You might also like
- MlaaDocument8 pagesMlaacacolukiaNo ratings yet
- Survey On Image Denoising Methods: L. Sherlin Pravina S. ShunmuganDocument5 pagesSurvey On Image Denoising Methods: L. Sherlin Pravina S. ShunmuganGolam Moktader DaiyanNo ratings yet
- Paper 3Document11 pagesPaper 3irjmssNo ratings yet
- tmp54EA TMPDocument6 pagestmp54EA TMPFrontiersNo ratings yet
- MRI Image Preprocessing and Noise Removal Technique Using Linear and Nonlinear FiltersDocument4 pagesMRI Image Preprocessing and Noise Removal Technique Using Linear and Nonlinear FiltersManoj MaggotNo ratings yet
- Real-Time Acoustics Simulation Using Mesh-Tracing: January 2003Document5 pagesReal-Time Acoustics Simulation Using Mesh-Tracing: January 2003Bert SchiettecatteNo ratings yet
- Image de NoisingDocument12 pagesImage de NoisingwaqaspieasNo ratings yet
- A Comparative Analysis On Image Denoising Using Different Median Filter MethodsDocument9 pagesA Comparative Analysis On Image Denoising Using Different Median Filter MethodsIJRASETPublicationsNo ratings yet
- Shadow Detection Removal Colour ImagesDocument5 pagesShadow Detection Removal Colour ImagesdestawNo ratings yet
- Antialiasing With Stratified B-Spline Filters of Arbitrary DegreeDocument12 pagesAntialiasing With Stratified B-Spline Filters of Arbitrary Degreemarco nordiNo ratings yet
- Novel Wavelet Thresholding for Image DenoisingDocument4 pagesNovel Wavelet Thresholding for Image DenoisingjebileeNo ratings yet
- Liu 2017Document15 pagesLiu 2017AzizNo ratings yet
- Denoising Techniques For Synthetic Aperture Radar Data - A ReviewDocument11 pagesDenoising Techniques For Synthetic Aperture Radar Data - A ReviewIAEME PublicationNo ratings yet
- Ray TracingDocument10 pagesRay Tracingnaji1365No ratings yet
- A Review On Image Denoising TechniquesDocument6 pagesA Review On Image Denoising TechniquesIJRASETPublicationsNo ratings yet
- Design of Hybrid Filter For Denoising Images Using Fuzzy Network and Edge DetectingDocument10 pagesDesign of Hybrid Filter For Denoising Images Using Fuzzy Network and Edge DetectingvinodspecNo ratings yet
- A Survey On Impulse Noise Removal Techniques in Image ProcessingDocument5 pagesA Survey On Impulse Noise Removal Techniques in Image ProcessingsghsdhsdfNo ratings yet
- Image Enhancement Using Crossbreed Wavelet Neighbour MethodDocument4 pagesImage Enhancement Using Crossbreed Wavelet Neighbour MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Image Denoising For Different Noise Models by Various Filters: A Brief SurveyDocument4 pagesImage Denoising For Different Noise Models by Various Filters: A Brief SurveyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Image Denoising With Contourlet TransformDocument6 pagesImage Denoising With Contourlet TransformIJRASETPublicationsNo ratings yet
- Computational Restoration of Fluorescence Images - Noise Reduction, Deconvolution and Pattern RecognitionDocument12 pagesComputational Restoration of Fluorescence Images - Noise Reduction, Deconvolution and Pattern RecognitionAbhishek SahasrabudheNo ratings yet
- Performance Assesment of Spatial Filters in Noise Removal Based On A Degradation ModelDocument4 pagesPerformance Assesment of Spatial Filters in Noise Removal Based On A Degradation Modelanon_977232852No ratings yet
- A New Approach To Remove Gaussian Noise in Digital Images by Immerkaer Fast MethodDocument5 pagesA New Approach To Remove Gaussian Noise in Digital Images by Immerkaer Fast MethodGeerthikDotSNo ratings yet
- Neuro-Fuzzy Synergism To The Intelligent System For Edge Detection and EnhancementDocument15 pagesNeuro-Fuzzy Synergism To The Intelligent System For Edge Detection and EnhancementsakthivelduraiNo ratings yet
- Auto CutsDocument11 pagesAuto CutsRoi PoranneNo ratings yet
- Non-Linear Filter For Digital Image De-Noising: AbstractDocument7 pagesNon-Linear Filter For Digital Image De-Noising: Abstractshruthig29111988No ratings yet
- Survey of Image Denoising TechniquesDocument7 pagesSurvey of Image Denoising TechniquesKhalandar BashaNo ratings yet
- Ijct V2i1p4Document4 pagesIjct V2i1p4IjctJournalsNo ratings yet
- A Comparative Study of Various Image Filtering Techniques For Removing Various Noisy Pixels in Aerial ImageDocument13 pagesA Comparative Study of Various Image Filtering Techniques For Removing Various Noisy Pixels in Aerial ImageMizanur RahamanNo ratings yet
- A Mar IIIDocument12 pagesA Mar IIIjitendra09047No ratings yet
