You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Operating Systems Implementation COMP3300: SecurityDocument7 pagesOperating Systems Implementation COMP3300: SecurityShyam VenkataramanNo ratings yet
- Virtual Memory Virtual MemoryDocument9 pagesVirtual Memory Virtual MemoryShyam VenkataramanNo ratings yet
- Syn 07 Ho 4Document9 pagesSyn 07 Ho 4Shyam VenkataramanNo ratings yet
- Protectionho 4Document4 pagesProtectionho 4Shyam VenkataramanNo ratings yet
- Oss 02 Ho 4Document5 pagesOss 02 Ho 4Shyam VenkataramanNo ratings yet
- Process 05 Ho 4Document11 pagesProcess 05 Ho 4Shyam VenkataramanNo ratings yet
- Filesho 4Document11 pagesFilesho 4Shyam VenkataramanNo ratings yet
- Memho 4Document11 pagesMemho 4Shyam VenkataramanNo ratings yet
- OsDocument1 pageOsShyam VenkataramanNo ratings yet
- Device Driver Modules Are Used To Control A Particular: IO System IO SystemDocument3 pagesDevice Driver Modules Are Used To Control A Particular: IO System IO SystemShyam VenkataramanNo ratings yet
- Disk Drives: Storage StorageDocument5 pagesDisk Drives: Storage StorageShyam VenkataramanNo ratings yet
- Cpu 06 Ho 4Document9 pagesCpu 06 Ho 4Shyam VenkataramanNo ratings yet
- Operating Systems Implementation COMP3300: DeadlocksDocument9 pagesOperating Systems Implementation COMP3300: DeadlocksShyam VenkataramanNo ratings yet
- Operating Systems Implementation COMP3300 A Modern Computer SystemDocument6 pagesOperating Systems Implementation COMP3300 A Modern Computer SystemShyam VenkataramanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Do-254 WPDocument10 pagesDo-254 WPMazen OmerNo ratings yet
- Series Resonance - GATE Study Material in PDFDocument6 pagesSeries Resonance - GATE Study Material in PDFTestbook BlogNo ratings yet
- Sensing Products: Quick Product GuideDocument5 pagesSensing Products: Quick Product GuideWMONTOYA4897No ratings yet
- Nola 03 M 106 Rev4 enDocument24 pagesNola 03 M 106 Rev4 enBelsky SergeyNo ratings yet
- DatasheetDocument88 pagesDatasheetmarino246No ratings yet
- SEL-2414 Transformer MonitorDocument3 pagesSEL-2414 Transformer MonitorMARTINCORTES1992100% (1)
- Radar Atlas 1000 Operational Manual Ver 2 2Document168 pagesRadar Atlas 1000 Operational Manual Ver 2 2Sergey Vertyanov100% (1)
- Types of Transmission MediaDocument3 pagesTypes of Transmission MediaziaullahNo ratings yet
- Syllabus For Entrance ExaminationDocument4 pagesSyllabus For Entrance ExaminationmaheshvahaniNo ratings yet
- 7NV04PDocument29 pages7NV04PAdam Amanda SchwemleinNo ratings yet
- Of Charge: Verification DependenceDocument7 pagesOf Charge: Verification DependenceLorith Plays SMPNo ratings yet
- Wireless ElectricityDocument18 pagesWireless ElectricityRaghav Gupta100% (1)
- PD FinalDocument25 pagesPD FinalAnusha ChidagniNo ratings yet
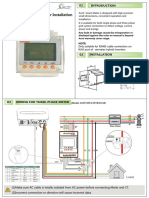
- Acrel Meter Installation Three PhaseDocument4 pagesAcrel Meter Installation Three PhasehardaniNo ratings yet
- Datacom Report: Global ResultsDocument1 pageDatacom Report: Global ResultsmeddouNo ratings yet
- PM-9000 Service ManualDocument80 pagesPM-9000 Service ManualVictorHernandezNo ratings yet
- Instructions CPS2 Multi Boot v2Document11 pagesInstructions CPS2 Multi Boot v2Valdemar GomesNo ratings yet
- PSU MCQs On Satellite Communication and RadarDocument6 pagesPSU MCQs On Satellite Communication and RadarMohan Devaraj67% (3)
- Lenovo C440 AIO Service Manual PDFDocument81 pagesLenovo C440 AIO Service Manual PDFMatt BushnellNo ratings yet
- MC2100 Spec SheetDocument2 pagesMC2100 Spec SheetToma HrgNo ratings yet
- AC-S13) Week 13 - Task: Assignment - My Best Birthday PresentDocument3 pagesAC-S13) Week 13 - Task: Assignment - My Best Birthday PresentRoberto Pablo Ramirez OrtegaNo ratings yet
- Polaroid LCD Portable TV - 7 M ManualDocument24 pagesPolaroid LCD Portable TV - 7 M ManualEduardo CastilloNo ratings yet
- University of Guyana: CSE 1100 Tutorial Worksheet 1 History of ComputerDocument4 pagesUniversity of Guyana: CSE 1100 Tutorial Worksheet 1 History of ComputerShane A ChesterNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.ajuklm88No ratings yet
- Rumus Data Dashboard CGS Winning Program 2022 - 090722Document198 pagesRumus Data Dashboard CGS Winning Program 2022 - 090722Pisangmu PisangkuNo ratings yet
- Est2 Installation and Service ManualDocument142 pagesEst2 Installation and Service ManualJason Eric YuNo ratings yet
- Training Network Tests - UMTSDocument21 pagesTraining Network Tests - UMTSaondortogluNo ratings yet
- Qatar University Core Curriculum Requirement: Instructor: Mrs. Huda Al Yafei Spring 2021 - L04Document9 pagesQatar University Core Curriculum Requirement: Instructor: Mrs. Huda Al Yafei Spring 2021 - L04yousefNo ratings yet
- E1u2275019 04Document12 pagesE1u2275019 04Ivan AbbáNo ratings yet