You might also like
- Pitch-Controlled Variable-Speed Wind Turbine Generation: E. Muljadi and C.P. ButterfieldDocument10 pagesPitch-Controlled Variable-Speed Wind Turbine Generation: E. Muljadi and C.P. ButterfieldminastirNo ratings yet
- Soft-Stall Control Control For Small Power Regulation Furling D TurbineDocument12 pagesSoft-Stall Control Control For Small Power Regulation Furling D TurbineHitesh JoshiNo ratings yet
- Effects_of_turbulence_on_power_generation_for_variDocument11 pagesEffects_of_turbulence_on_power_generation_for_vari201125.eeeNo ratings yet
- Fixed-Speed and Variable-Slip Wind Turbines Providing Spinning Reserves To The GridDocument7 pagesFixed-Speed and Variable-Slip Wind Turbines Providing Spinning Reserves To The GridVivek AnandanNo ratings yet
- Lidar For Turbine Control: March 1, 2005 - November 30, 2005Document55 pagesLidar For Turbine Control: March 1, 2005 - November 30, 2005Jeferson Tondo AlvesNo ratings yet
- Power quality aspects of wind power plantsDocument11 pagesPower quality aspects of wind power plantsmielle ricardoNo ratings yet
- Investigation of SEIG For Wind Turbine PDFDocument9 pagesInvestigation of SEIG For Wind Turbine PDFDallie KurniawanNo ratings yet
- Pitch Controlled Variable Speed For WTDocument10 pagesPitch Controlled Variable Speed For WTArikson SantanaNo ratings yet
- ... Power Plant Cycling Costs...Document83 pages... Power Plant Cycling Costs...Sundara VeerrajuNo ratings yet
- Certification Testing For Small Wind Turbines: D. Corbus, H. Link, S. Butterfield, C. Stork, and C. Newcomb T. SasseenDocument10 pagesCertification Testing For Small Wind Turbines: D. Corbus, H. Link, S. Butterfield, C. Stork, and C. Newcomb T. SasseenAmlan DasNo ratings yet
- Wind Turbine TechnologyDocument17 pagesWind Turbine Technologymnt6176No ratings yet
- ERCOT's Dynamic Wind Turbine ModelsDocument12 pagesERCOT's Dynamic Wind Turbine ModelsMaha SoeNo ratings yet
- Frequency Regulation Methods for Wind PlantsDocument9 pagesFrequency Regulation Methods for Wind PlantsALI BOUKHRISSNo ratings yet
- Short-Circuit Modeling of A Wind Power PlantDocument12 pagesShort-Circuit Modeling of A Wind Power PlantDavid Jose Poma GuillenNo ratings yet
- Power Quality Issues in A Hybrid Power System: PreprintDocument12 pagesPower Quality Issues in A Hybrid Power System: PreprintsimbarasheNo ratings yet
- 1 s2.0 S0045790608000906 MainDocument14 pages1 s2.0 S0045790608000906 MainKaderNo ratings yet
- Marine Hydrokinetic Turbine Power-Take-Off Design For Optimal Performance and Low Impact On Cost-of-EnergyDocument11 pagesMarine Hydrokinetic Turbine Power-Take-Off Design For Optimal Performance and Low Impact On Cost-of-EnergyaseNo ratings yet
- Wind Energy Technology: Current Status and R&D FutureDocument24 pagesWind Energy Technology: Current Status and R&D FutureBarkath DynamoNo ratings yet
- Nrel PV String To 3-Phase Inverter With The Highest V CapabilitiesDocument38 pagesNrel PV String To 3-Phase Inverter With The Highest V CapabilitieshaniNo ratings yet
- Rams DraftDocument7 pagesRams DraftSuan, Mike E.No ratings yet
- Electrical System in Pumped Storage Hydro Power PlantsDocument39 pagesElectrical System in Pumped Storage Hydro Power PlantsAvishek DasNo ratings yet
- Adaptive Torque Control of Variable Speed Wind Turbines: August 2004 - NREL/TP-500-36265Document107 pagesAdaptive Torque Control of Variable Speed Wind Turbines: August 2004 - NREL/TP-500-36265zeldinoNo ratings yet
- Iet-Rpg 2010 0208Document10 pagesIet-Rpg 2010 0208ALI BOUKHRISSNo ratings yet
- Intech-Small Wind Turbine Power Controllers PDFDocument25 pagesIntech-Small Wind Turbine Power Controllers PDFTedros KassaNo ratings yet
- AC Motor Control DSP, MCU or FPGADocument3 pagesAC Motor Control DSP, MCU or FPGAWuliohNo ratings yet
- Vibration Analysis PDFDocument157 pagesVibration Analysis PDFVinayak RaoNo ratings yet
- Modern Control Design For Flexible Wind Turbines: July 2004 - NREL/TP-500-35816Document233 pagesModern Control Design For Flexible Wind Turbines: July 2004 - NREL/TP-500-35816Duyên Nguyễn NgọcNo ratings yet
- Ijert Ijert: Simulation and Performance Analysis of SFIG and DFIG Systems For Wind TurbinesDocument6 pagesIjert Ijert: Simulation and Performance Analysis of SFIG and DFIG Systems For Wind TurbinesR.SRIKANTHNo ratings yet
