You might also like
- Percentage CalcDocument2 pagesPercentage CalcShahnawaz MustafaNo ratings yet
- Lecture 7 (Seismic Zonation of India)Document3 pagesLecture 7 (Seismic Zonation of India)Shahnawaz MustafaNo ratings yet
- Backup File CodeDocument2 pagesBackup File CodeShahnawaz MustafaNo ratings yet
- 5 1 GL GL SUL 00004 WellWizard Server 7.0 ManualDocument264 pages5 1 GL GL SUL 00004 WellWizard Server 7.0 ManualShahnawaz MustafaNo ratings yet
- Deserts: SS 2005, Elsevier Ltd. All Rights ReservedDocument3 pagesDeserts: SS 2005, Elsevier Ltd. All Rights ReservedShahnawaz MustafaNo ratings yet
- 12 Chapter1Document8 pages12 Chapter1Shahnawaz MustafaNo ratings yet
- 5 1 GL GL SUL 00004 WellWizard Server 7.0 ManualDocument264 pages5 1 GL GL SUL 00004 WellWizard Server 7.0 ManualShahnawaz MustafaNo ratings yet
- CODEDocument1 pageCODEShahnawaz MustafaNo ratings yet
- Products of Weathering PDFDocument1 pageProducts of Weathering PDFShahnawaz MustafaNo ratings yet
- Products of Weathering PDFDocument1 pageProducts of Weathering PDFShahnawaz MustafaNo ratings yet
- Types of Metamorphism 3 PDFDocument1 pageTypes of Metamorphism 3 PDFShahnawaz MustafaNo ratings yet
- Types of Metamorphism 3 PDFDocument1 pageTypes of Metamorphism 3 PDFShahnawaz MustafaNo ratings yet
- Map 1Document1 pageMap 1Shahnawaz MustafaNo ratings yet
- Metamorphism and ControlsDocument3 pagesMetamorphism and ControlsShahnawaz MustafaNo ratings yet
- Cycle of ErosionDocument1 pageCycle of ErosionShahnawaz MustafaNo ratings yet
- Catastrophism and UniformitarianismDocument2 pagesCatastrophism and UniformitarianismShahnawaz MustafaNo ratings yet
- Earthquakes ImportanceDocument2 pagesEarthquakes ImportanceShahnawaz MustafaNo ratings yet
- Geological History of PelecypodaDocument2 pagesGeological History of PelecypodaShahnawaz MustafaNo ratings yet
- Dip and Strike Problem PDFDocument2 pagesDip and Strike Problem PDFShahnawaz MustafaNo ratings yet
- Determination of TrueDipDocument3 pagesDetermination of TrueDipShahnawaz MustafaNo ratings yet
- Cutoff Jun2017Document1 pageCutoff Jun2017krishnaNo ratings yet
- Causes of Land SlidesDocument1 pageCauses of Land SlidesShahnawaz MustafaNo ratings yet
- Base Level ErosionDocument2 pagesBase Level ErosionShahnawaz MustafaNo ratings yet
- Class Notes of ImmunologyDocument66 pagesClass Notes of ImmunologyGnaneshwar NaaniNo ratings yet
- Animal Physiology PDFDocument111 pagesAnimal Physiology PDFShahnawaz MustafaNo ratings yet
- Jammu & Kashmir Entrepreneurship Development Institute Sempora, Pampore-192121Document7 pagesJammu & Kashmir Entrepreneurship Development Institute Sempora, Pampore-192121Shahnawaz MustafaNo ratings yet
- Introduction To Computer SoftwareDocument13 pagesIntroduction To Computer SoftwareShahnawaz MustafaNo ratings yet
- Blood Relations Shortcut Tricks PDFDocument12 pagesBlood Relations Shortcut Tricks PDFVetriSelvan NagarajanNo ratings yet
- Few Imp - Palaces in India PDFDocument1 pageFew Imp - Palaces in India PDFShahnawaz MustafaNo ratings yet
- PDF by IshfaqDocument52 pagesPDF by IshfaqShahnawaz MustafaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ak-Cc 460Document30 pagesAk-Cc 460Øyvind SkulstadNo ratings yet
- Cat Apem Ermec Nuevo Catalogo General de Pulsadores Interruptores Apem Big Blue 2011 12Document589 pagesCat Apem Ermec Nuevo Catalogo General de Pulsadores Interruptores Apem Big Blue 2011 12Josue BerzunzaNo ratings yet
