You might also like
- Weather Prediction Using Machine Learning TechniquessDocument53 pagesWeather Prediction Using Machine Learning Techniquessbakiz89No ratings yet
- Crop Science SyllabusDocument42 pagesCrop Science Syllabusbetty makushaNo ratings yet
- Ultrasonic Signal De-Noising Using Dual Filtering AlgorithmDocument8 pagesUltrasonic Signal De-Noising Using Dual Filtering Algorithmvhito619No ratings yet
- Application of Wavelet Transform For Fault Diagnosis in Rotating MachineryDocument6 pagesApplication of Wavelet Transform For Fault Diagnosis in Rotating MachinerySaeed JavdaniNo ratings yet
- Chair Optimal DistributedDetection IEEE AES Jan86Document4 pagesChair Optimal DistributedDetection IEEE AES Jan86Yifeng ZhouNo ratings yet
- Comparative Analysis of Advanced Thresholding Methods For Speech-Signal DenoisingDocument5 pagesComparative Analysis of Advanced Thresholding Methods For Speech-Signal DenoisingPurushotham Prasad KNo ratings yet
- Fault Isolation Based On Wavelet TransformDocument8 pagesFault Isolation Based On Wavelet TransformArmando MaloneNo ratings yet
- Vances: James P. StephensDocument8 pagesVances: James P. StephensPavan KulkarniNo ratings yet
- Statistical Model of Measurement Noise in Real-World PMU-based AcquisitionsDocument8 pagesStatistical Model of Measurement Noise in Real-World PMU-based AcquisitionstiagoNo ratings yet
- Paper Velocimeter SPIE RS07Document12 pagesPaper Velocimeter SPIE RS07Mounika ReddyNo ratings yet
- New Optimized Analysis Method For Measuring Extended Grounding SystemsDocument4 pagesNew Optimized Analysis Method For Measuring Extended Grounding SystemsKiriakos SiderakisNo ratings yet
- Comparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersDocument5 pagesComparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersInternational Organization of Scientific Research (IOSR)No ratings yet
- Jai Guided WaveDocument8 pagesJai Guided Waveimryuk19No ratings yet
- Acoustics Based Condition MonitoringDocument7 pagesAcoustics Based Condition MonitoringDeniz YazgaçNo ratings yet
- Vibro-Acoustic Techniques To Diagnose Power TransformersDocument9 pagesVibro-Acoustic Techniques To Diagnose Power TransformersAntonio Marcos SilvaNo ratings yet
- Denoising Signal To Diagnose Faults in Wind TurbinesDocument15 pagesDenoising Signal To Diagnose Faults in Wind TurbinesAlwinNo ratings yet
- Vibration Signal Analysis For Monitoring Launch Vehicle HealthDocument2 pagesVibration Signal Analysis For Monitoring Launch Vehicle HealthAnju BalaNo ratings yet
- Bruel Kjaer TechnicalReview1996-2aDocument33 pagesBruel Kjaer TechnicalReview1996-2aRenzo ArangoNo ratings yet
- Voice Activity Detection Based On Auto-Correlation Function Using Wavelet Transform and Teager Energy OperatorDocument23 pagesVoice Activity Detection Based On Auto-Correlation Function Using Wavelet Transform and Teager Energy OperatorHarshal PatilNo ratings yet
- CNSNS - 85 - (2020) - 105258Document21 pagesCNSNS - 85 - (2020) - 105258Miguel AF SanjuánNo ratings yet
- Audio Analysis Using The Discrete Wavelet Transform: 1 2 Related WorkDocument6 pagesAudio Analysis Using The Discrete Wavelet Transform: 1 2 Related WorkAlexandro NababanNo ratings yet
- Research Article: Multiframe Ultrasonic TOFD Weld Inspection Imaging Based On Wavelet Transform and Image RegistrationDocument9 pagesResearch Article: Multiframe Ultrasonic TOFD Weld Inspection Imaging Based On Wavelet Transform and Image Registrationphan hoang diepNo ratings yet
- Mechanical Systems and Signal Processing: P. Frank PaiDocument18 pagesMechanical Systems and Signal Processing: P. Frank PaiprawinpsgNo ratings yet