- Sonar Image Processing For Underwater Object Detection Based On High Resolution System PDFDocument6 pagesSonar Image Processing For Underwater Object Detection Based On High Resolution System PDFSrikanth VasamsettiNo ratings yet
- Image Denoising Model Based On Wiener Filter and A Novel WaveletDocument11 pagesImage Denoising Model Based On Wiener Filter and A Novel WaveletInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Detection of Cracks in Pavement Using Edge Detection OperatorDocument7 pagesAutomatic Detection of Cracks in Pavement Using Edge Detection OperatorIndonesianRivieraNo ratings yet
- Scratch Detection & Restoration in Scratch Detection & Restoration in Old Videos & Still ImagesDocument39 pagesScratch Detection & Restoration in Scratch Detection & Restoration in Old Videos & Still ImagesThrni VijiNo ratings yet
- DownloadDocument7 pagesDownloadwafa wafaNo ratings yet
- Adaptive Image Denoising Using Cuckoo Algorithm: Memoona Malik Faraz Ahsan Sajjad MohsinDocument14 pagesAdaptive Image Denoising Using Cuckoo Algorithm: Memoona Malik Faraz Ahsan Sajjad MohsincarloslycanXNo ratings yet
- Ultrasound-Image De-Noising Technique's Best Mix Selection Using Genetic Algorithm ApproachDocument5 pagesUltrasound-Image De-Noising Technique's Best Mix Selection Using Genetic Algorithm ApproachInternational Journal of Engineering and TechniquesNo ratings yet
- Rakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Document6 pagesRakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Deepak SankhalaNo ratings yet
- An Adaptive Stripe Noise Removal Algorithm for Optical Satellite ImageryDocument7 pagesAn Adaptive Stripe Noise Removal Algorithm for Optical Satellite Imageryaya__ayakNo ratings yet
- Simulation of Gaussian Pulses Propagation Through Single Mode Optical Fiber Using MATLABDocument7 pagesSimulation of Gaussian Pulses Propagation Through Single Mode Optical Fiber Using MATLABKien Bui XuanNo ratings yet
- Expert Systems with Applications journal evaluates automatic weld defect inspectionDocument13 pagesExpert Systems with Applications journal evaluates automatic weld defect inspectionaliNo ratings yet
- In PaintingDocument6 pagesIn PaintingnugrohoNo ratings yet
- Min-Max Average Pooling Based Filter For Impulse Noise RemovalDocument5 pagesMin-Max Average Pooling Based Filter For Impulse Noise RemovalAnton StefanNo ratings yet
- Art 1211369478Document5 pagesArt 1211369478sabdelmalek785No ratings yet
- Rajabi Specle Noise PDFDocument6 pagesRajabi Specle Noise PDFmalimarijoNo ratings yet
- Bayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadDocument3 pagesBayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadsakethmohanNo ratings yet
- Remote Sensing: Deep Learning For SAR Image DespecklingDocument20 pagesRemote Sensing: Deep Learning For SAR Image DespecklingCan AtalayNo ratings yet
- Automatic Reduction of Periodic Noise in Images Using Adaptive Gaussian Star FilterDocument13 pagesAutomatic Reduction of Periodic Noise in Images Using Adaptive Gaussian Star FilterMuhammad HanirNo ratings yet
- Detection of Moving Object Based On Background SubtractionDocument4 pagesDetection of Moving Object Based On Background SubtractionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Image ProcessingDocument6 pagesImage ProcessingJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- 3D Wavelet Sub-Bands Mixing For Image De-Noising and Segmentation of Brain ImagesDocument15 pages3D Wavelet Sub-Bands Mixing For Image De-Noising and Segmentation of Brain ImagesAJER JOURNALNo ratings yet
- An Approach To Detect Lofar Lines: Pattern Recognition Le ErsDocument10 pagesAn Approach To Detect Lofar Lines: Pattern Recognition Le ErsBùi Trường GiangNo ratings yet
- Analog Audio PDFDocument7 pagesAnalog Audio PDFIon Mikel Onandia MartinezNo ratings yet
- A New Perspective of Auxiliary-Function-Based Independent Component Analysis in Acoustic Echo CancellationDocument5 pagesA New Perspective of Auxiliary-Function-Based Independent Component Analysis in Acoustic Echo CancellationPiper OntuNo ratings yet
- The Aliasing Problem in Computer-Generated Shaded ImagesDocument7 pagesThe Aliasing Problem in Computer-Generated Shaded Imagesrodlima78No ratings yet
- Image Filtering Techniques For Medical Image Post-Processing: An OverviewDocument7 pagesImage Filtering Techniques For Medical Image Post-Processing: An Overviewdhavalp_21No ratings yet
