You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Spherical Blunted Tangential Ogive Nose-Cone For Hypersonic VehicleDocument4 pagesSpherical Blunted Tangential Ogive Nose-Cone For Hypersonic VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- EXERCISE 11.1: (Answer Key With Explanation)Document24 pagesEXERCISE 11.1: (Answer Key With Explanation)John MarksNo ratings yet
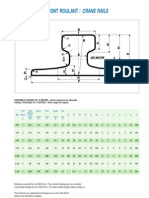
- Crane RailsDocument2 pagesCrane Rails_at_to_100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- CP 1 Experiment 2Document3 pagesCP 1 Experiment 2Mavy KylineNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- P15.3 Teacher Literacy Sheet: Magnetism and ElectromagnetismDocument2 pagesP15.3 Teacher Literacy Sheet: Magnetism and ElectromagnetismBenjamin WatsonNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Engg Mechanics Paper Dec 2019 As Per CODocument4 pagesEngg Mechanics Paper Dec 2019 As Per COPiyush BhandariNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Cold Formed Steel DesignDocument2 pagesCold Formed Steel DesignkiplingkipNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Exercise - 1 To 3 PC Circular Motion ResoDocument15 pagesExercise - 1 To 3 PC Circular Motion ResoZenith xNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Design All (Hmax 115')Document76 pagesDesign All (Hmax 115')nayeem_rayhanNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Physicschapter 6Document14 pagesPhysicschapter 6Owais FarooqNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Thermal Physics: Raymond A. Serway Chris VuilleDocument44 pagesThermal Physics: Raymond A. Serway Chris VuilleMark Lorens StaanaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Stress Caused by Combined LoadingsDocument19 pagesStress Caused by Combined LoadingsRaja RosenaniNo ratings yet
- Week 3 Lectures - Differential AnalysisDocument19 pagesWeek 3 Lectures - Differential AnalysisboogolamNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- ANSYS Mechanical APDL Theory Reference PDFDocument908 pagesANSYS Mechanical APDL Theory Reference PDFNam Vo100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- XSteam Excel v2.6Document9 pagesXSteam Excel v2.6Yos Cornel TariganNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Assignment No 2Document3 pagesAssignment No 2St ArNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Chapter 2 Exercises Part2Document2 pagesChapter 2 Exercises Part2Cedric MunlawinNo ratings yet
- Beam Deflection ManualDocument10 pagesBeam Deflection ManualwahtoiNo ratings yet
- Waves - CombineDocument60 pagesWaves - CombineHilman RazakNo ratings yet
- Nozzle Load Calculation - U-FA 201Document32 pagesNozzle Load Calculation - U-FA 201manish318No ratings yet
- First Course Handout Physics 2Document3 pagesFirst Course Handout Physics 2Kuljeet YadavNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Numerical Optimization of Flow-Heat Ducts With Helical Micro-Fins, Using Entropy Generation Minimization (EGM) MethodDocument8 pagesNumerical Optimization of Flow-Heat Ducts With Helical Micro-Fins, Using Entropy Generation Minimization (EGM) MethodPablo Vicente Vargas CortésNo ratings yet
- Measurement of Structural Damping and Equivalent Mass of A Vibrating BeamDocument5 pagesMeasurement of Structural Damping and Equivalent Mass of A Vibrating BeamTRUNG QUOC LENo ratings yet
- Thermodynamics NotesDocument41 pagesThermodynamics NotesAbel NetoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Unit 2 - Week 1: Assignment 1Document6 pagesUnit 2 - Week 1: Assignment 1Vishal GaikwadNo ratings yet
- (Eshkevari Et Al. - 2018) Bearing Capacity o Strip Footings On Sand Over ClayDocument11 pages(Eshkevari Et Al. - 2018) Bearing Capacity o Strip Footings On Sand Over ClayMoritz SchleehNo ratings yet
- Prelab: Questions To Answer Before Doing The LabDocument4 pagesPrelab: Questions To Answer Before Doing The Labsuzette TabladaNo ratings yet
- Using The Low Cycle Fatigue Approach When KT Nominal Stress Exceeds The Yield Strength: A Fundamental Mistake!Document2 pagesUsing The Low Cycle Fatigue Approach When KT Nominal Stress Exceeds The Yield Strength: A Fundamental Mistake!VigneshwaraNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Damage Tolerance and Fatigue Behaviour of CompositesDocument32 pagesDamage Tolerance and Fatigue Behaviour of Compositesachyutha_krishnaNo ratings yet
- Lecture 22 Thermal Engineering II (18.08.2020)Document36 pagesLecture 22 Thermal Engineering II (18.08.2020)Dr. BIBIN CHIDAMBARANATHANNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)