- Soft Starter Investigation On Grid Connection of Wind TurbinesDocument8 pagesSoft Starter Investigation On Grid Connection of Wind TurbinesPradip KhatriNo ratings yet
- New Formula To Determine The Minimum Capacitance Required For Self-Excited Induction GeneratorDocument8 pagesNew Formula To Determine The Minimum Capacitance Required For Self-Excited Induction GeneratorkarlTronxoNo ratings yet
- Modeling and Simulation of 1.5MW Wind TurbineDocument3 pagesModeling and Simulation of 1.5MW Wind TurbineInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wind Turbine Dynamic Models for Grid IntegrationDocument8 pagesWind Turbine Dynamic Models for Grid IntegrationAkhilesh PanwarNo ratings yet
- Applicability of Nacelle Anemometer Measurements For Use in Turbine Power Performance TestsDocument22 pagesApplicability of Nacelle Anemometer Measurements For Use in Turbine Power Performance TestshonyNo ratings yet
- Effect of Blade Torsion On Modeling Results For The Small Wind Research Turbine (SWRT)Document12 pagesEffect of Blade Torsion On Modeling Results For The Small Wind Research Turbine (SWRT)deathjester1No ratings yet
- Tutorial of Wind Turbine Control For Supporting Grid Frequency Through Active Power ControlDocument14 pagesTutorial of Wind Turbine Control For Supporting Grid Frequency Through Active Power ControlchacherNo ratings yet
- Improved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorDocument24 pagesImproved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorUday WankarNo ratings yet
- Effect of AVR and PSS Onpower System TRansient) Wind MSDocument7 pagesEffect of AVR and PSS Onpower System TRansient) Wind MSmariaNo ratings yet
- Iet-Rpg 2010 0233Document7 pagesIet-Rpg 2010 0233ALI BOUKHRISSNo ratings yet
- Symmetrical and Unsymmetrical Fault Currents of Wind Power Plants: Characteristics and ModelingDocument10 pagesSymmetrical and Unsymmetrical Fault Currents of Wind Power Plants: Characteristics and Modelingouali fatehNo ratings yet
- cycleCCplant PDFDocument19 pagescycleCCplant PDFJohn Bihag100% (1)
- Hybrid Power System With A Controlled Energy Storage: PreprintDocument9 pagesHybrid Power System With A Controlled Energy Storage: Preprintrpk8585No ratings yet
- Controlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionDocument5 pagesControlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Controller Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueDocument6 pagesController Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueAnandDuraiNo ratings yet
- Aggregated Wind Park Models For Analyzing Power System DynamicsDocument10 pagesAggregated Wind Park Models For Analyzing Power System Dynamicsmohamed faisalNo ratings yet
- Pitch Angle ControlDocument6 pagesPitch Angle ControlniraulNo ratings yet
- Converter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesDocument5 pagesConverter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesijcsnNo ratings yet
- Integration of Variable Speed Hydropower Generation and VSC HVDC - AbbDocument10 pagesIntegration of Variable Speed Hydropower Generation and VSC HVDC - AbbDeepak GehlotNo ratings yet
- Ieee 2Document6 pagesIeee 2Harsha VardhanNo ratings yet
- 528 Ici PC I Free Governor ModeDocument6 pages528 Ici PC I Free Governor ModeNguyễn Hữu LượngNo ratings yet
- 5 Electrical Network (61) (12vd)Document61 pages5 Electrical Network (61) (12vd)Thắng ĐìnhNo ratings yet
- Enhancing Frequency Response Control by DFIGsDocument9 pagesEnhancing Frequency Response Control by DFIGsoctober87No ratings yet
- Limite Reactiva DFIGDocument9 pagesLimite Reactiva DFIGMartin__PringleNo ratings yet
- NREL Novel Electrolyzer Applications Providing More Than Just Hydrogen PDFDocument35 pagesNREL Novel Electrolyzer Applications Providing More Than Just Hydrogen PDFJosePPMolinaNo ratings yet
- Concepts, Technical Requirements, and Provision From WindDocument52 pagesConcepts, Technical Requirements, and Provision From WindWerner Fica DuranNo ratings yet
- Wind Generation SystemDocument9 pagesWind Generation SystemShreya BagariaNo ratings yet