- 05235775Document7 pages05235775Pramod BhattNo ratings yet
- A New Diagnosis Algorithm For SensorsDocument6 pagesA New Diagnosis Algorithm For SensorsToaster97No ratings yet
- IEEE Digital Time-Of-Flight Measurement For Ultrasonic-SensorsDocument6 pagesIEEE Digital Time-Of-Flight Measurement For Ultrasonic-SensorsA N ArunkumarNo ratings yet
- A Study of Algorithm and Application in Transient Signals Wavelet Post-Analysis MethodsDocument6 pagesA Study of Algorithm and Application in Transient Signals Wavelet Post-Analysis MethodsJean Carlos PinedaNo ratings yet
- Estimation of Formant Frequency of Speech Signal by Linear Prediction Method and Wavelet Transform IJERTV2IS3371Document6 pagesEstimation of Formant Frequency of Speech Signal by Linear Prediction Method and Wavelet Transform IJERTV2IS3371AmanNo ratings yet
- Wavlets in Control EngineeringDocument27 pagesWavlets in Control EngineeringSunil KumarNo ratings yet
- HIGH PRECISION FM DSPDocument20 pagesHIGH PRECISION FM DSPTamanatao Hadji AliNo ratings yet
- 21 Utilising The Wavelet Transform in Condition-Based Maintenance A Review With ApplicationsDocument41 pages21 Utilising The Wavelet Transform in Condition-Based Maintenance A Review With ApplicationsIván VillamizarNo ratings yet
- Comparative Analysis Between DWT and WPD Techniques of Speech CompressionDocument9 pagesComparative Analysis Between DWT and WPD Techniques of Speech CompressionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocument7 pagesDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNo ratings yet
- Processing of Partial Discharge Ultra-High Frequency Signals From A True Size TransformerDocument4 pagesProcessing of Partial Discharge Ultra-High Frequency Signals From A True Size TransformerDebojyoti MukherjeeNo ratings yet
- Spectral Analysis For Neural SignalsDocument11 pagesSpectral Analysis For Neural SignalsXu Zhiming100% (1)
- Wavelet Based DVR FOR POWER QUALITY IMPROVEMENTDocument7 pagesWavelet Based DVR FOR POWER QUALITY IMPROVEMENTpardhu_y4No ratings yet
- Sensors: Noise Smoothing For Structural Vibration Test Signals Using An Improved Wavelet Thresholding TechniqueDocument16 pagesSensors: Noise Smoothing For Structural Vibration Test Signals Using An Improved Wavelet Thresholding TechniqueJyo ReddyNo ratings yet
- Sensors 20 03105 v2Document25 pagesSensors 20 03105 v2MarthandeNo ratings yet
- Disturbios QEEDocument6 pagesDisturbios QEEJulio FerreiraNo ratings yet
- SpectrogramDocument17 pagesSpectrogramShanmugaraj VskNo ratings yet
- Speech Enhancement Through Elimination of Impulsive Disturbance Using Log MMSE FilteringDocument4 pagesSpeech Enhancement Through Elimination of Impulsive Disturbance Using Log MMSE FilteringAbukari YakubuNo ratings yet
- BiomedicalDocument3 pagesBiomedicalNavyaNo ratings yet
- Wavelets: A New Tool For Signal AnalysisDocument12 pagesWavelets: A New Tool For Signal Analysisforscribd1981No ratings yet
- Energies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisDocument19 pagesEnergies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisEmir JusićNo ratings yet
- Baldon, Antonio B. (Bsme-3b) FinalDocument12 pagesBaldon, Antonio B. (Bsme-3b) FinalAlexsander JacobNo ratings yet
- WaveletAnalysis Denoisingsignal v4-5534-5538 PDFDocument6 pagesWaveletAnalysis Denoisingsignal v4-5534-5538 PDFHusam Al-AmeenNo ratings yet
- Multifunction Power Quality Monitoring System: V. Matz, T. Radil and P. RamosDocument8 pagesMultifunction Power Quality Monitoring System: V. Matz, T. Radil and P. RamosEng Asem RuqtiNo ratings yet
