You might also like
- Case Study - Alarm SystemDocument16 pagesCase Study - Alarm SystemNurZul HealMe0% (1)
- Tessent Ijtag ManualDocument10 pagesTessent Ijtag ManualJecsNo ratings yet
- Assignment1 Part2 Comp201 2017Document5 pagesAssignment1 Part2 Comp201 2017jscansinoNo ratings yet
- Advanced Lua Scripting - MySQL ProxyDocument54 pagesAdvanced Lua Scripting - MySQL ProxyMikhail MiguelNo ratings yet
- Literature Review Fire Alarm SystemDocument5 pagesLiterature Review Fire Alarm Systemea8r2tyk100% (1)
- CS 589 Project Smart Home Hub, Phase I: Due Before 9am On October 21, 2015Document10 pagesCS 589 Project Smart Home Hub, Phase I: Due Before 9am On October 21, 2015asrNo ratings yet
- 4 5780930464638307478 PDFDocument49 pages4 5780930464638307478 PDFYihun DesalegnNo ratings yet
- Smart Fire Alarm System Using ArduinoDocument2 pagesSmart Fire Alarm System Using Arduinokritwik barua100% (1)
- Home Final 1Document19 pagesHome Final 1ajoyNo ratings yet
- Sensors: Funblocks. A Modular Framework For Ami System DevelopmentDocument33 pagesSensors: Funblocks. A Modular Framework For Ami System DevelopmentIliana GarcíaNo ratings yet
- Mini Project Report On: Home AutomationDocument73 pagesMini Project Report On: Home AutomationTeja RaghuNo ratings yet
- Research Proposal On Fire Detection and Control SystemDocument16 pagesResearch Proposal On Fire Detection and Control Systemsewagegnehu belachewuNo ratings yet
- Fire Alarm and Mass Notification SystemsDocument10 pagesFire Alarm and Mass Notification SystemsjojoNo ratings yet
- A19 Surya Devistamped eDocument7 pagesA19 Surya Devistamped eAseel QasaimehNo ratings yet
- Literature Review On Fire Alarm SystemDocument7 pagesLiterature Review On Fire Alarm Systemafmzveozwsprug100% (1)
- A Electronic NoseDocument12 pagesA Electronic NosePrathamesh ParitNo ratings yet
- Review of Related Literature and StudiesDocument6 pagesReview of Related Literature and StudiesImadeadwriter WP0% (1)
- Dec Ijmte - 1414Document7 pagesDec Ijmte - 1414Swastik JainNo ratings yet
- Home Automation: Seminar Report ONDocument29 pagesHome Automation: Seminar Report ONapi-3730473No ratings yet
- Active Infrared Motion Detector For House Security SystemDocument24 pagesActive Infrared Motion Detector For House Security SystemIsuru Chamath Hettiarachchi100% (1)
- Enhanced Model of RoboticsDocument5 pagesEnhanced Model of RoboticsTejaChNo ratings yet
- Fire Alarm Panel ProgrammingDocument43 pagesFire Alarm Panel Programmingfatehmohamad06No ratings yet
- Autonomous Fire-Detection System Using Adaptive Sensory Fusion For Intelligent Security RobotDocument8 pagesAutonomous Fire-Detection System Using Adaptive Sensory Fusion For Intelligent Security RobotUdhgeeth TechNo ratings yet
- Domotics - Practical Implementation and General Concepts: EssayDocument5 pagesDomotics - Practical Implementation and General Concepts: EssayRodrigo Flores EspinaNo ratings yet
- WP Software Design Dec08 en 2 Lektorat (2) - CorrectedDocument9 pagesWP Software Design Dec08 en 2 Lektorat (2) - CorrectedbattikaNo ratings yet
- Blue PrintDocument11 pagesBlue Printcvr9y4x4xpNo ratings yet
- Accurate Activity Recognition in A Home SettingDocument9 pagesAccurate Activity Recognition in A Home SettingmounamalarNo ratings yet
- Alarm System Design YA711Document25 pagesAlarm System Design YA711bui111100% (4)
- Report On A Touch Sensor Alarm Circuit Using A BreadboardDocument5 pagesReport On A Touch Sensor Alarm Circuit Using A BreadboardVicks TechnologyNo ratings yet
- Research Paper On Embedded Systems PDFDocument5 pagesResearch Paper On Embedded Systems PDFjrcrefvhf100% (1)
- An SMS Based Fire Alarm and Detection System: Izang, A. A., Ajayi, S. W., Onyenwenu, C. B., Adeniyi, F., &adepoju, ADocument4 pagesAn SMS Based Fire Alarm and Detection System: Izang, A. A., Ajayi, S. W., Onyenwenu, C. B., Adeniyi, F., &adepoju, AasdasdaNo ratings yet
