You might also like
- LTE Uplink Scheduling Algorithms Performance andDocument6 pagesLTE Uplink Scheduling Algorithms Performance andJayeta BiswasNo ratings yet
- 1941 LabDocument44 pages1941 LabJayeta BiswasNo ratings yet
- A Multi-User MIMO Resource Scheduling SchemeDocument5 pagesA Multi-User MIMO Resource Scheduling SchemeJayeta BiswasNo ratings yet
- Cross Layer QoSsupportframeworkandholisticopportunisticschedulingDocument9 pagesCross Layer QoSsupportframeworkandholisticopportunisticschedulingJayeta BiswasNo ratings yet
- Dynamic Packet Scheduling Performance in UTRADocument6 pagesDynamic Packet Scheduling Performance in UTRAJayeta BiswasNo ratings yet
- Optimal Resource Allocation in Wireless Ad Hoc NetworksDocument42 pagesOptimal Resource Allocation in Wireless Ad Hoc NetworksJayeta BiswasNo ratings yet
- Impact of Interference On Multi-Hop Wireless Network PerformanceDocument14 pagesImpact of Interference On Multi-Hop Wireless Network PerformanceJayeta BiswasNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Depression Analysis From Social Media Data in Bangla Language Applying Deep Recurrent Neural NetworkDocument32 pagesDepression Analysis From Social Media Data in Bangla Language Applying Deep Recurrent Neural NetworkSumit Kumar DamNo ratings yet
- Problem DrillDocument3 pagesProblem DrillEina Scarlet0% (2)
- SK LearnDocument9 pagesSK LearndomeNo ratings yet
- Sensors PDFDocument29 pagesSensors PDFmohan kNo ratings yet
- Thesis CMa FinalDocument62 pagesThesis CMa FinalRadmila KolevaNo ratings yet
- Basic Control SystemDocument176 pagesBasic Control SystemArief HidayatNo ratings yet
- Lecture#05algorithm (Lecture)Document26 pagesLecture#05algorithm (Lecture)muhabdull30No ratings yet
- The Natural ApproachDocument41 pagesThe Natural ApproachShaziaNo ratings yet
- DJ Dunn PID ControlDocument11 pagesDJ Dunn PID ControlRedouane FlissiNo ratings yet
- Seiner Dataversity Rwdg2014 08 Navigatingtheoceanofdatagovernancetools 20140821 140825200117 Phpapp02Document50 pagesSeiner Dataversity Rwdg2014 08 Navigatingtheoceanofdatagovernancetools 20140821 140825200117 Phpapp02Andreas PatriaNo ratings yet
- Business Process AutomationDocument3 pagesBusiness Process Automationava939No ratings yet
- Damianou, Lawrence - 2013 - Deep Gaussian ProcessesDocument9 pagesDamianou, Lawrence - 2013 - Deep Gaussian ProcessesBlack FoxNo ratings yet
- AI CheatDocument13 pagesAI CheataaaNo ratings yet
- Lecture 5 AI ExerciseDocument24 pagesLecture 5 AI ExerciseAwais AliNo ratings yet
- ECPE speaking scoring rubricDocument2 pagesECPE speaking scoring rubricguiNo ratings yet
- A Backstepping Based Dynamic Surface Control Method For A Class of Non-Lower Triangular Nonlinear SystemsDocument5 pagesA Backstepping Based Dynamic Surface Control Method For A Class of Non-Lower Triangular Nonlinear SystemsmaryamNo ratings yet
- Anfis StructureDocument5 pagesAnfis Structuresecret 31No ratings yet
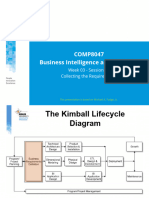
- COMP8047 - S03 Business RequirementsDocument30 pagesCOMP8047 - S03 Business RequirementsAlisha AprianyNo ratings yet
- Application Research of MRAC in Fault-Tolerant Flight ControllerDocument1 pageApplication Research of MRAC in Fault-Tolerant Flight ControlleradcadNo ratings yet
- A Machine Learning Methodology For Detecting Chronic Kidney DiseaseDocument14 pagesA Machine Learning Methodology For Detecting Chronic Kidney Disease18IT030 Manoj GNo ratings yet
- Introduction-To-Ml-Part-3 EditedDocument73 pagesIntroduction-To-Ml-Part-3 EditedHana AlhomraniNo ratings yet
- Decision TreeDocument18 pagesDecision TreeRithvik DadapuramNo ratings yet
- The Study of LanguageDocument3 pagesThe Study of LanguageBel SterlingNo ratings yet
- Synopsis FinalFINALDocument4 pagesSynopsis FinalFINALHanu MNo ratings yet
- LAB Manual Part A: Experiment No.8Document5 pagesLAB Manual Part A: Experiment No.8BiatchNo ratings yet
- Fundamentals of Artificial Neural NetworksDocument213 pagesFundamentals of Artificial Neural NetworksJosi MoNo ratings yet
- AssignmentDocument2 pagesAssignmentsalmanNo ratings yet
- Question Bank Class 9 (Ch. 1 - AI)Document5 pagesQuestion Bank Class 9 (Ch. 1 - AI)Bhavya JangidNo ratings yet
- Introduction To Machine Learning - Unit 3 - Week 1Document3 pagesIntroduction To Machine Learning - Unit 3 - Week 1DhivyaNo ratings yet
- Artificial Intelligence: LearningDocument12 pagesArtificial Intelligence: LearningSuraj GaikwadNo ratings yet