You might also like
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Chapter Four Result and DiscussionDocument6 pagesChapter Four Result and DiscussionOkpanachi JuliusNo ratings yet
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericFrom EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo ratings yet
- A Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsDocument10 pagesA Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsBhaskar Dutta KarmakarNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- Research of Weak GPS Signal Acquisition Algorithm: Shijun Tian Yiming PiDocument4 pagesResearch of Weak GPS Signal Acquisition Algorithm: Shijun Tian Yiming Pitahir.saleemNo ratings yet
- 2007jan - GPS Receiver CalibrationDocument8 pages2007jan - GPS Receiver Calibrationnileshdesai857No ratings yet
- Detection and Location of Gps Interference Sources Using Digital Receiver ElectronicsDocument6 pagesDetection and Location of Gps Interference Sources Using Digital Receiver ElectronicsArjun AslekarNo ratings yet
- Paper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFDocument6 pagesPaper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFRakhmadhanyPrimanandaNo ratings yet
- Characterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaDocument5 pagesCharacterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- S02-1 Alves de Albuquerque Time-Effective GPS Time Domain Signal Acquisition AlgorithmDocument6 pagesS02-1 Alves de Albuquerque Time-Effective GPS Time Domain Signal Acquisition AlgorithmdfaxaNo ratings yet
- Development and Test Results of A Cost Effective Inverse DGPS SystemDocument9 pagesDevelopment and Test Results of A Cost Effective Inverse DGPS SystemArindam ChakrabortyNo ratings yet
- Tutorial GPS Receiver Architectures - Front-End and Baseband Signal ProcessingDocument18 pagesTutorial GPS Receiver Architectures - Front-End and Baseband Signal Processinggaurav kumar100% (1)
- RSSI Informed Phase Method For Distance CalculationsDocument5 pagesRSSI Informed Phase Method For Distance CalculationsAndre AzevedoNo ratings yet
- Digital Pulse ProcessingDocument5 pagesDigital Pulse ProcessingNishant SinghNo ratings yet
- Digital Signal ProcessingDocument9 pagesDigital Signal ProcessingChaitanyaNo ratings yet
- Preliminary Results of Channel Characterization at 700MHz Band in Urban and Rural RegionsDocument5 pagesPreliminary Results of Channel Characterization at 700MHz Band in Urban and Rural RegionsSHAHID ALINo ratings yet
- Multipath Mitigation by Wavelet AnalysisDocument10 pagesMultipath Mitigation by Wavelet AnalysisAubin TsapongNo ratings yet
- An Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IIDocument11 pagesAn Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IILucas MarinhoNo ratings yet
- 4-Multitarget AOA Estimation Using Wideband LFMCW Signal and Two Receiver AntennasDocument12 pages4-Multitarget AOA Estimation Using Wideband LFMCW Signal and Two Receiver AntennasPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- GPS Signal Acquisition and Tracking An Approach Towards Development of Software-Based GPS ReceiverDocument6 pagesGPS Signal Acquisition and Tracking An Approach Towards Development of Software-Based GPS ReceiverNaresh VlsidNo ratings yet
- A Wireless Channel Sounding System For Rapid Propagation MeasurementsDocument6 pagesA Wireless Channel Sounding System For Rapid Propagation MeasurementsGabriel SantosNo ratings yet
- 19940-Article Text-74945-1-10-20231026Document11 pages19940-Article Text-74945-1-10-20231026kuda babiNo ratings yet
- Enhanced Wireless Location TrackingDocument8 pagesEnhanced Wireless Location TrackingAyman AwadNo ratings yet
- A Software Defined GPSDocument6 pagesA Software Defined GPSMahmoud DoughanNo ratings yet
- Progress in Electromagnetics Research C, Vol. 11, 213-228, 2009Document16 pagesProgress in Electromagnetics Research C, Vol. 11, 213-228, 2009Karloz CondeNo ratings yet
- Direction Finding PaperDocument94 pagesDirection Finding PaperTimNo ratings yet
- New Digital Signal-Processing Approaches For Measuring Power CCDF CurvesDocument6 pagesNew Digital Signal-Processing Approaches For Measuring Power CCDF CurvesJadur RahmanNo ratings yet
- Vital Sign Monitoring Using 24GHz Bandwidth Limited FMCW RadarDocument9 pagesVital Sign Monitoring Using 24GHz Bandwidth Limited FMCW RadarpramodinibidharNo ratings yet
- Protection of Transmission Lines Using GpsDocument22 pagesProtection of Transmission Lines Using Gpsabhinandan puhanNo ratings yet
