You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Appbe Unesco PDFDocument203 pagesAppbe Unesco PDFArthur LimaNo ratings yet
- Defining Field EpidemiologyDocument446 pagesDefining Field Epidemiologyr_lilianaNo ratings yet
- Consimtamantul InformatDocument6 pagesConsimtamantul Informatr_lilianaNo ratings yet
- Leasu Andreescu Rogozea Comunicare MuresDocument6 pagesLeasu Andreescu Rogozea Comunicare Muresr_lilianaNo ratings yet
- Icohtec 2014Document242 pagesIcohtec 2014r_lilianaNo ratings yet
- Coronavirus SARS CoV 2 Guidance Environmental Cleaning Non Healthcare Facilities PDFDocument3 pagesCoronavirus SARS CoV 2 Guidance Environmental Cleaning Non Healthcare Facilities PDFjuancarlospar65No ratings yet
- Defining Field EpidemiologyDocument446 pagesDefining Field Epidemiologyr_lilianaNo ratings yet
- Laboratory Biosafety Guidance Related To Coronavirus Disease 2019 (COVID-19)Document13 pagesLaboratory Biosafety Guidance Related To Coronavirus Disease 2019 (COVID-19)Holly Smith100% (1)
- Guidelines For Presentation of Surveillance Data Final With Cover For We... - 0Document53 pagesGuidelines For Presentation of Surveillance Data Final With Cover For We... - 0r_lilianaNo ratings yet
- Imit2014 Badea 1Document14 pagesImit2014 Badea 1r_lilianaNo ratings yet
- Purcaru Rogozea Plos OneDocument6 pagesPurcaru Rogozea Plos Oner_lilianaNo ratings yet
- Consimtamantul InformatDocument6 pagesConsimtamantul Informatr_lilianaNo ratings yet
- Medical History Landmarks From The Activity of The RomanianDocument7 pagesMedical History Landmarks From The Activity of The Romanianr_lilianaNo ratings yet
- Mihai Ciuca and The Fight Against MalariaDocument1 pageMihai Ciuca and The Fight Against Malariar_lilianaNo ratings yet
- 21 Rogozea PDFDocument1 page21 Rogozea PDFr_lilianaNo ratings yet
- Iuliu Hatieganu - Man and Master of Romanian Medical SchoolDocument1 pageIuliu Hatieganu - Man and Master of Romanian Medical Schoolr_lilianaNo ratings yet
- Ic HNPH 2011Document81 pagesIc HNPH 2011r_lilianaNo ratings yet
- 2008 Cuprins JMB 02 EnglezaDocument3 pages2008 Cuprins JMB 02 Englezar_lilianaNo ratings yet
- 2008 Cuprins JMB 01 EnglezaDocument3 pages2008 Cuprins JMB 01 Englezar_lilianaNo ratings yet
- Manu P, Rogozea L - N Paulescu Despre Cauzele Bolilor VenericeDocument6 pagesManu P, Rogozea L - N Paulescu Despre Cauzele Bolilor Venericer_lilianaNo ratings yet
- Doctor communication and pancreatitisDocument2 pagesDoctor communication and pancreatitisr_lilianaNo ratings yet
- Rogozea - Repanovici 2008Document4 pagesRogozea - Repanovici 2008r_lilianaNo ratings yet
- 01 ACCMM2 12 Moleavin Rogozea EticaDocument6 pages01 ACCMM2 12 Moleavin Rogozea Eticar_lilianaNo ratings yet
- Telemedicine ethical dilemmasDocument5 pagesTelemedicine ethical dilemmasr_lilianaNo ratings yet
- 00 Rogozea - Ethics and Artificial InteligenceDocument6 pages00 Rogozea - Ethics and Artificial Inteligencer_lilianaNo ratings yet
- 18 Liliana-Rogozea Sanitary MonograpyDocument8 pages18 Liliana-Rogozea Sanitary Monograpyr_lilianaNo ratings yet
- Proceeding of The Ivth Balkan Congress of History of Medicine 2009Document194 pagesProceeding of The Ivth Balkan Congress of History of Medicine 2009r_liliana100% (1)
- Santander Rogozea, Nemet, Balescu, Moleavin, MiclausDocument5 pagesSantander Rogozea, Nemet, Balescu, Moleavin, Miclausr_lilianaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MHFA Psychosis Guidelines A4 2012 PDFDocument14 pagesMHFA Psychosis Guidelines A4 2012 PDFGrace LNo ratings yet
