You might also like
- Low and High Frequency Asymptotics: Acoustic, Electromagnetic and Elastic Wave ScatteringFrom EverandLow and High Frequency Asymptotics: Acoustic, Electromagnetic and Elastic Wave ScatteringNo ratings yet
- FEM Simulation of Loud SpeakerDocument10 pagesFEM Simulation of Loud SpeakerRaj KumarNo ratings yet
- A Denoising Approach To Multichannel Signal EstimationDocument4 pagesA Denoising Approach To Multichannel Signal Estimationpraba821No ratings yet
- Acoustic Simulation With FEMDocument47 pagesAcoustic Simulation With FEMAdele Maccario100% (1)
- A Novel, Cost-Effective Method For Loudspeakers Parameters MeasurementDocument7 pagesA Novel, Cost-Effective Method For Loudspeakers Parameters MeasurementdzymytchNo ratings yet
- Acoustic TODAYDocument72 pagesAcoustic TODAYcen1510353No ratings yet
- Reverberation AlgorithmsDocument123 pagesReverberation AlgorithmsFederico ScalasNo ratings yet
- EXcellent Acoustic Book 91843326-eBook-Physics-PDF-Engineering-Acoustics PDFDocument37 pagesEXcellent Acoustic Book 91843326-eBook-Physics-PDF-Engineering-Acoustics PDFconcord1103100% (1)
- Aperture Coupled Patch Antenna Design MethodsDocument4 pagesAperture Coupled Patch Antenna Design MethodsFranky Simanjuntak100% (1)
- FPGA Based Acoustic Modem For Underwater CommunicationDocument4 pagesFPGA Based Acoustic Modem For Underwater CommunicationEditor IJRITCCNo ratings yet
- Noise FigureDocument31 pagesNoise FigureSrdjan MihaljevicNo ratings yet
- Thesis GayathriDocument89 pagesThesis GayathriABHISHEK GOYALNo ratings yet
- Dielectric Waveguide TheoryDocument12 pagesDielectric Waveguide Theorymauricio1906scpNo ratings yet
- Comsol Electric SimulationDocument32 pagesComsol Electric SimulationDott PalmitoNo ratings yet
- Finite Element Analysis of Acoustic ScatteringDocument239 pagesFinite Element Analysis of Acoustic Scatteringdivad101No ratings yet
- Aes3 2003Document29 pagesAes3 2003dj_alekNo ratings yet
- Op Amp 741 TutorialDocument18 pagesOp Amp 741 TutorialStiva DarcyNo ratings yet
- (Modern Acoustics and Signal Processing) Scott D. Snyder (Auth.) - Active Noise Control Primer-Springer-Verlag New York (2000) PDFDocument170 pages(Modern Acoustics and Signal Processing) Scott D. Snyder (Auth.) - Active Noise Control Primer-Springer-Verlag New York (2000) PDFmicky1389No ratings yet
- Aperture Coupled Fed Micro-Strip Patch AntennaDocument5 pagesAperture Coupled Fed Micro-Strip Patch AntennaemremiranNo ratings yet
- Application of Acoustic ImagingDocument13 pagesApplication of Acoustic ImagingRajeuv GovindanNo ratings yet
- Comparison of Noise Removal and Echo Cancellation For Audio SignalsDocument3 pagesComparison of Noise Removal and Echo Cancellation For Audio SignalsamiglaniNo ratings yet
- PhDThesis SunilSudhakaranDocument226 pagesPhDThesis SunilSudhakaranMeenakshi Sundaram KaruppiahNo ratings yet
- Transmission Line Derivation Perry Marshall PDFDocument20 pagesTransmission Line Derivation Perry Marshall PDFmerrickNo ratings yet
- Antenna BasicsDocument27 pagesAntenna BasicsDulce MarconiNo ratings yet
- Tutorial-1 Low Noise Amplifier (LNA) Design: by Rashad.M.Ramzan Rashad@isy - Liu.se ObjectiveDocument18 pagesTutorial-1 Low Noise Amplifier (LNA) Design: by Rashad.M.Ramzan Rashad@isy - Liu.se ObjectiveRakesh Rt100% (1)
- Analog Filter Design Demystified: The Theory of Analog ElectronicsDocument11 pagesAnalog Filter Design Demystified: The Theory of Analog ElectronicsSanjay Parelkar100% (1)
- Awr-Axiem - Understanding Grounding Concepts in em SimulatorsDocument11 pagesAwr-Axiem - Understanding Grounding Concepts in em Simulatorsagmnm1962No ratings yet
- Agilent Noise Figure MeasurementDocument21 pagesAgilent Noise Figure Measurementbionic_man7No ratings yet
- HFSS Tutorial 1Document7 pagesHFSS Tutorial 1Tushar DebnathNo ratings yet
- Concert Hall Acoustic Computer ModelingDocument14 pagesConcert Hall Acoustic Computer ModelingFederico Nahuel CacavelosNo ratings yet
- Radio Test Procedure ManualDocument161 pagesRadio Test Procedure ManualQll Communications100% (1)
- Ec2353 Antennas and Wave PropagationDocument1 pageEc2353 Antennas and Wave PropagationHenri DassNo ratings yet
- LearnEMC - Magnetic-Field Coupling (Inductive Coupling)Document3 pagesLearnEMC - Magnetic-Field Coupling (Inductive Coupling)danitranoster8512No ratings yet