- Spectrum Analyzer: University of Tripoli Faculty of Engineering Electrical and Electronic Engineering DepartmentDocument15 pagesSpectrum Analyzer: University of Tripoli Faculty of Engineering Electrical and Electronic Engineering DepartmentMohmed Al NajarNo ratings yet
- Un Nuevo Procedimiento para La Medición de Método Directo Del Índice de Transmisión de Voz de Matriz CompletaDocument9 pagesUn Nuevo Procedimiento para La Medición de Método Directo Del Índice de Transmisión de Voz de Matriz CompletaDennis Queca CadizNo ratings yet
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDocument11 pagesBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliNo ratings yet
- Influence of The Transducer Bandwidth On Compressed Ultrasonic EchoesDocument13 pagesInfluence of The Transducer Bandwidth On Compressed Ultrasonic EchoesShabbir KhanNo ratings yet
- Accepted ManuscriptDocument18 pagesAccepted ManuscriptDorothy ManriqueNo ratings yet
- ST2101Document34 pagesST2101sandeep_hotNo ratings yet
- Wavelets: 1. What Is Wavelet CompressionDocument9 pagesWavelets: 1. What Is Wavelet CompressionDeepna KhattriNo ratings yet
- Sensors: A Vibration-Based Strategy For Health Monitoring of Offshore Pipelines' Girth-WeldsDocument18 pagesSensors: A Vibration-Based Strategy For Health Monitoring of Offshore Pipelines' Girth-WeldskhabiranNo ratings yet
- Department of Mechanical Engineering National Institute of TechnologyDocument7 pagesDepartment of Mechanical Engineering National Institute of TechnologyKumarChirraNo ratings yet
- Wavelet Transform and Signal Denoising Using Wavelet Method: Çiğdem Polat Dautov Mehmet Siraç ÖZERDEMDocument4 pagesWavelet Transform and Signal Denoising Using Wavelet Method: Çiğdem Polat Dautov Mehmet Siraç ÖZERDEMDeenanath kumarNo ratings yet
- Lit Review Model 2Document12 pagesLit Review Model 2Vishal AryaNo ratings yet
- Application of The Integrated AE and HFCT Sensors For Online Dry-Type Transformer Partial Discharge Monitoring. Case StudyDocument7 pagesApplication of The Integrated AE and HFCT Sensors For Online Dry-Type Transformer Partial Discharge Monitoring. Case Studyduong nguyenNo ratings yet
- 1 s2.0 S1875389215010330 MainDocument4 pages1 s2.0 S1875389215010330 MainAbdelkader RabahNo ratings yet
- Time-Frequency Domain for Segmentation and Classification of Non-stationary Signals: The Stockwell Transform Applied on Bio-signals and Electric SignalsFrom EverandTime-Frequency Domain for Segmentation and Classification of Non-stationary Signals: The Stockwell Transform Applied on Bio-signals and Electric SignalsNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- How To Make A Jam Sandwich PDFDocument1 pageHow To Make A Jam Sandwich PDFAhmed SamirNo ratings yet
- A Summer's Reading: Bagrut Questions and AnswersDocument12 pagesA Summer's Reading: Bagrut Questions and AnswersShaza HadiNo ratings yet
- Terms and Definitions: E C I SDocument18 pagesTerms and Definitions: E C I SShaza HadiNo ratings yet
- Spelling List 15 G4Document2 pagesSpelling List 15 G4Shaza HadiNo ratings yet
- Probability of Random VectorsDocument7 pagesProbability of Random VectorslfebrescNo ratings yet
- Iso 27018 Eu Working Paper Vol1 n2Document26 pagesIso 27018 Eu Working Paper Vol1 n2Shaza HadiNo ratings yet
- COGNITIVEDocument20 pagesCOGNITIVEGaurav JainNo ratings yet
- Comm ch10 Coding en PDFDocument67 pagesComm ch10 Coding en PDFShaza HadiNo ratings yet
- EEG SignalDocument7 pagesEEG SignalShaza HadiNo ratings yet