- Vygotsky’s Social Constructivist Theory of LearningDocument9 pagesVygotsky’s Social Constructivist Theory of LearningJascha KimNo ratings yet
- STENIUS, Erik - Wittgenstein's Tractatus. A Critical Exposition of Its Main Lines of ThoughtsDocument250 pagesSTENIUS, Erik - Wittgenstein's Tractatus. A Critical Exposition of Its Main Lines of ThoughtsJuan ErlleNo ratings yet
- Piaget, Jean 1980Document6 pagesPiaget, Jean 1980Dhian Gowinda Luh SafitriNo ratings yet
- Generation Gap - WorksheetDocument3 pagesGeneration Gap - WorksheetLisaStembelNo ratings yet
- International Journal of Artificial Intelligence and Soft Computing (IJAISC)Document2 pagesInternational Journal of Artificial Intelligence and Soft Computing (IJAISC)CS & ITNo ratings yet
- English Grammar and Correct Usage Sample TestsDocument2 pagesEnglish Grammar and Correct Usage Sample TestsOnin LaucsapNo ratings yet
- Puzzle Design Challenge Brief R Molfetta WeeblyDocument4 pagesPuzzle Design Challenge Brief R Molfetta Weeblyapi-274367128No ratings yet
- Cartilla de Ingreso A Ingles01Document7 pagesCartilla de Ingreso A Ingles01Yoni LgsmNo ratings yet
- Assessment of Grief CgiDocument3 pagesAssessment of Grief CgiAdrianNo ratings yet
- Rhythmic Activities Syllabus Outlines Course OutcomesDocument5 pagesRhythmic Activities Syllabus Outlines Course OutcomesTrexia PantilaNo ratings yet
- Unit 2 Troubleshooting English For AcademicsDocument9 pagesUnit 2 Troubleshooting English For AcademicsolexxxandrenkoNo ratings yet
- Dehaene, Stanislas - The Massive Impact of Literacy On The BrainDocument16 pagesDehaene, Stanislas - The Massive Impact of Literacy On The BrainIreneGálvezdeMontalbán100% (1)
- Secrets of Cold War TechnologyDocument162 pagesSecrets of Cold War TechnologyMuhammad Akhavan100% (1)
- Pangarap Pag Asa at Pagkakaisa Sa Gitna NG PandemyaDocument2 pagesPangarap Pag Asa at Pagkakaisa Sa Gitna NG Pandemyamarlon raguntonNo ratings yet
- Design Theories and ModelDocument36 pagesDesign Theories and ModelPau Pau PalomoNo ratings yet
- The Role of Human Motivation in Quality Inspection of Production ProcessesDocument11 pagesThe Role of Human Motivation in Quality Inspection of Production ProcessesSabahudin JasarevicNo ratings yet
- Assertive CommunicationDocument5 pagesAssertive CommunicationdanielrubarajNo ratings yet
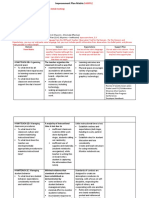
- Improvement Plan MatrixDocument3 pagesImprovement Plan MatrixJESSA MAE ORPILLANo ratings yet
- Reading and Writing Summative 1 and 2Document5 pagesReading and Writing Summative 1 and 2Janice L. LangitNo ratings yet
- English RPH Year 3Document17 pagesEnglish RPH Year 3Sekolah Kebangsaan SekolahNo ratings yet
- Vocabulary Questions For IIFT PDFDocument6 pagesVocabulary Questions For IIFT PDFamit kumarNo ratings yet
- Post Activity and Evaluation in Module 6 Post Activity:: Maureen G. Retoriano BSED 1-FilipinoDocument15 pagesPost Activity and Evaluation in Module 6 Post Activity:: Maureen G. Retoriano BSED 1-FilipinoMaui RetorianoNo ratings yet
- Research MethodologyDocument4 pagesResearch MethodologySubrat RathNo ratings yet
- Aptitude Tests Categories QCDocument5 pagesAptitude Tests Categories QChidayathnsNo ratings yet
- English 2 Rhyming Words PDFDocument40 pagesEnglish 2 Rhyming Words PDFJovito Limot100% (2)
- Group Work 1 1Document21 pagesGroup Work 1 1hopeboyd36No ratings yet
- RCI - Book On LD PDFDocument49 pagesRCI - Book On LD PDFNikhil Kumar DasNo ratings yet
- NLP Lab Manual (R20)Document24 pagesNLP Lab Manual (R20)Gopi Naveen100% (1)
- Articles WorkbookDocument8 pagesArticles WorkbookrajisundarNo ratings yet