You might also like
- Analog Interface, AD1359-1Document26 pagesAnalog Interface, AD1359-1Bety KblloNo ratings yet
- Analog Implementation of The Soft-Max FunctionDocument4 pagesAnalog Implementation of The Soft-Max Function曾惟No ratings yet
- Making Premium Alky LateDocument25 pagesMaking Premium Alky LateChristianGuerreroNo ratings yet
- Portable Document Format Reference Manual - Version 1.1Document298 pagesPortable Document Format Reference Manual - Version 1.1Akihito Hashimoto100% (1)
- 2017 ICSV Det of Unb in A Ror BRG SystemDocument7 pages2017 ICSV Det of Unb in A Ror BRG SystemAka ShriNo ratings yet
- Parameter Estimation of Switching SystemsDocument11 pagesParameter Estimation of Switching SystemsJosé RagotNo ratings yet
- Maquin STA 09Document28 pagesMaquin STA 09p26q8p8xvrNo ratings yet
- 2CE 611-Expansion Theorem and Free Response From MODE Superposition MethodDocument7 pages2CE 611-Expansion Theorem and Free Response From MODE Superposition MethodRoshni TNo ratings yet
- F) (X) : D DX F) (X), M 1 0,: Acta Mathematica Vietnamica Volume 24, Number 2, 1999, Pp. 207-233Document27 pagesF) (X) : D DX F) (X), M 1 0,: Acta Mathematica Vietnamica Volume 24, Number 2, 1999, Pp. 207-233engr_umer_01No ratings yet
- Monte Carlo Integration LectureDocument8 pagesMonte Carlo Integration LectureNishant PandaNo ratings yet
- Simulation of Inverted Pendulum Using Neural Networks For IdentificationDocument7 pagesSimulation of Inverted Pendulum Using Neural Networks For IdentificationYeshitila HailuNo ratings yet
- 21-22. Summations Metrices (Matrix)Document36 pages21-22. Summations Metrices (Matrix)Nasr UllahNo ratings yet
- Charak, Rochon, Sharma - Normal Families of Bicomplex Meromorphic Functions (2011)Document17 pagesCharak, Rochon, Sharma - Normal Families of Bicomplex Meromorphic Functions (2011)MarkoGeekyNo ratings yet
- SoftFRAC Matlab Library For RealizationDocument10 pagesSoftFRAC Matlab Library For RealizationKotadai Le ZKNo ratings yet
- Random-Number Generation: Discrete-Event System SimulationDocument32 pagesRandom-Number Generation: Discrete-Event System SimulationAreeba AshrafNo ratings yet
- International Conference NeruDocument10 pagesInternational Conference NeruNeeru SinghNo ratings yet
- Template Chaos CircuitDocument14 pagesTemplate Chaos CircuitEnrique PriceNo ratings yet
- A Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsDocument11 pagesA Computational Method With MAPLE For A Piecewise Polynomial Approximation To The Trigonometric FunctionsAurangZaib LaghariNo ratings yet
- Pre PrintDocument30 pagesPre Printgorot1No ratings yet
- Solving The Dual Subproblem of The Method of Moving Asymptotes Using A Trust-Region SchemeDocument20 pagesSolving The Dual Subproblem of The Method of Moving Asymptotes Using A Trust-Region SchemeTifroute MohamedNo ratings yet
- Stat Mining 43Document1 pageStat Mining 43Adonis HuaytaNo ratings yet
- Danksharding MathDocument9 pagesDanksharding MathLeon HibnikNo ratings yet
- Canonical Polyadic Decomposition With Orthogonality ConstraintsDocument24 pagesCanonical Polyadic Decomposition With Orthogonality ConstraintsBilius LauraNo ratings yet
- DCT Presentation1Document39 pagesDCT Presentation1party0703No ratings yet
- Method of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretDocument4 pagesMethod of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretmenguemengueNo ratings yet
- 01 K Means - MergedDocument26 pages01 K Means - MergedPattranit TeerakosonNo ratings yet
- Assignment 3: Trajectory Compression: 2022 Fall EECS205002 Linear Algebra Due: 2022/12/14Document4 pagesAssignment 3: Trajectory Compression: 2022 Fall EECS205002 Linear Algebra Due: 2022/12/14Samuel DharmaNo ratings yet
- Composite Predictive Functional Control Strategies, Application To Positioning AxesDocument10 pagesComposite Predictive Functional Control Strategies, Application To Positioning AxesAndreeaNo ratings yet
- L5 - Fourier Series (Proposed Exercises)Document3 pagesL5 - Fourier Series (Proposed Exercises)Rodrigo Andres Calderon NaranjoNo ratings yet