- Small Wind Turbine ControllersDocument25 pagesSmall Wind Turbine Controllersgabrielitos7891No ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Small Wind: Planning and Building Successful InstallationsFrom EverandSmall Wind: Planning and Building Successful InstallationsRating: 5 out of 5 stars5/5 (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Small Wind Turbine Testing and Applications DevelopmentDocument8 pagesSmall Wind Turbine Testing and Applications Developmentamro_mahdyNo ratings yet
- 6.5.1 Earthing Systems Basic Constructional AspectsDocument16 pages6.5.1 Earthing Systems Basic Constructional AspectsbehnamatgNo ratings yet
- Lab 9Document9 pagesLab 9amro_mahdyNo ratings yet
- IPDocument2 pagesIPamro_mahdyNo ratings yet
- Tank and Vessel Trace Heating Thermon Temperature Maintenance and Frost Protection HeetSheet Spec SheetDocument2 pagesTank and Vessel Trace Heating Thermon Temperature Maintenance and Frost Protection HeetSheet Spec SheetCarlos SopasNo ratings yet
- Accelerator Ap PsDocument2 pagesAccelerator Ap PsRazvan RaduNo ratings yet
- Elektrisk (Katalog - Ermax)Document267 pagesElektrisk (Katalog - Ermax)ionel1987No ratings yet
- Quantum Mechanics PDFDocument3 pagesQuantum Mechanics PDFAnmol BansalNo ratings yet
- Hazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanDocument7 pagesHazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanFaisal AkhterNo ratings yet
- F 1412 - 01 - Rje0mtiDocument6 pagesF 1412 - 01 - Rje0mtiYasmin AminNo ratings yet
- Unit 4Document36 pagesUnit 4hisuresh196No ratings yet
- Second Law of Thermodynamics 1Document16 pagesSecond Law of Thermodynamics 1Lone KnightNo ratings yet
- Wind Turbine Blade Design: Joseph Rand The Kidwind Project 877-917-0079Document18 pagesWind Turbine Blade Design: Joseph Rand The Kidwind Project 877-917-0079Ad Man GeTigNo ratings yet
- Chapter 3b Fugacity and Fugacity Coefficient For MixtureDocument26 pagesChapter 3b Fugacity and Fugacity Coefficient For MixtureSeptiana AyuningtiasNo ratings yet
- UiiuDocument20 pagesUiiupravi2010No ratings yet
- Fuel and EmissionsDocument221 pagesFuel and Emissionsthomas rulduNo ratings yet
- Soil Mechanics Problems QBDocument4 pagesSoil Mechanics Problems QBKalasekar M SwamyNo ratings yet
- Lunaire CE0932W 3 ManualDocument47 pagesLunaire CE0932W 3 ManualDanNo ratings yet
- Mechanical Engineering Design Drawings CollectionDocument41 pagesMechanical Engineering Design Drawings CollectiongundhiufsNo ratings yet
- CAT 320/323GC Electrical DiagramDocument33 pagesCAT 320/323GC Electrical DiagramSammyNo ratings yet
- Curvilinear Motion and ProjectilesDocument15 pagesCurvilinear Motion and ProjectilesAltammar1367% (3)
- PA66 Ultramid A4H BASFDocument2 pagesPA66 Ultramid A4H BASFAlan MoraisNo ratings yet
- 2016 3 1 4 ClucasDocument18 pages2016 3 1 4 ClucasAhmed S. El DenNo ratings yet
- Cutlas Motor ReparaciónDocument24 pagesCutlas Motor ReparaciónfeaaNo ratings yet
- Memoria Muro Mamposteria Escalera QuickMasonryDocument7 pagesMemoria Muro Mamposteria Escalera QuickMasonryJulio Marcial Ramos QuinteroNo ratings yet
- Engineering Plastic Properties and Processing GuidelinesDocument28 pagesEngineering Plastic Properties and Processing GuidelinesSamuel Berger VeltenNo ratings yet
- Specification Chart of Pipes - Stainless Steel - Seamless Pipe - Mild Steel - Hollow SteelDocument3 pagesSpecification Chart of Pipes - Stainless Steel - Seamless Pipe - Mild Steel - Hollow SteelSunitha KumariNo ratings yet
- 2006 VA Powertrain SprinterDocument292 pages2006 VA Powertrain Sprinteractuator79100% (2)
- Api Bottom Load ValveDocument2 pagesApi Bottom Load ValveMạnh Ngô ĐứcNo ratings yet
- Adjust Valve Clearance Land Cruiser Prado 1KZ-TE EngineDocument5 pagesAdjust Valve Clearance Land Cruiser Prado 1KZ-TE EngineGeraldineHuayanay100% (2)
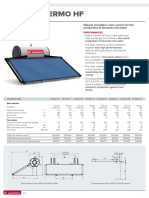
- Kairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionDocument4 pagesKairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionFILID MADNo ratings yet
- Y-Geo New Combined Finite-Discrete Element Numerical Code For Geomechanical ApplicationsDocument14 pagesY-Geo New Combined Finite-Discrete Element Numerical Code For Geomechanical ApplicationsRicardo Huisa BustiosNo ratings yet
- FAGOR Innovation 8kgDocument22 pagesFAGOR Innovation 8kgmenloparckNo ratings yet