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocument5 pagesDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretNo ratings yet
- CaiDocument20 pagesCaiFarou BrahimNo ratings yet
- Digital Communications: Courses and Exercises with SolutionsFrom EverandDigital Communications: Courses and Exercises with SolutionsRating: 3 out of 5 stars3/5 (2)
- DVP PLC Programming ExamplsDocument267 pagesDVP PLC Programming Examplssathiiishkumar67% (3)
- DatasheetDocument2 pagesDatasheetsathiiishkumarNo ratings yet
- Basic PLCDocument77 pagesBasic PLCrpshvju100% (1)
- Scad A 1Document76 pagesScad A 1ravindarsinghNo ratings yet
- Transistor NPN 2n222aDocument8 pagesTransistor NPN 2n222aRoberto Eduardo Tenorio RamosNo ratings yet
- Dtert - Draft Common Syllabus 2009Document146 pagesDtert - Draft Common Syllabus 2009agunanithi21No ratings yet
- Production Management Midterm ReviewDocument21 pagesProduction Management Midterm Reviewielsiu21184No ratings yet
- Large and Medium Manufacturing Industry Survey Report 2018Document778 pagesLarge and Medium Manufacturing Industry Survey Report 2018melakuNo ratings yet
- Cardiopulmonary System: Relevant Anatomy & Physiology: HeartDocument12 pagesCardiopulmonary System: Relevant Anatomy & Physiology: HeartJulia SalvioNo ratings yet
- EAGLE TUGS - Parts Service ManualDocument72 pagesEAGLE TUGS - Parts Service ManualDave MilnerNo ratings yet
- Warhammer 40k Kroot VehiclesDocument2 pagesWarhammer 40k Kroot VehiclesJoseph RobinsonNo ratings yet
- Porter's Diamond Model Explains Nations' Success in IT CompetitionDocument30 pagesPorter's Diamond Model Explains Nations' Success in IT CompetitionKuthubudeen T MNo ratings yet
- Hobby 01: COD. 9942062.01 REV. 00Document9 pagesHobby 01: COD. 9942062.01 REV. 00Alexander SharamiginNo ratings yet
- DUB01CB Eng PDFDocument4 pagesDUB01CB Eng PDFAnonymous hj273CMNo ratings yet
- 1296169395JH 122310 - WebDocument12 pages1296169395JH 122310 - WebCoolerAdsNo ratings yet
- 5.case Study: Effects of Homeopathic Medicines in AdultsDocument2 pages5.case Study: Effects of Homeopathic Medicines in AdultsAMEEN ARTSNo ratings yet
- Tramadol Drug StudyDocument1 pageTramadol Drug Studymilkv82% (11)
- Ringing On A Transmission LineDocument33 pagesRinging On A Transmission LinePrem BhaskaraNo ratings yet
- ASIAN LIVESTOCK PERSPECTIVESDocument18 pagesASIAN LIVESTOCK PERSPECTIVESMuadz AbdurrahmanNo ratings yet
- TICSA - Diesel Uno Petroleos Guatemala (13.01.23)Document1 pageTICSA - Diesel Uno Petroleos Guatemala (13.01.23)Luis M LópezNo ratings yet
- Engineering Mechanics Lectures PDFDocument83 pagesEngineering Mechanics Lectures PDFluay adnanNo ratings yet
- B.pharm Course Handbook 2017 18Document74 pagesB.pharm Course Handbook 2017 18Md RaquibNo ratings yet
- Answer Section B and C and Paper 3Document21 pagesAnswer Section B and C and Paper 3Adnan ShamsudinNo ratings yet
- Man FXM FKM Motors PDFDocument176 pagesMan FXM FKM Motors PDFRenato MeloNo ratings yet
- 3.1 The Truth About Air TravelDocument14 pages3.1 The Truth About Air TravelСвітлана Свирид0% (1)
- Horizontal Projectile WSDocument3 pagesHorizontal Projectile WSForsbergPhysicsNo ratings yet
- Operator Manual T2100-ST2 - ST1Document50 pagesOperator Manual T2100-ST2 - ST1Nurul FathiaNo ratings yet
- Geotechnical Elements and Models in OpenSeesDocument21 pagesGeotechnical Elements and Models in OpenSeesUmut AkınNo ratings yet
- Quant One Analyser – endless possibilitiesDocument6 pagesQuant One Analyser – endless possibilitiesSamuel SuNo ratings yet
- 322439480MVR Single Page Single Page Booklet - OPTDocument12 pages322439480MVR Single Page Single Page Booklet - OPTlarry vargas bautistaNo ratings yet
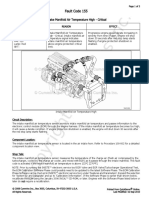
- Fault Code 155: Intake Manifold Air Temperature High - CriticalDocument3 pagesFault Code 155: Intake Manifold Air Temperature High - Criticalhamilton miranda100% (1)
- Ghost Events in Optical Time - NewDocument3 pagesGhost Events in Optical Time - NewsekutunetNo ratings yet
- Fe in Black TeaDocument6 pagesFe in Black TeaHerni Nur AeniNo ratings yet
- Difference Between AerospaceDocument2 pagesDifference Between AerospaceSyawalMaulanaNo ratings yet
- Carta Psicrometrica PDFDocument2 pagesCarta Psicrometrica PDFJuliethNo ratings yet
- Finite Element Simplified Fatigue AnalysisDocument4 pagesFinite Element Simplified Fatigue AnalysisJin Hwan KimNo ratings yet