- IMECS2009 pp177-182Document6 pagesIMECS2009 pp177-182LêĐạiHiệpNo ratings yet
- Monte Carlo BasicsDocument23 pagesMonte Carlo BasicsIon IvanNo ratings yet
- 1 s2.0 S1474667016377849 MainDocument6 pages1 s2.0 S1474667016377849 Mainprachi singhNo ratings yet
- Using Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchDocument14 pagesUsing Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchFransiscus DheniNo ratings yet
- Peng 2017Document5 pagesPeng 2017Sofia BouchenakNo ratings yet
- Optimal Filtering With Aerospace Applications: Section 2.2: Linear SystemsDocument37 pagesOptimal Filtering With Aerospace Applications: Section 2.2: Linear Systemsdayvox10No ratings yet
- Application of FACTS Devices For Damping of Power System OscillationsDocument6 pagesApplication of FACTS Devices For Damping of Power System OscillationsFelix GamarraNo ratings yet
- Learning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output DataDocument6 pagesLearning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output Datasho bhaNo ratings yet
- Polyfit ManualDocument4 pagesPolyfit ManualudayNo ratings yet
- Ieee Wind EnergyDocument16 pagesIeee Wind EnergyAnonymous ZFt1pzKY1No ratings yet
- Fourier Analysis and Sampling Theory: ReadingDocument10 pagesFourier Analysis and Sampling Theory: Readingessi90No ratings yet
- AI Com LDA Tarek-4Document1 pageAI Com LDA Tarek-4Gaurav KhalaseNo ratings yet
- The Optimal Control Chart ProceduřeDocument10 pagesThe Optimal Control Chart ProceduřeAnonymous FfIxH2o9No ratings yet
- Eyup,+4 XXX IbisDocument13 pagesEyup,+4 XXX IbisamonateeyNo ratings yet
- A Simple Method To Estimate Power Losses in Distribution NetworksDocument6 pagesA Simple Method To Estimate Power Losses in Distribution Networkszeljko_popovic9740No ratings yet
- Fuzzy Algo UpdatedDocument8 pagesFuzzy Algo Updatednirmala periasamyNo ratings yet
- Vibrations of StructuresDocument9 pagesVibrations of StructuresRafaAlmeidaNo ratings yet
- 2 Model Order Reduction in Mechanical EngineeringDocument42 pages2 Model Order Reduction in Mechanical EngineeringWallace FerreiraNo ratings yet
- Hoang 2017Document12 pagesHoang 2017Luis Martínez RamírezNo ratings yet
- Random-Number Generation: Discrete-Event System SimulationDocument56 pagesRandom-Number Generation: Discrete-Event System SimulationIsraa' Y. IsmailNo ratings yet
- Why Is The Linear Canonical Transform So Little KNDocument10 pagesWhy Is The Linear Canonical Transform So Little KNNavdeep GoelNo ratings yet
- An Algorithm To Compute The Transfer Function of A Mechanical SystemDocument6 pagesAn Algorithm To Compute The Transfer Function of A Mechanical SystemquestrwpNo ratings yet
- Part 04Document5 pagesPart 04rodi10No ratings yet
- Schlkopf 1998Document57 pagesSchlkopf 1998malik_john6261No ratings yet
- MCMC Final EditionDocument17 pagesMCMC Final EditionYou ZhaoNo ratings yet
- Ponencia Multirate WMCDocument7 pagesPonencia Multirate WMCskfrankoNo ratings yet
- MTH215 Mid Sem-2020Document2 pagesMTH215 Mid Sem-2020Safa MusthafaNo ratings yet
- Numerical Inverse Laplace Transforms For Electrical Engineering SimulationDocument25 pagesNumerical Inverse Laplace Transforms For Electrical Engineering SimulationMounirHanineNo ratings yet
- The Control of Linear Time-Periodic Systems Using Floquet-Lyapunov Theory Pierre Montagnier, Raymond J. Spiteri, Jorge AngelesDocument21 pagesThe Control of Linear Time-Periodic Systems Using Floquet-Lyapunov Theory Pierre Montagnier, Raymond J. Spiteri, Jorge AngelesijazNo ratings yet
- Interval Method For Interval Linear Program: Mathematical Communications 23Document11 pagesInterval Method For Interval Linear Program: Mathematical Communications 23danielNo ratings yet
- A Wavelet Operational Matrix Approach For Solving A Nonlinear Mixed Type Fractional Integro-Differential EquationDocument8 pagesA Wavelet Operational Matrix Approach For Solving A Nonlinear Mixed Type Fractional Integro-Differential EquationVNo ratings yet
