You might also like
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 pagesKinematic Analysis of 5 Dof Lynx ArmsathyaNo ratings yet
- Position Control of Pick and Place Robotic ArmDocument5 pagesPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- IRM 01 Kinematics Dynamics PDFDocument109 pagesIRM 01 Kinematics Dynamics PDFSexy macho Bon bonNo ratings yet
- Experimenting With The Picbasic Pro CompilerDocument188 pagesExperimenting With The Picbasic Pro Compilerjfg8721100% (2)
- Denavit - Hartenberg AlgorithmDocument30 pagesDenavit - Hartenberg AlgorithmherioshkoshNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- EE4213-Robotics and Mechatronics-Lecture 6-1Document22 pagesEE4213-Robotics and Mechatronics-Lecture 6-1Vishan Yujin WangNo ratings yet
- VHDL Code For Clock Divider (Frequency Divider)Document17 pagesVHDL Code For Clock Divider (Frequency Divider)Ashok kumarNo ratings yet
- Inverse Kinematics PUMA 762 SimulatorDocument1 pageInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarNo ratings yet
- Shift RegistersDocument3 pagesShift RegistersNaveen YallapuNo ratings yet
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 pagesForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonNo ratings yet
- Lab Assignment 8: 1 Sequential Circuit DesignDocument2 pagesLab Assignment 8: 1 Sequential Circuit DesignRehan bhattiNo ratings yet
- 6servo Robot Arm EngDocument18 pages6servo Robot Arm EngĐỗ ThànhNo ratings yet
- Basic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinDocument18 pagesBasic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinPetrus Petz WtzNo ratings yet
- Inverse Kinematics PPT (Pak Toni)Document14 pagesInverse Kinematics PPT (Pak Toni)herawanadifNo ratings yet
- ScaraDocument7 pagesScaraAnand Kumar MishraNo ratings yet
- Universal Shift RegisterDocument2 pagesUniversal Shift RegisterAromal RajNo ratings yet
- Jacobian: Dr. Shady A. MagedDocument44 pagesJacobian: Dr. Shady A. MagedpeterwalidNo ratings yet
- 1 Flexible Link ProjectDocument15 pages1 Flexible Link Projectprasaad08No ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Direct KinematicsDocument66 pagesDirect KinematicsMateen Qadri100% (2)
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderNo ratings yet
- Serial CommunicationDocument48 pagesSerial CommunicationHarshaNo ratings yet
- Forward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsDocument19 pagesForward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsKispandu GuptaNo ratings yet
- ME427 LEC11 Forward KinameticsDocument15 pagesME427 LEC11 Forward KinameticsSohaib IrfanNo ratings yet
- Analytical Inverse Kinematics Algorithm of 5 Dof Robot ArmDocument13 pagesAnalytical Inverse Kinematics Algorithm of 5 Dof Robot ArmsathyaNo ratings yet
- DC Motor Control 2017Document43 pagesDC Motor Control 2017Rasheed ShahNo ratings yet
- Robotics: Dynamic Model of ManipulatorsDocument20 pagesRobotics: Dynamic Model of ManipulatorsbalkyderNo ratings yet
- Lec8 Inverse KinematicsDocument32 pagesLec8 Inverse KinematicsbalkyderNo ratings yet
- Controlling Kuka Industrial Robots Flexible Communication Interface JopenshowvarDocument14 pagesControlling Kuka Industrial Robots Flexible Communication Interface JopenshowvarMihail AvramovNo ratings yet
- Manipulator KinematicsDocument61 pagesManipulator KinematicsHoang Minh ThangNo ratings yet
- Denavit Hartenberg ConventionDocument17 pagesDenavit Hartenberg ConventionRaja RvNo ratings yet