- Saving Energy in HomeDocument7 pagesSaving Energy in HomeShubham PhadtareNo ratings yet
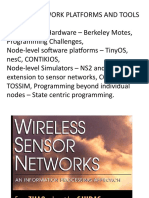
- Sensor Hardware: Networks, SPINS. The Chief Contributions AreDocument22 pagesSensor Hardware: Networks, SPINS. The Chief Contributions AreJimmy PappachanNo ratings yet
- Smart Home Security System CSE 326Document8 pagesSmart Home Security System CSE 326creativedesignbd24No ratings yet
- Developed Intelligent Fire Alarm System: Journal of American Science October 2012Document11 pagesDeveloped Intelligent Fire Alarm System: Journal of American Science October 2012Al Amin Hossain SrabonNo ratings yet
- Architecture of A Identity Based Firewall SystemDocument9 pagesArchitecture of A Identity Based Firewall SystemAIRCC - IJNSANo ratings yet
- Statistical Analysis and Prioritisation of Alarms in Mobile NetworksDocument18 pagesStatistical Analysis and Prioritisation of Alarms in Mobile NetworksAnonymous RrGVQjNo ratings yet
- Early Detection System For Gas Leakage and Fire in Smart Home Using Machine LearningDocument6 pagesEarly Detection System For Gas Leakage and Fire in Smart Home Using Machine LearningSourav DebnathNo ratings yet
- Agents in Domestic EnvironmentsDocument8 pagesAgents in Domestic EnvironmentsYawgmoth88No ratings yet
- Alarm System EngineeringDocument46 pagesAlarm System Engineeringjerome.deschenes1522No ratings yet
- Study DesignDocument11 pagesStudy DesignsalimaicagoilanNo ratings yet
- Developing A Common Language For IED Communications in The SDocument11 pagesDeveloping A Common Language For IED Communications in The Scopion82No ratings yet
- Sensor Network Simulation in GUI: P.Senthil and S.Raghavendran Assitant ProfessorDocument6 pagesSensor Network Simulation in GUI: P.Senthil and S.Raghavendran Assitant ProfessorRakeshconclaveNo ratings yet
- Group 3.building Fire Protection System DesignDocument26 pagesGroup 3.building Fire Protection System DesignAngelika Lei GaraoNo ratings yet
- Arduino Based Fire Detection and Control SystemDocument7 pagesArduino Based Fire Detection and Control SystemJatin KateriyaNo ratings yet
- Vol 10, Issue 11, NOV/ 2019 ISSN NO: 0377-9254: S Karishma, K Suresh, B Sireesha, S Arif HussainDocument8 pagesVol 10, Issue 11, NOV/ 2019 ISSN NO: 0377-9254: S Karishma, K Suresh, B Sireesha, S Arif Hussain00007sbrNo ratings yet
- Smart Fire Warning System IJERTV5IS010466Document4 pagesSmart Fire Warning System IJERTV5IS010466Deepak ReddyNo ratings yet
- TextDocument66 pagesTextneelesh dokiNo ratings yet
- Unit VDocument168 pagesUnit VrajaganabathiNo ratings yet
- Fire Notification SystemDocument19 pagesFire Notification SystemDaivik ChaulkarNo ratings yet
- Fire Alarm Detection System With Short Service Message (SMS) TechnologyDocument29 pagesFire Alarm Detection System With Short Service Message (SMS) Technologypeter vander100% (1)
- Es LQDocument18 pagesEs LQpratikdas21012001No ratings yet
- Fas Directory 04-04-2020Document44 pagesFas Directory 04-04-2020aman aroraNo ratings yet
- Automatic Electrical Appliances Control Panel Based On Infrared and Wi-Fi: A Framework For Electrical Energy ConservationDocument7 pagesAutomatic Electrical Appliances Control Panel Based On Infrared and Wi-Fi: A Framework For Electrical Energy ConservationCharan CherryNo ratings yet
- Advanced Electronic Protection System To Prevent Exam Paper LeakagesDocument135 pagesAdvanced Electronic Protection System To Prevent Exam Paper LeakagesSyed Viquar AhmedNo ratings yet
- Ultrasonic Navigation For Blind With Audio Interface DocumentationDocument55 pagesUltrasonic Navigation For Blind With Audio Interface DocumentationGoutham Raj Mode60% (5)
- Fire Alarm ThesisDocument8 pagesFire Alarm Thesiswssotgvcf100% (1)