- Wave GuideDocument6 pagesWave GuideYathish H GowdaNo ratings yet
- Aes3 4 2009 100111 F PDFDocument20 pagesAes3 4 2009 100111 F PDFAlex JamesNo ratings yet
- 01050528Document12 pages01050528Mohanavelu SadasivamNo ratings yet
- Low-Latency Convolution For Real-Time ApplicationDocument7 pagesLow-Latency Convolution For Real-Time ApplicationotringalNo ratings yet
- Negative Index of Refraction Draft 1Document15 pagesNegative Index of Refraction Draft 1Shivangi Sharma100% (1)
- An 1026Document6 pagesAn 1026kuazuNo ratings yet
- MIT Radiaton Lab Series V9 Microwave Transmission CircuitsDocument737 pagesMIT Radiaton Lab Series V9 Microwave Transmission Circuitskgrhoads100% (1)
- Optimization of An Acoustic Horn With Respect To EfficiencyDocument36 pagesOptimization of An Acoustic Horn With Respect To EfficiencyArie Westland100% (1)
- 4DG Acoustic Absorption - JayaramanDocument138 pages4DG Acoustic Absorption - JayaramankarlosmpNo ratings yet
- Negative Refraction HistoryDocument6 pagesNegative Refraction HistoryFrancesco RuggieroNo ratings yet
- Ambicoustics - : James MeekerDocument13 pagesAmbicoustics - : James MeekerSDMFerNo ratings yet
- Book Engineering Acoustics.2004Document205 pagesBook Engineering Acoustics.2004Yuan ChengNo ratings yet
- Siemens Absolute EncoderDocument4 pagesSiemens Absolute EncoderAditya Pavan VinjamuriNo ratings yet
- Bessel ArraysDocument6 pagesBessel Arrayssarantapodarusa4009No ratings yet
- Piezoacoustic TransducerDocument16 pagesPiezoacoustic TransducerengrarNo ratings yet
- AES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04Document25 pagesAES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04bqmbqng kqryqntoNo ratings yet
- Closed Box Loudspeaker Systems Part II SynthesisDocument8 pagesClosed Box Loudspeaker Systems Part II SynthesisyodifoyorNo ratings yet
- A MMW Perpendicular Coax-To-microstrip TransitionDocument4 pagesA MMW Perpendicular Coax-To-microstrip Transitionagmnm1962No ratings yet
- Compensation of Loudspeaker Nonlinearities PDFDocument98 pagesCompensation of Loudspeaker Nonlinearities PDFJude Sudario100% (1)
- Product Data: PULSE Acoustic Material Testing in A Tube Type 7758Document4 pagesProduct Data: PULSE Acoustic Material Testing in A Tube Type 7758Joe Boby SoegiartoNo ratings yet
- A4FD1924d01 Wilkinson TheoryDocument4 pagesA4FD1924d01 Wilkinson TheorymrzahzNo ratings yet
- MullardDocument216 pagesMullardsarantapodarusa4009No ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocument14 pagesThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearNo ratings yet
- Ip Multicast Part1Document18 pagesIp Multicast Part1Pallab PalNo ratings yet
- Csat 11Document52 pagesCsat 11Mossad NewsNo ratings yet
- Directed Energy WeaponsDocument368 pagesDirected Energy WeaponsPete Santilli100% (1)
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocument35 pagesThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkNo ratings yet
- DEW Electromagnetic SpectrumDocument3 pagesDEW Electromagnetic SpectrumbingwazzupNo ratings yet
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocument12 pagesUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupNo ratings yet
- The Radio Armateur Microwave Communications HandbookDocument192 pagesThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocument18 pagesApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupNo ratings yet
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocument10 pagesRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupNo ratings yet
- Aerial Laser ScanningDocument244 pagesAerial Laser Scanningbingwazzup100% (1)
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocument11 pagesAn Overview of Acoustic TelemetrybingwazzupNo ratings yet
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocument6 pagesAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Cloning The EmotionsDocument2 pagesCloning The Emotionsbingwazzup100% (1)
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- Infra SoundDocument7 pagesInfra Soundbingwazzup100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocument6 pagesModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- Electromagnetic Weapons TimelineDocument6 pagesElectromagnetic Weapons Timelinebingwazzup100% (1)