- Shift RegistersDocument23 pagesShift RegistersFasih Ur Rehman BukhariNo ratings yet
- Jacobian and Static ForceDocument35 pagesJacobian and Static ForcesivaeeinfoNo ratings yet
- Assignment of Arm RobotDocument7 pagesAssignment of Arm RobotRikko PutraNo ratings yet
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaNo ratings yet
- VHDL-Lab2 VivadoDocument7 pagesVHDL-Lab2 VivadoInnerlifeNo ratings yet
- Course Code Course Name L-T-P-Credits Year of Introduction ME407 Mechatronics 3-0-0-3 2016 Prerequisite: Nil Course ObjectivesDocument2 pagesCourse Code Course Name L-T-P-Credits Year of Introduction ME407 Mechatronics 3-0-0-3 2016 Prerequisite: Nil Course ObjectivesVivek SivaramanNo ratings yet
- Robotics MotionDocument29 pagesRobotics MotionfenixnomahotmailcomNo ratings yet
- Chapter 6 1Document26 pagesChapter 6 1Nyein Aye MyatNo ratings yet
- Robotic ArmDocument18 pagesRobotic Armbraulio de jesusNo ratings yet
- FSK Demodulator With PLLDocument5 pagesFSK Demodulator With PLLHema100% (1)
- Ambuj Gupta : I. D. No. 46671 ObjectiveDocument1 pageAmbuj Gupta : I. D. No. 46671 ObjectiveAmbujNo ratings yet
- Shift Register SequencesDocument14 pagesShift Register SequencesTony Stark100% (1)
- Arduino Playground - ACPhaseControlDocument7 pagesArduino Playground - ACPhaseControlAnthonyVelasquezMirandaNo ratings yet
- Advance Robotics - Self - Learning Kit - ArduinoDocument68 pagesAdvance Robotics - Self - Learning Kit - ArduinoHarry George ElangbamNo ratings yet
- Rotary Inverted Pendulum: ME 452 Course Project IIDocument25 pagesRotary Inverted Pendulum: ME 452 Course Project IIMohammed BenbrahimNo ratings yet
- Lec9 Velocity KinematicsDocument30 pagesLec9 Velocity KinematicsbalkyderNo ratings yet
- Manipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyDocument50 pagesManipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyRahulGP88% (8)
- Escuela Superior Poltecnica Del Litoral: Facultad de Ingenieria Mecanica Y Ciencias de La ProduccionDocument16 pagesEscuela Superior Poltecnica Del Litoral: Facultad de Ingenieria Mecanica Y Ciencias de La ProduccionChristopher MurilloNo ratings yet
- Robot PDFDocument56 pagesRobot PDFfranklin getialNo ratings yet
- Shift RegistersDocument37 pagesShift RegistersselvaNo ratings yet
- User Manual: CNC RouterDocument31 pagesUser Manual: CNC RouterPIXIDOUNo ratings yet
- Modelling and Simulation of 5 DOFDocument6 pagesModelling and Simulation of 5 DOFaditdharkarNo ratings yet
- Meng 2011Document6 pagesMeng 2011Rodrigo Murillo ArandaNo ratings yet
- Dynamic Behavior of A SCARA RobotDocument16 pagesDynamic Behavior of A SCARA RobotMeryem MimiNo ratings yet
- Solving Kinematics Problems of A 6-DOF Robot Manipulator PDFDocument6 pagesSolving Kinematics Problems of A 6-DOF Robot Manipulator PDFjasyongNo ratings yet
- Modeling and Simulation of 5 DOF Educational Robot ArmDocument6 pagesModeling and Simulation of 5 DOF Educational Robot Armsandeep2506No ratings yet
- Template Fonksiyonlar: Template T Deneme (T A, T B) Int Main (Document1 pageTemplate Fonksiyonlar: Template T Deneme (T A, T B) Int Main (strrrweNo ratings yet
- Real-Valued Compact Genetic Algorithms ForDocument17 pagesReal-Valued Compact Genetic Algorithms ForstrrrweNo ratings yet
- ProjectionsDocument9 pagesProjectionsstrrrweNo ratings yet
- 1996 Multi-Shuttle Automated Storage Retrieval SystemsDocument14 pages1996 Multi-Shuttle Automated Storage Retrieval SystemsstrrrweNo ratings yet
