You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
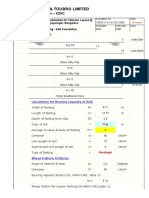
- SBC DesignDocument5 pagesSBC DesignNitesh SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Special RelativityDocument51 pagesSpecial RelativityBernard SCHAEFFER100% (1)
- Handbook of Spring Design Part 1Document51 pagesHandbook of Spring Design Part 1senthilkumar D0% (1)
- Uniform Circular MotionDocument11 pagesUniform Circular MotionAnne Margaret AlmedaNo ratings yet
- Mathcad - Bridge (8mx18m) Deck Slab DesignDocument16 pagesMathcad - Bridge (8mx18m) Deck Slab DesignSreyleap NhetNo ratings yet
- Proposals For New One-Way Shear Equations For The 318 Building CodeDocument4 pagesProposals For New One-Way Shear Equations For The 318 Building CodepicottNo ratings yet
- Orifice Meter ReportDocument19 pagesOrifice Meter ReportDilli Babu PNo ratings yet
- Fatigue of WeldmentsDocument222 pagesFatigue of WeldmentsAjay MenonNo ratings yet
- Fundamentals of ThermodynamicsDocument55 pagesFundamentals of Thermodynamicsudoye kachiNo ratings yet
- Sterling - JEE - Physics - (Elasticity Thermal Exp, Calorimetry & Heat Transfer) - EngDocument51 pagesSterling - JEE - Physics - (Elasticity Thermal Exp, Calorimetry & Heat Transfer) - EngRamJiPandeyNo ratings yet
- Theory of The Strong Force and The Nuclear EnergyDocument14 pagesTheory of The Strong Force and The Nuclear EnergyBernard SCHAEFFERNo ratings yet
- The Very Nature of The Strong Nuclear ForceDocument2 pagesThe Very Nature of The Strong Nuclear ForceBernard SCHAEFFERNo ratings yet
- Electromagnetic Theory of The Binding Energy of The Hydrogen IsotopesDocument12 pagesElectromagnetic Theory of The Binding Energy of The Hydrogen IsotopesBernard SCHAEFFERNo ratings yet
- Theory of The Nuclear Strong Force (Presentation)Document17 pagesTheory of The Nuclear Strong Force (Presentation)Bernard SCHAEFFERNo ratings yet
- Numerical Modelling of Fast Crack PropagationDocument17 pagesNumerical Modelling of Fast Crack PropagationBernard SCHAEFFERNo ratings yet
- General Relativity in A Mathematical NutshellDocument6 pagesGeneral Relativity in A Mathematical NutshellBernard SCHAEFFERNo ratings yet
- Plastic Deformation of Transparent CrystalsDocument4 pagesPlastic Deformation of Transparent CrystalsBernard SCHAEFFERNo ratings yet
- Table of Nuclear MomentsDocument3 pagesTable of Nuclear MomentsBernard SCHAEFFERNo ratings yet
- Table of IsotopesDocument59 pagesTable of IsotopesBernard SCHAEFFER100% (2)
- The Spins of The Photon and of The ElectronDocument3 pagesThe Spins of The Photon and of The ElectronBernard SCHAEFFER100% (1)
- Derivation of The Lorentz TransformationDocument3 pagesDerivation of The Lorentz TransformationBernard SCHAEFFERNo ratings yet
- Special Relativity in A Mathematical NutshellDocument6 pagesSpecial Relativity in A Mathematical NutshellBernard SCHAEFFERNo ratings yet
- Quantum Mechanics Consistent Periodic TablesDocument14 pagesQuantum Mechanics Consistent Periodic TablesBernard SCHAEFFER100% (2)
- Numerical Simulation of A Breaking WaveDocument17 pagesNumerical Simulation of A Breaking WaveBernard SCHAEFFERNo ratings yet
