You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Rockfall Design Considerations For Passive Protection StructuresDocument96 pagesRockfall Design Considerations For Passive Protection StructuresMHavoc100% (1)
- The Dynamic EarthDocument2 pagesThe Dynamic EartharmenianpricessNo ratings yet
- Soil Cons and Eng PDFDocument97 pagesSoil Cons and Eng PDFsasirekaNo ratings yet
- 9-Early Magmatic & Nickel Laterite DepositDocument79 pages9-Early Magmatic & Nickel Laterite DepositotongjefriNo ratings yet
- Biographical-Geographical PowerPointDocument21 pagesBiographical-Geographical PowerPointsfindley1970100% (1)
- Stewards of The Coast and Redwoods Newsletter, Spring 2009Document8 pagesStewards of The Coast and Redwoods Newsletter, Spring 2009ZormpalaKonstantinaNo ratings yet
- Se 312 CH 3 - Triangulation SurveyDocument20 pagesSe 312 CH 3 - Triangulation SurveyMark Jeric UbiasNo ratings yet
- MMR ReportDocument10 pagesMMR ReportRimjhim BajpaiNo ratings yet
- An Integrated Analysis of Landsat OLI Image and Satellite Gravity Data For Geological Mapping in North Kordofan State, SudanDocument8 pagesAn Integrated Analysis of Landsat OLI Image and Satellite Gravity Data For Geological Mapping in North Kordofan State, SudanSrikanth JutruNo ratings yet
- Postgis-1 5 PDFDocument326 pagesPostgis-1 5 PDFJuan Carlos CamachoNo ratings yet
- Terrestrial Sampling Formal ReportDocument9 pagesTerrestrial Sampling Formal ReportJohn Jerald VillamancaNo ratings yet
- IELTS Map VocabularyDocument8 pagesIELTS Map VocabularyMasud RanaNo ratings yet
- Muslim Contribution To GeographyDocument4 pagesMuslim Contribution To Geographymdnoyon-2016112629No ratings yet
- Urban and Regional Planning HistoryDocument39 pagesUrban and Regional Planning HistoryLenard O. Melgar100% (1)
- Bento's Sketchbook. John Berger (Libro Digital)Document234 pagesBento's Sketchbook. John Berger (Libro Digital)Susana0% (2)
- Daftar PustakaDocument6 pagesDaftar PustakaShalaho D DevyNo ratings yet
- E&G - Quaternary Science Journal Vol. 59 No 1 - 2Document176 pagesE&G - Quaternary Science Journal Vol. 59 No 1 - 2Geozon Science MediaNo ratings yet
- Magnetic CompassDocument36 pagesMagnetic CompassRajeewa Wickramahewage100% (1)
- 3.0 Pipeline Construction and InstallationDocument14 pages3.0 Pipeline Construction and InstallationbharathaninNo ratings yet
- Royal Enfield Himalayan OdysseyDocument11 pagesRoyal Enfield Himalayan OdysseyV B Shiva PrasadNo ratings yet
- Yifred KassaDocument114 pagesYifred Kassamacklyn tyanNo ratings yet
- Flymaster NAV Manual EN v2 PDFDocument52 pagesFlymaster NAV Manual EN v2 PDFRoberto PlevanoNo ratings yet
- A Mini Project Report ON Assesment of Water Quality Index For The Groundwater in Upper Pincha BasinDocument41 pagesA Mini Project Report ON Assesment of Water Quality Index For The Groundwater in Upper Pincha BasinACHYUTHA ANILNo ratings yet
- Air NavigationDocument19 pagesAir NavigationRaja Drive100% (3)
- Chapter #7 Principles of MarketingDocument34 pagesChapter #7 Principles of Marketingkoibitoryu83% (6)
- Cornell Notes TemplateDocument2 pagesCornell Notes Templateapi-550376277No ratings yet
- Moon MansionsDocument41 pagesMoon Mansionsfoqi007100% (1)
- From The Book of The Dead PoemDocument7 pagesFrom The Book of The Dead PoemHenz Antoinette Yu SicoNo ratings yet
- AqueductsDocument34 pagesAqueductsMayyee Kumar0% (1)
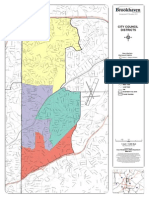
- City of Brookhaven, GA Council DistrictsDocument1 pageCity of Brookhaven, GA Council DistrictsBrookhaven PostNo ratings yet