57 pagesThesis TipsJohn Roldan BuhayNo ratings yet
- 23 Ray Optics Formula Sheets Getmarks AppDocument10 pages23 Ray Optics Formula Sheets Getmarks AppSiddhant KaushikNo ratings yet
- The University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDocument5 pagesThe University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDavid Adeyinka RamgobinNo ratings yet
- Configuration Guide - Interface Management (V300R007C00 - 02)Document117 pagesConfiguration Guide - Interface Management (V300R007C00 - 02)Dikdik PribadiNo ratings yet
- Hard DiskDocument9 pagesHard DiskAmarnath SahNo ratings yet
- Taylor Series PDFDocument147 pagesTaylor Series PDFDean HaynesNo ratings yet
- Bone Surface MarkingsDocument2 pagesBone Surface MarkingsNurul Afiqah Fattin AmatNo ratings yet
- 'Causative' English Quiz & Worksheet UsingEnglish ComDocument2 pages'Causative' English Quiz & Worksheet UsingEnglish ComINAWATI BINTI AMING MoeNo ratings yet
- Puma PypDocument20 pagesPuma PypPrashanshaBahetiNo ratings yet
- Functions of Theory in ResearchDocument2 pagesFunctions of Theory in ResearchJomariMolejonNo ratings yet
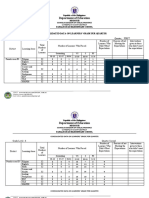
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- Board of Technical Education (Student Marksheet)Document2 pagesBoard of Technical Education (Student Marksheet)Manoj SainiNo ratings yet
- A Project Report ON Strategic Purchasing Procedure, Systems and Policies (Hospital Industry)Document20 pagesA Project Report ON Strategic Purchasing Procedure, Systems and Policies (Hospital Industry)amitwin1983No ratings yet
- JO 20221109 NationalDocument244 pagesJO 20221109 NationalMark Leo BejeminoNo ratings yet
- Ilovepdf MergedDocument503 pagesIlovepdf MergedHemantNo ratings yet
- National Interest Waiver Software EngineerDocument15 pagesNational Interest Waiver Software EngineerFaha JavedNo ratings yet
- Waves and Ocean Structures Journal of Marine Science and EngineeringDocument292 pagesWaves and Ocean Structures Journal of Marine Science and Engineeringheinz billNo ratings yet