- Shape of A Tree BranchDocument8 pagesShape of A Tree BranchBernard SCHAEFFER100% (2)
- Numerical Modeling of Composite MaterialsDocument7 pagesNumerical Modeling of Composite MaterialsBernard SCHAEFFER100% (1)
- Periodic Table Quantum Mechanics ConsistentDocument5 pagesPeriodic Table Quantum Mechanics ConsistentBernard SCHAEFFER100% (4)
- Solid Propellants Fracture CriterionDocument8 pagesSolid Propellants Fracture CriterionBernard SCHAEFFERNo ratings yet
- Influence of Colour Centres On The Plastic Deformation of Halide CrystalsDocument12 pagesInfluence of Colour Centres On The Plastic Deformation of Halide CrystalsBernard SCHAEFFERNo ratings yet
- Deformation and The Strip Necking Zone in A Cracked Steel SheetDocument5 pagesDeformation and The Strip Necking Zone in A Cracked Steel SheetBernard SCHAEFFERNo ratings yet
- Concrete BeamDocument3 pagesConcrete BeamCarolineMwitaMoseregaNo ratings yet
- Recent Developments in Turbulence Management (1991)Document343 pagesRecent Developments in Turbulence Management (1991)Irfan MahmoodNo ratings yet
- ANSYS Autodyn Composite ModelingDocument70 pagesANSYS Autodyn Composite Modelinggustavo5150No ratings yet
- Chapter 9 - Rock SlopesDocument69 pagesChapter 9 - Rock SlopesLupyana wa LupyanaNo ratings yet
- Thesis On Steel Fibre Reinforced ConcreteDocument8 pagesThesis On Steel Fibre Reinforced Concretedenisemillerdesmoines100% (2)
- Fluid: Static DynamicDocument5 pagesFluid: Static DynamicAn MohdNo ratings yet
- Lab 1 CE 2015Document60 pagesLab 1 CE 2015Doaa BadarnehNo ratings yet
- Class MD 2 Lec 6 FlyWheelDocument32 pagesClass MD 2 Lec 6 FlyWheelTalha Bin MudassarNo ratings yet
- Chapter Two: Limit State DesignDocument11 pagesChapter Two: Limit State DesignYaredo MessiNo ratings yet
- Strain - SlidesDocument24 pagesStrain - SlidesVincent VuongNo ratings yet
- Second Law of ThermodynamicsDocument18 pagesSecond Law of ThermodynamicsKaryl Mitzi Anne DemetilloNo ratings yet
- Training Manual J F A M: Et Undamentals Ircraft AintenanceDocument115 pagesTraining Manual J F A M: Et Undamentals Ircraft AintenanceJojo Dio HohoNo ratings yet
- 04 - Analisa Pondasi DangkalDocument50 pages04 - Analisa Pondasi DangkalWak HoNo ratings yet
- A2 Ideal Gases QuestionsDocument60 pagesA2 Ideal Gases QuestionsmandoolalaNo ratings yet
- Sample Lab Report on Projectile MotionDocument27 pagesSample Lab Report on Projectile MotionJasmeetSinghNo ratings yet
- Jimma University: College of Natural Sciences Department of PhysicsDocument22 pagesJimma University: College of Natural Sciences Department of PhysicschalchisadeguNo ratings yet
- JM302 Material Technology Buoyancy Case StudyDocument5 pagesJM302 Material Technology Buoyancy Case StudyJeffery YipNo ratings yet
- Strength of Material Chapter 3Document22 pagesStrength of Material Chapter 3naserunnNo ratings yet
- Home Work 1: Lagrangian Mechanics: 1 A List of LagrangiansDocument21 pagesHome Work 1: Lagrangian Mechanics: 1 A List of LagrangiansAbhinav RoyNo ratings yet
- ABS Ship SFA Guide - e Dec07Document46 pagesABS Ship SFA Guide - e Dec07Advan ZuidplasNo ratings yet
- IEO Sample Paper For Class 4thDocument4 pagesIEO Sample Paper For Class 4thDavid Farmer33% (3)