- Finitepoint2D: A Meshless Gid Code For Linear Elasticity Enrique Escolano and Franco PerazzoDocument4 pagesFinitepoint2D: A Meshless Gid Code For Linear Elasticity Enrique Escolano and Franco PerazzoUrva TailorNo ratings yet
- Euclidean Distance Matrix TrickDocument3 pagesEuclidean Distance Matrix Trickabraham.shz24No ratings yet
- Quick Start Guide Guía de Inicio Rápido: TH-46PZ850U TH-50PZ850UDocument66 pagesQuick Start Guide Guía de Inicio Rápido: TH-46PZ850U TH-50PZ850Ujeffreyspeck7119No ratings yet
- Implanted Antenna For An Artificial Cardiac Pacemaker SystemDocument4 pagesImplanted Antenna For An Artificial Cardiac Pacemaker SystemAmin Khan YousafxaiNo ratings yet
- Economics of Power Generation Multiple Choice Questions and Answers Preparation For Competition Exams PDFDocument15 pagesEconomics of Power Generation Multiple Choice Questions and Answers Preparation For Competition Exams PDFsalman bhattiNo ratings yet
- Lab Equipment Worksheet: FlameDocument6 pagesLab Equipment Worksheet: FlameSabu LazerNo ratings yet
- 2016: Living From Your Center: Sanaya and Duane MessageDocument24 pages2016: Living From Your Center: Sanaya and Duane MessageELVIS100% (1)
- Design and Simulation of Solar Photovoltaic CellDocument23 pagesDesign and Simulation of Solar Photovoltaic CellKAUSHIK PRABHATH BANDINo ratings yet
- University of Hyderabad Post Graduate Diploma in Business Management (PGDBM) I Term Assignment (2016) Dbm-416: Quantitative and Research MethodsDocument4 pagesUniversity of Hyderabad Post Graduate Diploma in Business Management (PGDBM) I Term Assignment (2016) Dbm-416: Quantitative and Research Methodsrao_nari8305No ratings yet
- Pipe Earthing 8Document2 pagesPipe Earthing 8raghavendran raghu75% (4)
- Navi Loan Account StatementDocument1 pageNavi Loan Account StatementBorah SashankaNo ratings yet
- PROCEDURES MANUAL Meter 91dw52346Document5 pagesPROCEDURES MANUAL Meter 91dw52346rebravoNo ratings yet
- BulkConfigurator PDFDocument107 pagesBulkConfigurator PDFmatrixfrNo ratings yet
- Somaiya Vidyavihar UniversityDocument2 pagesSomaiya Vidyavihar UniversitySumit BhongNo ratings yet
- Standard Inspection and Test Plan ITP No: 904 Emergency Diesel GeneratorDocument5 pagesStandard Inspection and Test Plan ITP No: 904 Emergency Diesel GeneratorZaid RNo ratings yet
- Read MeDocument3 pagesRead MeGhazzanfar Ali KhanNo ratings yet
- CImg ReferenceDocument193 pagesCImg ReferenceculitabNo ratings yet
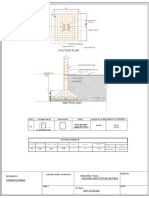
- Column Detail PDFDocument1 pageColumn Detail PDFShubham KushwahaNo ratings yet
- Business Process Reengineering: M. Parthiban Dept of Mech EngineeringDocument60 pagesBusiness Process Reengineering: M. Parthiban Dept of Mech Engineeringgiri123aeroNo ratings yet
- Readings in Philippine History: Prepared By: Joyce SampangDocument27 pagesReadings in Philippine History: Prepared By: Joyce Sampangmarj sampangNo ratings yet
- Bse DataDocument21 pagesBse DataVinod MaliNo ratings yet
- Sieve Analysis Data Sheet: ASTM D422-63 (2007)Document1 pageSieve Analysis Data Sheet: ASTM D422-63 (2007)Bart LuceñaNo ratings yet
- Long-Range Thermal Video Imaging System: Multiple Mission Profiles. One Reliable SolutionDocument3 pagesLong-Range Thermal Video Imaging System: Multiple Mission Profiles. One Reliable Solutionsquad bravoNo ratings yet
- TLV JA3 Air Drain TrapDocument2 pagesTLV JA3 Air Drain TrapMONANo ratings yet
- What Is The Shopify Partner ProgramDocument17 pagesWhat Is The Shopify Partner ProgramAvada CommerceNo ratings yet
- Some Observations and Experience With Pile Integrity Testing at Various Projects For EssarDocument5 pagesSome Observations and Experience With Pile Integrity Testing at Various Projects For EssarKausik DewanNo ratings yet
- Romi Oop 05 Javadatabase 1mei2011Document78 pagesRomi Oop 05 Javadatabase 1mei2011Nora AsteriaNo ratings yet
- Habitat International: Nesru H. Koroso, Monica Lengoiboni, Jaap A. ZevenbergenDocument15 pagesHabitat International: Nesru H. Koroso, Monica Lengoiboni, Jaap A. ZevenbergenSG GhoshNo ratings yet
- Abb Relays Catalouge PDFDocument180 pagesAbb Relays Catalouge PDFABDUL GHAFOORNo ratings yet