You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- FAM3 1 McEachern 61000 4 30 StandardXDocument12 pagesFAM3 1 McEachern 61000 4 30 StandardXWillian XavierNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Learning PlatformDocument12 pagesLearning PlatformrocaoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- PID1Document9 pagesPID1rocaoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
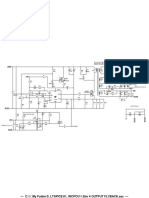
- C:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscDocument1 pageC:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscrocaoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Tap ChangerDocument14 pagesTap ChangerrocaoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- FR530Document7 pagesFR530rocaoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Magetic Design For InverterDocument2 pagesMagetic Design For InverterrocaoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesDocument7 pagesA 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesrocaoNo ratings yet
- 50 60hz Inductor DesignDocument5 pages50 60hz Inductor DesignrocaoNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- ObsCPMT PDFDocument14 pagesObsCPMT PDFrocaoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Loss Power of Abb Igbts - 5sya 2053-04Document6 pagesLoss Power of Abb Igbts - 5sya 2053-04rocaoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 15A Current Sense PDFDocument33 pages15A Current Sense PDFrocaoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- LatchesDocument7 pagesLatchesrocaoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- PPL PDFDocument18 pagesPPL PDFrocaoNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Trig IndentitiesDocument7 pagesTrig IndentitiesrocaoNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- DSP DS1104 Electric Drives - LabDocument2 pagesDSP DS1104 Electric Drives - LabrocaoNo ratings yet
- GPU - SinePower PDFDocument4 pagesGPU - SinePower PDFrocaoNo ratings yet
- 3 Phase Voltage FolumarsDocument12 pages3 Phase Voltage FolumarsrocaoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- DSP DS1104 Electric Drives - LabDocument2 pagesDSP DS1104 Electric Drives - LabrocaoNo ratings yet
- OBD II Specifications and Connections PDFDocument4 pagesOBD II Specifications and Connections PDFrocaoNo ratings yet
- Circle The Best Answer A, B, C, D or EDocument4 pagesCircle The Best Answer A, B, C, D or Ewilder jackNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Fundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistDocument346 pagesFundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistMayNo ratings yet
- Design and Development of Automatic Pneumatic Jack in Four Wheeler Ijariie5374Document5 pagesDesign and Development of Automatic Pneumatic Jack in Four Wheeler Ijariie5374Saravanan ViswakarmaNo ratings yet
- AssessmentDocument9 pagesAssessmentJuan Miguel Sapad AlpañoNo ratings yet
- 3-History Rock Cut MonumentDocument136 pages3-History Rock Cut MonumentkrishnaNo ratings yet
- Effects of Climate ChangeDocument3 pagesEffects of Climate Changejiofjij100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- LG250CDocument2 pagesLG250CCarlosNo ratings yet
- Shree New Price List 2016-17Document13 pagesShree New Price List 2016-17ontimeNo ratings yet
- GCSE AstronomyDocument30 pagesGCSE Astronomyharris123mc100% (1)
- Improve On-Time DeliveriesDocument24 pagesImprove On-Time DeliveriesUdayNo ratings yet
- Module-4 (PDFDrive)Document67 pagesModule-4 (PDFDrive)Divya priya KNo ratings yet
- Logic NotesDocument19 pagesLogic NotesCielo PulmaNo ratings yet
- 07ercoskun 05 01 PDFDocument23 pages07ercoskun 05 01 PDFjagmadridNo ratings yet
- Gypsum Plasterboard: National Standard of The People'S Republic of ChinaDocument15 pagesGypsum Plasterboard: National Standard of The People'S Republic of ChinaGarry100% (2)
- User'S Guide: Tm4C Series Tm4C129E Crypto Connected Launchpad Evaluation KitDocument36 pagesUser'S Guide: Tm4C Series Tm4C129E Crypto Connected Launchpad Evaluation KitLương Văn HưởngNo ratings yet
- Cathodic Protection Catalog - New 8Document1 pageCathodic Protection Catalog - New 8dhineshNo ratings yet
- Cynosure Starlux 500 Palomar Technical Service ManualDocument47 pagesCynosure Starlux 500 Palomar Technical Service ManualJF SilvaNo ratings yet
- Lab Report Marketing Mansi 4Document39 pagesLab Report Marketing Mansi 4Mansi SharmaNo ratings yet
- Significance of GodboleDocument5 pagesSignificance of GodbolehickeyvNo ratings yet
- RACI Matrix Design For Managing Stakeholders in PRDocument12 pagesRACI Matrix Design For Managing Stakeholders in PRRheza Nugraha Prabareswara100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Goldhofer FTV 850 BrochureDocument2 pagesGoldhofer FTV 850 BrochureMauroNo ratings yet
- Nivel VV-VW Board User Guide enDocument5 pagesNivel VV-VW Board User Guide enHarveyWishtartNo ratings yet
- Innerwear Industry Pitch PresentationDocument19 pagesInnerwear Industry Pitch PresentationRupeshKumarNo ratings yet
- Structural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsDocument118 pagesStructural Analysis and Design of Pressure Hulls - The State of The Art and Future TrendsRISHABH JAMBHULKARNo ratings yet
- Course Syllabus: Course Code Course Title ECTS CreditsDocument3 pagesCourse Syllabus: Course Code Course Title ECTS CreditsHanaa HamadallahNo ratings yet
- Napoleonic WargamingDocument13 pagesNapoleonic WargamingandyNo ratings yet
- Grade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaDocument25 pagesGrade - 2 Subject - Mathematics Unit - Geometry Topic - Geometrical Shapes School - Army School Roorkee Prepared by Mrs. RanjanaPenke Mejado BelenNo ratings yet
- Flow Chart - QCDocument2 pagesFlow Chart - QCKarthikeyan Shanmugavel100% (1)
- Fulltext 4 PDFDocument4 pagesFulltext 4 PDFSubhadip Banerjee0% (1)
- FemDocument4 pagesFemAditya SharmaNo ratings yet
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)