- Biological AmplificationDocument2 pagesBiological AmplificationbingwazzupNo ratings yet
- Most Common Known Electronic Low FrequencyDocument4 pagesMost Common Known Electronic Low Frequencybingwazzup100% (1)
- Silent Sound TechnologyDocument2 pagesSilent Sound TechnologybingwazzupNo ratings yet
- Telepathy and The Technology of Mind ControlDocument18 pagesTelepathy and The Technology of Mind Controlbingwazzup100% (2)
- Pulsed Microwave TechnologyDocument2 pagesPulsed Microwave TechnologybingwazzupNo ratings yet
- Macro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresDocument11 pagesMacro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresSri SaiNo ratings yet
- UBC CHBE 251 - Fluid Mechanics - Problems From Past FinalsDocument14 pagesUBC CHBE 251 - Fluid Mechanics - Problems From Past FinalsflybossladiNo ratings yet
- JPT 3 Paper 2 EnglishDocument25 pagesJPT 3 Paper 2 Englishzapdos8No ratings yet
- Emwf - t185 QsDocument6 pagesEmwf - t185 QsSiva KumarNo ratings yet
- Tomas Liko and Louis H Kauffman - Knot Theory and A Physical State of Quantum GravityDocument29 pagesTomas Liko and Louis H Kauffman - Knot Theory and A Physical State of Quantum GravityLopmazNo ratings yet
- The Gravity Tunnel in A Non-Uniform EarthDocument8 pagesThe Gravity Tunnel in A Non-Uniform EarthAlain RiverosNo ratings yet
- Aashto M332-14Document8 pagesAashto M332-14tony juarezNo ratings yet
- Projectile MotionDocument2 pagesProjectile Motionashok pradhanNo ratings yet
- 3.1 Dynamics (Scalars and Vectors, Pressure)Document4 pages3.1 Dynamics (Scalars and Vectors, Pressure)SalmanNo ratings yet
- Elastic Column Buckling and The Effect of End RestraintDocument2 pagesElastic Column Buckling and The Effect of End RestraintSandeep VaishnavNo ratings yet
- S. Y. B. Tech. (Civil Engineering) - I, Semester-III: Course ContentDocument5 pagesS. Y. B. Tech. (Civil Engineering) - I, Semester-III: Course ContentashoknrNo ratings yet
- Strcteng200 S1 2022Document7 pagesStrcteng200 S1 2022ChengNo ratings yet
- Viscosity Measurement: June EditionDocument5 pagesViscosity Measurement: June EditionDea AbdiNo ratings yet
- CRTICAL Force and Moment Outputs From SAP2000: SLS ULS Bending Moment (M), Shear Force (V) & Direct Tension (T)Document4 pagesCRTICAL Force and Moment Outputs From SAP2000: SLS ULS Bending Moment (M), Shear Force (V) & Direct Tension (T)risrizNo ratings yet
- Circular Motion and Work EnergyDocument78 pagesCircular Motion and Work EnergyPortia A. EgkenNo ratings yet
- 19ASC303A Assignment 7 PDFDocument3 pages19ASC303A Assignment 7 PDFRD412No ratings yet
- Chapter 13: Kinetics of A Particle: Force and Acceleration: 13.1 Newton's Laws of MotionDocument5 pagesChapter 13: Kinetics of A Particle: Force and Acceleration: 13.1 Newton's Laws of MotionideepujNo ratings yet
- Force Method 1 PDFDocument44 pagesForce Method 1 PDFNG MOLLANIDANo ratings yet
- Physical Chemistry - Kinetic T3kDocument9 pagesPhysical Chemistry - Kinetic T3ksolhhNo ratings yet
- Machine Tool StructuresDocument10 pagesMachine Tool StructuresLowry GuettaNo ratings yet
- 11 Physics RevisionNotes Chapter 4 PDFDocument8 pages11 Physics RevisionNotes Chapter 4 PDFnellai kumarNo ratings yet
- Stresses Due To RotationDocument18 pagesStresses Due To Rotationwickedsinner7No ratings yet
- Physical Pendulum: ExperimentDocument6 pagesPhysical Pendulum: ExperimentJimNo ratings yet
- Solution: Principle of Work and Energy: Referring To The Free-Body Diagram of TheDocument5 pagesSolution: Principle of Work and Energy: Referring To The Free-Body Diagram of TheESTHEFANI PAOLA FONSECA MENDOZANo ratings yet
- Ultrasonics & Non Destructive TestingDocument4 pagesUltrasonics & Non Destructive TestingMahesh Lohith K.S100% (1)
- Solutions: 4. Tunnel Diode (8 PTS) 1) 2) F 0Document2 pagesSolutions: 4. Tunnel Diode (8 PTS) 1) 2) F 0Kolisetty SudhakarNo ratings yet
- Plain & Reinforced Concrete-1: Lecture # 2Document14 pagesPlain & Reinforced Concrete-1: Lecture # 2Manoj BalakrishnanNo ratings yet
- ESSAY ONE - Idiomaterial PhysicsDocument49 pagesESSAY ONE - Idiomaterial PhysicsMichael Lee Hill100% (2)
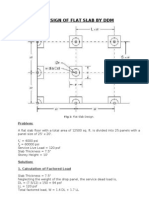
- Design of Flat Slab by DDMDocument16 pagesDesign of Flat Slab by DDMNafees Imitaz100% (1)
- Technical Paper - DynamometerDocument5 pagesTechnical Paper - Dynamometerविशाल पुडासैनीNo ratings yet