- A DATASET For GPS Spoofing Detection On Autonomous VehiclesDocument6 pagesA DATASET For GPS Spoofing Detection On Autonomous VehiclesJesús Enrique Fernández OrtegaNo ratings yet
- Digital Signal ProcessingDocument8 pagesDigital Signal Processingmattew657No ratings yet
- GNURadio As A Digital Signal Processing Environment Application To Acoustic Wireless Sensor Measurement and Time Amp Frequency Analysis of Periodic SignalsDocument4 pagesGNURadio As A Digital Signal Processing Environment Application To Acoustic Wireless Sensor Measurement and Time Amp Frequency Analysis of Periodic SignalsfredmnNo ratings yet
- A Brief Review: Compressed Sensing of ECG Signal For Wireless SystemDocument6 pagesA Brief Review: Compressed Sensing of ECG Signal For Wireless SystemAzmiNo ratings yet
- HGZ Gy GP G GNWZG SXG GN GLXGZDocument6 pagesHGZ Gy GP G GNWZG SXG GN GLXGZtahir.saleemNo ratings yet
- Sensors: Vital-Signs Detector Based On Frequency-Shift Keying RadarDocument17 pagesSensors: Vital-Signs Detector Based On Frequency-Shift Keying RadarYee Kit ChanNo ratings yet
- A Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksDocument10 pagesA Metaheuristic Approach For Propagation-Model Tuning in LTE NetworksSuranga SampathNo ratings yet
- Study of FPGA Based Multi Channel Analyzer For Gamma Ray and X Ray SpectrometryDocument5 pagesStudy of FPGA Based Multi Channel Analyzer For Gamma Ray and X Ray SpectrometryEditor IJTSRDNo ratings yet
- Beamforming Technique Assisted by Machine Learning Algorithm For Next Location PredictionDocument6 pagesBeamforming Technique Assisted by Machine Learning Algorithm For Next Location Predictiondtvt2006No ratings yet
- Bare - Conf - Dvi - SDR-Winncomm-Europe - MughalDocument1 pageBare - Conf - Dvi - SDR-Winncomm-Europe - MughalGeneration GenerationNo ratings yet
- University of Trento: Department of Information and Communication TechnologyDocument17 pagesUniversity of Trento: Department of Information and Communication TechnologyjebileeNo ratings yet
- An Interpolation Algorithm For Discrete Fourier Transforms of Weighted Damped Sinusoidal SignalsDocument9 pagesAn Interpolation Algorithm For Discrete Fourier Transforms of Weighted Damped Sinusoidal SignalsFabien CallodNo ratings yet
- Fruits Satrack DocumentationDocument22 pagesFruits Satrack Documentationmar 931996No ratings yet
- Ns2 Simulator Capabilities in Nodes Localization in Wireless NetworksDocument5 pagesNs2 Simulator Capabilities in Nodes Localization in Wireless NetworksMaris WaranNo ratings yet
- FMCW Radar ThesisDocument6 pagesFMCW Radar Thesisjanaclarkbillings100% (2)
- High Precision DSSS RF Ranging ENSCO Geolocation Navigation Tech PaperDocument6 pagesHigh Precision DSSS RF Ranging ENSCO Geolocation Navigation Tech Paperpjl112008No ratings yet
- The Application of Two Dimensional Numerical Simulation Method ofDocument7 pagesThe Application of Two Dimensional Numerical Simulation Method ofMash RanoNo ratings yet
- Ourdev 568053WOKMRYDocument12 pagesOurdev 568053WOKMRYAuston TsangNo ratings yet
- 6614 Ijwmn 05Document13 pages6614 Ijwmn 05John BergNo ratings yet
- Spectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformDocument6 pagesSpectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformCharly BskzNo ratings yet
- 1999 - Wideband Radio Channel Measurement System at 2 GHZDocument6 pages1999 - Wideband Radio Channel Measurement System at 2 GHZbajrang bansalNo ratings yet
- Remote Sensing Satellite Data Demodulation and Bit Synchronization-2Document12 pagesRemote Sensing Satellite Data Demodulation and Bit Synchronization-2IAEME PublicationNo ratings yet
- Calibrating The Standard Path Loss Model For Urban Environments Using Field Measurements and Geospatial DataDocument6 pagesCalibrating The Standard Path Loss Model For Urban Environments Using Field Measurements and Geospatial DataZoran KehlerNo ratings yet
- Radar Tech Training IOM-88 Module-CDocument55 pagesRadar Tech Training IOM-88 Module-CDedi KusnadiNo ratings yet
- TDOA WPNC - 2013 (WSN)Document4 pagesTDOA WPNC - 2013 (WSN)cuteabhi47No ratings yet
- 2004 Acoustic RangingDocument7 pages2004 Acoustic RangingMarcos Gabriel JudewiczNo ratings yet
- Application of Digital Signal Processing in Radar: A StudyDocument4 pagesApplication of Digital Signal Processing in Radar: A StudyijaertNo ratings yet
