You might also like
- Matlab Finite Element Modeling For Materials Engineers Using MATLABDocument74 pagesMatlab Finite Element Modeling For Materials Engineers Using MATLABPujara ManishNo ratings yet
- (Methods in Molecular Biology 1299) Gary R. Skuse, Maureen C. Ferran (Eds.) - Cardiomyocytes - Methods and Protocols-Humana Press (2015)Document227 pages(Methods in Molecular Biology 1299) Gary R. Skuse, Maureen C. Ferran (Eds.) - Cardiomyocytes - Methods and Protocols-Humana Press (2015)zaazlxNo ratings yet
- KiringDocument8 pagesKiringzaazlxNo ratings yet
- Scilab BeginnersDocument33 pagesScilab BeginnersCarlos Soza RossNo ratings yet
- Finite Element Method For Eigenvalue Problems in ElectromagneticsDocument38 pagesFinite Element Method For Eigenvalue Problems in ElectromagneticsBhargav BikkaniNo ratings yet
- RappazDocument13 pagesRappazzaazlxNo ratings yet
- 0000473Document13 pages0000473zaazlxNo ratings yet
- Bending MomentDocument5 pagesBending MomentzaazlxNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- NEOCLASSICAL CITY PlanningDocument10 pagesNEOCLASSICAL CITY PlanningAfrahNo ratings yet
- Asida Distance Relay Adr-239aDocument27 pagesAsida Distance Relay Adr-239aRitesh JaiswalNo ratings yet
- Module 3 Density Altitude ExperimentDocument3 pagesModule 3 Density Altitude ExperimentIvan100% (1)
- Symbolic TBDocument512 pagesSymbolic TBJanet LeongNo ratings yet
- Annex12 Technical Cards For Accessible ConstructionDocument44 pagesAnnex12 Technical Cards For Accessible Constructionarchitectfemil6663No ratings yet
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDocument20 pagesMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemNo ratings yet
- V7.0 Function ListDocument48 pagesV7.0 Function ListInyectronix VyhNo ratings yet
- Fema 154 FormsDocument3 pagesFema 154 FormslesgiuNo ratings yet
- Sigma Marine Coatings Manual - Part44Document2 pagesSigma Marine Coatings Manual - Part44EngTamerNo ratings yet
- INSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurDocument3 pagesINSPECTION-REPORT-OF-RIVER-CHANNEL-IN-BRGY Ponong in Magarao, Camarines SurBerp OnrubiaNo ratings yet
- CV Mayank Shekhar Dwivedi IITBDocument4 pagesCV Mayank Shekhar Dwivedi IITBGoutam GiriNo ratings yet
- Safety Inventory ExercisesDocument12 pagesSafety Inventory ExercisesParnabho KunduNo ratings yet
- Physics 02-07 Centripetal Force and Banked CurvesDocument2 pagesPhysics 02-07 Centripetal Force and Banked CurveslatteNo ratings yet
- Astm D3212.380331 1Document3 pagesAstm D3212.380331 1anish_am2005No ratings yet
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDDocument27 pagesCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungNo ratings yet
- Vector VII 104-561kVA User Manual 6.6.1Document165 pagesVector VII 104-561kVA User Manual 6.6.1juliocanel2009100% (3)
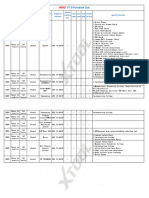
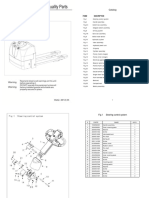
- 3000w Inverter Parts ListDocument6 pages3000w Inverter Parts ListayoowuyeNo ratings yet
- Lldpe Petrothene Ga502-024Document2 pagesLldpe Petrothene Ga502-024Noe floresNo ratings yet
- Rossler Chaotic Circuit and It's Application For Communication SecureDocument10 pagesRossler Chaotic Circuit and It's Application For Communication SecureMada Sanjaya WsNo ratings yet
- ASTM Data and ControlDocument141 pagesASTM Data and ControlYohanes Ronny100% (1)
- Transistor IRFP350Document7 pagesTransistor IRFP350MiguelAngelCedanoBurrolaNo ratings yet
- Production Support ProcessDocument15 pagesProduction Support ProcesssantoshNo ratings yet
- FM Approvals CN 1613Document0 pagesFM Approvals CN 1613Marcelo PeixotoNo ratings yet
- Electrical & Civil-1resume PDFDocument2 pagesElectrical & Civil-1resume PDFanjar alamNo ratings yet
- "Part - I - General Central Services Group B'Document13 pages"Part - I - General Central Services Group B'NarayanaNo ratings yet
- Mitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualDocument152 pagesMitsubishi Electric Industrial Robots: Communication Middleware (Melfarxm - Ocx) Instruction ManualRafael GagoNo ratings yet
- Differential Calculus Assignment No.3Document20 pagesDifferential Calculus Assignment No.3Agerico FunelasNo ratings yet
- Csprog 2 WorkingnaDocument9 pagesCsprog 2 WorkingnaAaron CoroniaNo ratings yet
- Aip Enr 2.1-1 India 1 Aug 2007Document28 pagesAip Enr 2.1-1 India 1 Aug 2007itsrijoNo ratings yet
- Binsar Margiyanto: ND RDDocument2 pagesBinsar Margiyanto: ND RDmoez ben youssefNo ratings yet