- Training: Appin TechnologiesDocument52 pagesTraining: Appin TechnologiesKaran SinghNo ratings yet
- 3612 Ijdps 04Document19 pages3612 Ijdps 04atheeq ahmedNo ratings yet
- Electronic Instrument Handbook Third EditionDocument1,217 pagesElectronic Instrument Handbook Third Editionhashemowida100% (39)
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- 15.2 Logic Circuits, Boolean Algebra, FlipFlopDocument11 pages15.2 Logic Circuits, Boolean Algebra, FlipFlopkimNo ratings yet
- HomeWork - 05Document12 pagesHomeWork - 05ShantanuNo ratings yet
- Quad Low Side Driver: Multipower BCD TechnologyDocument9 pagesQuad Low Side Driver: Multipower BCD TechnologySidnei100% (1)
- Data Structure Algorithm CH 1Document71 pagesData Structure Algorithm CH 1tamirat zemenuNo ratings yet
- CyberAces Module1-Linux 3 CoreCommandsDocument19 pagesCyberAces Module1-Linux 3 CoreCommandsPedro FreitasNo ratings yet
- How To Cluster Odoo 12 With PostgreSQL Streaming Replication For High Availability - SeveralninesDocument13 pagesHow To Cluster Odoo 12 With PostgreSQL Streaming Replication For High Availability - SeveralninesIdris IdrisNo ratings yet
- Fluke DTX 1800 GuideDocument18 pagesFluke DTX 1800 GuideOscar GuarnizoNo ratings yet
- BK Command Line Installation 20160829Document266 pagesBK Command Line Installation 20160829MansoorNo ratings yet
- Userfiles File Downloads TS-XL Series 1.57 ChangelogDocument14 pagesUserfiles File Downloads TS-XL Series 1.57 ChangelogAtlas JohnNo ratings yet
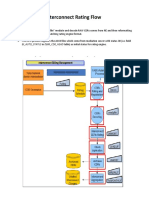
- Interconnect Rating FlowDocument5 pagesInterconnect Rating FlowShahzad AlviNo ratings yet
- Java - Core Java ExercisesDocument5 pagesJava - Core Java Exercisesapi-3728136No ratings yet
- 26 09 43 - Lighting Control SystemDocument11 pages26 09 43 - Lighting Control Systemfahimyaseen8175No ratings yet
- DTHUB API Automation CourseDocument13 pagesDTHUB API Automation CourseHarry HarryNo ratings yet
- StreamsDocument18 pagesStreamsRiki BiswasNo ratings yet
- Microcontroller 8051, Instruction SetDocument140 pagesMicrocontroller 8051, Instruction Setgopir28No ratings yet
- CATV Products BrochureDocument56 pagesCATV Products BrochurePhilip SaundersNo ratings yet
- Module 4: Physical Layer: Introduction To Networks v7.0 (ITN)Document42 pagesModule 4: Physical Layer: Introduction To Networks v7.0 (ITN)Nguyễn Thị Thùy LinhNo ratings yet
- Heritage Institute of Technology Kolkata: List of Components: Name Quantity Components U1 1 U2 1 D1 1 CODEDocument4 pagesHeritage Institute of Technology Kolkata: List of Components: Name Quantity Components U1 1 U2 1 D1 1 CODEantoreep ghatakNo ratings yet
- FPGA TechnologyDocument26 pagesFPGA TechnologyvinaypantraNo ratings yet
- Java Assignment 2Document4 pagesJava Assignment 2Arkoprabho DuttaNo ratings yet
- Apache Spark Analytics Made SimpleDocument76 pagesApache Spark Analytics Made SimpleNaceur ElNo ratings yet
- Onefs Cli Administration Guide 7 2Document928 pagesOnefs Cli Administration Guide 7 2eshu0123456789No ratings yet
- Esquema Elétrico Comando 3HAC024480-005 Rev08Document157 pagesEsquema Elétrico Comando 3HAC024480-005 Rev08pehhhhhNo ratings yet
- EE 351 Spring 2021 Homework 6 SolutionsDocument21 pagesEE 351 Spring 2021 Homework 6 SolutionsKalenNo ratings yet
- Matching in Analog Integrated Circuits: Viswakiran Popuri 10/28/2009Document9 pagesMatching in Analog Integrated Circuits: Viswakiran Popuri 10/28/2009Mahesh Gowtham Reddy NNo ratings yet
- CSE 2005 - Operating Systems Lab Final Assessment TestDocument3 pagesCSE 2005 - Operating Systems Lab Final Assessment TestMansi SinghNo ratings yet
- Server Job Developer'sDocument776 pagesServer Job Developer'sRoberto Iriarte VillanuevaNo ratings yet
- Natural System VariablesDocument68 pagesNatural System VariablesEVANGELION20150% (1)