- 4 Motor Cortex NotesDocument4 pages4 Motor Cortex NotesShaza HadiNo ratings yet
- EEG SignalDocument7 pagesEEG SignalShaza HadiNo ratings yet
- BostanovDocument10 pagesBostanovShaza HadiNo ratings yet
- Dadm Assesment #2: Akshat BansalDocument24 pagesDadm Assesment #2: Akshat BansalAkshatNo ratings yet
- EN 213 Vertintojui WWWDocument2 pagesEN 213 Vertintojui WWWMonika PetronytėNo ratings yet
- Mineral Resource Classification - It's Time To Shoot The Spotted Dog'!Document6 pagesMineral Resource Classification - It's Time To Shoot The Spotted Dog'!Hassan Dotsh100% (1)
- Directorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries BhadrakDocument1 pageDirectorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries Bhadrakbiswajit mathematicsNo ratings yet
- Hydrotest Test FormatDocument27 pagesHydrotest Test FormatRähûl Prätäp SïnghNo ratings yet
- GRADE 302: Element Content (%)Document3 pagesGRADE 302: Element Content (%)Shashank Saxena100% (1)
- IBM Thinkpad Z61 Quanta BW2Document80 pagesIBM Thinkpad Z61 Quanta BW2Abubakar SidikNo ratings yet
- Course 3 Mathematics Common Core Workbook AnswersDocument4 pagesCourse 3 Mathematics Common Core Workbook Answerspqdgddifg100% (1)
- Couvade SyndromeDocument5 pagesCouvade SyndromejudssalangsangNo ratings yet
- Time-Temperature Charge Function of A High Dynamic Thermal Heat Storage With Phase Change MaterialDocument15 pagesTime-Temperature Charge Function of A High Dynamic Thermal Heat Storage With Phase Change Materialgassoumi walidNo ratings yet
- Practice Paper Pre Board Xii Biology 2023-24-1Document6 pagesPractice Paper Pre Board Xii Biology 2023-24-1salamnaseema14No ratings yet
- Contemporary Architecture Is The Architecture of The 21st Century. No Single Style Is DominantDocument2 pagesContemporary Architecture Is The Architecture of The 21st Century. No Single Style Is DominantShubham DuaNo ratings yet
- ShotcreteDocument7 pagesShotcreteafuhcivNo ratings yet
- Major Chnage at Tata TeaDocument36 pagesMajor Chnage at Tata Teasheetaltandon100% (1)
- Case StarbucksDocument3 pagesCase StarbucksAbilu Bin AkbarNo ratings yet
- 3.1.1 - Nirmaan Annual Report 2018 19Document66 pages3.1.1 - Nirmaan Annual Report 2018 19Nikhil GampaNo ratings yet
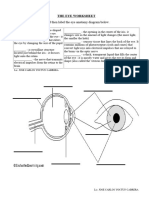
- The Eye WorksheetDocument3 pagesThe Eye WorksheetCally ChewNo ratings yet
- The Elder Scrolls V Skyrim - New Lands Mod TutorialDocument1,175 pagesThe Elder Scrolls V Skyrim - New Lands Mod TutorialJonx0rNo ratings yet
- Instruction Manual Il-Obct-R1: Slip-Over Current Transformer ObctDocument2 pagesInstruction Manual Il-Obct-R1: Slip-Over Current Transformer Obctبوحميدة كمالNo ratings yet
- Exchange 2010 UnderstandDocument493 pagesExchange 2010 UnderstandSeKoFieNo ratings yet
- Annual Report 2022 2Document48 pagesAnnual Report 2022 2Dejan ReljinNo ratings yet
- GDCR - Second RevisedDocument290 pagesGDCR - Second RevisedbhaveshbhoiNo ratings yet
- Development and Growth of Teeth: Dr. Madhusudhan ReddyDocument48 pagesDevelopment and Growth of Teeth: Dr. Madhusudhan ReddysiyaNo ratings yet
- A Database For Handwritten Text Recognition ResearchDocument5 pagesA Database For Handwritten Text Recognition Researchtweety492No ratings yet
- Chapter 17 Study Guide: VideoDocument7 pagesChapter 17 Study Guide: VideoMruffy DaysNo ratings yet
- CHAPTER THREE-Teacher's PetDocument3 pagesCHAPTER THREE-Teacher's PetTaylor ComansNo ratings yet
- Ton Miles Calculation 1Document17 pagesTon Miles Calculation 1Alexander Armando Clemente Andrade100% (1)
- JurnalDocument12 pagesJurnalSandy Ronny PurbaNo ratings yet