- LhiannanDocument6 pagesLhiannanGreybornNo ratings yet
- Duties and Responsibilities - Filipino DepartmentDocument2 pagesDuties and Responsibilities - Filipino DepartmentEder Aguirre Capangpangan100% (2)
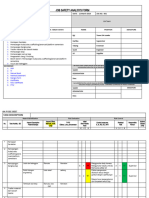
- JSA FormDocument4 pagesJSA Formfinjho839No ratings yet
- Final Grade 7 Lesson Plan REGULAR CLASSDocument10 pagesFinal Grade 7 Lesson Plan REGULAR CLASSCarla SheenNo ratings yet
- MJDF Mcqs - Mixed - PDFDocument19 pagesMJDF Mcqs - Mixed - PDFAyesha Awan0% (3)
- 1.nursing As A ProfessionDocument148 pages1.nursing As A ProfessionveralynnpNo ratings yet
- Computer Science HandbookDocument50 pagesComputer Science HandbookdivineamunegaNo ratings yet
- A Mini-Review On New Developments in Nanocarriers and Polymers For Ophthalmic Drug Delivery StrategiesDocument21 pagesA Mini-Review On New Developments in Nanocarriers and Polymers For Ophthalmic Drug Delivery StrategiestrongndNo ratings yet
- HSG 2023 KeyDocument36 pagesHSG 2023 Keyle827010No ratings yet
- Evidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFDocument62 pagesEvidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFwilliam.tavares69198% (50)
- Risk Management: Questions and AnswersDocument5 pagesRisk Management: Questions and AnswersCentauri Business Group Inc.No ratings yet
- Brochure - Actiwhite PWLS 9860.02012013Document12 pagesBrochure - Actiwhite PWLS 9860.02012013J C Torres FormalabNo ratings yet
- CA Level 2Document50 pagesCA Level 2Cikya ComelNo ratings yet
- New KitDocument195 pagesNew KitRamu BhandariNo ratings yet
- Term Paper A and CDocument9 pagesTerm Paper A and CKishaloy NathNo ratings yet
- MBA 2nd Sem SyllabusDocument6 pagesMBA 2nd Sem SyllabusMohammad Ameen Ul HaqNo ratings yet
- Group 3 Presenta Tion: Prepared By: Queen Cayell Soyenn Gulo Roilan Jade RosasDocument12 pagesGroup 3 Presenta Tion: Prepared By: Queen Cayell Soyenn Gulo Roilan Jade RosasSeyell DumpNo ratings yet
- Agreement - IDP - Transformation Institute - 2023Document16 pagesAgreement - IDP - Transformation Institute - 2023Elite ProgramNo ratings yet
- Northern Lights - 7 Best Places To See The Aurora Borealis in 2022Document15 pagesNorthern Lights - 7 Best Places To See The Aurora Borealis in 2022labendetNo ratings yet
- Case-Based Learning Guide (A)Document19 pagesCase-Based Learning Guide (A)pentagon 5No ratings yet
- Preboard Practice PDFDocument25 pagesPreboard Practice PDFGracielle NebresNo ratings yet
- Comparison of Multi-Coil and Diaphragm Spring ClutchesDocument3 pagesComparison of Multi-Coil and Diaphragm Spring Clutchesmasb_994077No ratings yet
- Idoc - Pub - Pokemon Liquid Crystal PokedexDocument19 pagesIdoc - Pub - Pokemon Liquid Crystal PokedexPerfect SlaNaaCNo ratings yet
- Actara (5 24 01) PDFDocument12 pagesActara (5 24 01) PDFBand Dvesto Plus CrepajaNo ratings yet
- Narrative FixDocument6 pagesNarrative Fixfitry100% (1)
- Dreizler EDocument265 pagesDreizler ERobis OliveiraNo ratings yet
- (LaSalle Initiative) 0Document4 pages(LaSalle Initiative) 0Ann DwyerNo ratings yet
- B1 Editable End-of-Year TestDocument6 pagesB1 Editable End-of-Year TestSyahira Mayadi50% (2)
- New Client QuestionnaireDocument13 pagesNew Client QuestionnairesundharNo ratings yet
- Discrete Random Variables: 4.1 Definition, Mean and VarianceDocument15 pagesDiscrete Random Variables: 4.1 Definition, Mean and VariancejordyswannNo ratings yet