- Satellite and Receiver Phase Bias Calibration For Undifferenced Ambiguity ResolutionDocument9 pagesSatellite and Receiver Phase Bias Calibration For Undifferenced Ambiguity ResolutionBejan OvidiuNo ratings yet
- Y2015 - Parallel and Pipelined Hardware ImplementationDocument7 pagesY2015 - Parallel and Pipelined Hardware ImplementationXiaofang JiangNo ratings yet
- Faringitis StreptococcusDocument16 pagesFaringitis StreptococcusnurNo ratings yet
- Reported SpeechDocument2 pagesReported SpeechmayerlyNo ratings yet
- Saxonville CaseDocument2 pagesSaxonville Casel103m393No ratings yet
- Sentence Connectors: 1.contrast 1. A. Direct OppositionDocument8 pagesSentence Connectors: 1.contrast 1. A. Direct OppositionCathy siganNo ratings yet
- Rubrics For Field Trip 1 Reflective DiaryDocument2 pagesRubrics For Field Trip 1 Reflective DiarycrystalNo ratings yet
- SuperconductorDocument33 pagesSuperconductorCrisanta GanadoNo ratings yet
- ChitsongChen, Signalsandsystems Afreshlook PDFDocument345 pagesChitsongChen, Signalsandsystems Afreshlook PDFCarlos_Eduardo_2893No ratings yet
- MOtivating Your Teenager PDFDocument66 pagesMOtivating Your Teenager PDFElleMichelle100% (1)
- Economic Value Added in ComDocument7 pagesEconomic Value Added in Comhareshsoni21No ratings yet
- Factor Causing Habitual Viewing of Pornographic MaterialDocument64 pagesFactor Causing Habitual Viewing of Pornographic MaterialPretzjay BensigNo ratings yet
- Mirza HRM ProjectDocument44 pagesMirza HRM Projectsameer82786100% (1)
- Chapter 019Document28 pagesChapter 019Esteban Tabares GonzalezNo ratings yet
- Claribel Ria MaeDocument19 pagesClaribel Ria MaeGLENN MENDOZANo ratings yet
- 7cc003 Assignment DetailsDocument3 pages7cc003 Assignment Detailsgeek 6489No ratings yet
- Hydrogen Peroxide DripDocument13 pagesHydrogen Peroxide DripAya100% (1)
- (Abhijit Champanerkar, Oliver Dasbach, Efstratia K (B-Ok - Xyz)Document273 pages(Abhijit Champanerkar, Oliver Dasbach, Efstratia K (B-Ok - Xyz)gogNo ratings yet
- K.M Nanavati v. State of MaharashtraDocument6 pagesK.M Nanavati v. State of MaharashtraPushpank PandeyNo ratings yet
- How To Create Partner Function in SAP ABAPDocument5 pagesHow To Create Partner Function in SAP ABAPRommel SorengNo ratings yet
- Jurnal Politik Dan Cinta Tanah Air Dalam Perspektif IslamDocument9 pagesJurnal Politik Dan Cinta Tanah Air Dalam Perspektif Islamalpiantoutina12No ratings yet
- Desire of Ages Chapter-33Document3 pagesDesire of Ages Chapter-33Iekzkad Realvilla100% (1)
- Calcined Clays For Sustainable Concrete Karen Scrivener, AurÇlie Favier, 2015Document552 pagesCalcined Clays For Sustainable Concrete Karen Scrivener, AurÇlie Favier, 2015Débora BretasNo ratings yet
- Concrete Design Using PROKONDocument114 pagesConcrete Design Using PROKONHesham Mohamed100% (2)
- Introduction To PTC Windchill PDM Essentials 11.1 For Light UsersDocument6 pagesIntroduction To PTC Windchill PDM Essentials 11.1 For Light UsersJYNo ratings yet
- Music 20 Century: What You Need To Know?Document8 pagesMusic 20 Century: What You Need To Know?Reinrick MejicoNo ratings yet
- Acfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptDocument1 pageAcfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptbbNo ratings yet
- Evaluation of The Agricultural Land Utilization Types For Mitigation of Land Degradation in Giritirta, Pejawaran, BanjarnegaraDocument15 pagesEvaluation of The Agricultural Land Utilization Types For Mitigation of Land Degradation in Giritirta, Pejawaran, BanjarnegaraTasyaNo ratings yet
- Los Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Document375 pagesLos Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Todo NoticiasNo ratings yet
- Pilot SafetyDocument120 pagesPilot SafetyamilaNo ratings yet
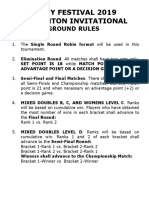
- Ground Rules 2019Document3 pagesGround Rules 2019Jeremiah Miko LepasanaNo ratings yet
- 2,3,5 Aqidah Dan QHDocument5 pages2,3,5 Aqidah Dan QHBang PaingNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsFrom EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationNo ratings yet
- CISSP: 3 in 1- Beginner's Guide + Tips and Tricks + Simple and Effective Strategies to Learn About Information Systems SecurityFrom EverandCISSP: 3 in 1- Beginner's Guide + Tips and Tricks + Simple and Effective Strategies to Learn About Information Systems SecurityNo ratings yet
- CWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108From EverandCWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108No ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)