- Thermodynamics by S K MondalDocument95 pagesThermodynamics by S K MondalRitu Raj RamanNo ratings yet
- Usepa - 3051 ADocument30 pagesUsepa - 3051 Awrangel_2No ratings yet
- Quick Guide To Beam Analysis Using Strand7Document15 pagesQuick Guide To Beam Analysis Using Strand7Tarek AbulailNo ratings yet
- Astm E2583Document3 pagesAstm E2583Eliana salamancaNo ratings yet
- Course Structure B.tech.2012-13Document4 pagesCourse Structure B.tech.2012-13fortunatesanjibNo ratings yet
- Standard Method For Making and Curing Cubes Made From Pre-Bagged Grouts and Polymer Modified Mortars PDFDocument7 pagesStandard Method For Making and Curing Cubes Made From Pre-Bagged Grouts and Polymer Modified Mortars PDFVCNo ratings yet
- C-05 April - May-2012Document30 pagesC-05 April - May-2012John SandaNo ratings yet
- Chapter 16. PolymersDocument4 pagesChapter 16. PolymersAnonNo ratings yet
- GMAT QUANT TOPIC 3 (Inequalities + Absolute Value) SolutionsDocument46 pagesGMAT QUANT TOPIC 3 (Inequalities + Absolute Value) SolutionsBhagath GottipatiNo ratings yet
- 1.1 Waves and Particles According To Classical PhysicsDocument8 pages1.1 Waves and Particles According To Classical PhysicsLUCKY KUSHWAHANo ratings yet
- Vib PDFDocument2 pagesVib PDFprasanna1990No ratings yet
- 9487-Physics Teachers' Guide Unit 2 - Electricity, Electrons and Energy LevelsDocument141 pages9487-Physics Teachers' Guide Unit 2 - Electricity, Electrons and Energy LevelsAli AkbarNo ratings yet
- Hw2 Machining Solutions 2016Document9 pagesHw2 Machining Solutions 2016BARNABAS DOGONo ratings yet
- Supplee's ParadoxDocument3 pagesSupplee's Paradoxperception888No ratings yet
- Lecture-1 Introduction To Power Generation and Electrical Power SystemsDocument28 pagesLecture-1 Introduction To Power Generation and Electrical Power SystemsHassanAhmed124No ratings yet
- As 1012.11-2000 Methods of Testing Concrete - DeterminationDocument9 pagesAs 1012.11-2000 Methods of Testing Concrete - Determinationmm100% (1)
- Control and Interfacing of BLDC Motor With Labview Using MyrioDocument5 pagesControl and Interfacing of BLDC Motor With Labview Using Myriovasu_koneti5124No ratings yet
- Considerations For Operating Pressure Vessels Below - 20°F PDFDocument14 pagesConsiderations For Operating Pressure Vessels Below - 20°F PDFAdnan SheikhNo ratings yet
- IPT2020 Problem01 - CumulativeCannon MIPTDocument31 pagesIPT2020 Problem01 - CumulativeCannon MIPT林凱文No ratings yet
- MathsDocument2 pagesMathsAditya Singh PatelNo ratings yet
- Compass SurveyingDocument22 pagesCompass SurveyingCharles Carpo46% (13)
- Tutorial 5 - Entropy and Gibbs Free Energy - Answers PDFDocument5 pagesTutorial 5 - Entropy and Gibbs Free Energy - Answers PDFAlfaiz Radea ArbiandaNo ratings yet
- Gabion Wall Design - 4.0 MTR Above GLDocument8 pagesGabion Wall Design - 4.0 MTR Above GLAnkush SharmaNo ratings yet
- 1980-Simplified Cracked Section AnalysisDocument6 pages1980-Simplified Cracked Section AnalysisChan Dara Koem100% (1)
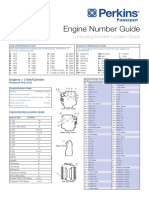
- Engine Number Guide (2-Page)Document2 pagesEngine Number Guide (2-Page)Abdul KhaliqNo ratings yet
- Perhitungan Sabuk Ties TC Potain MCR 225ADocument15 pagesPerhitungan Sabuk Ties TC Potain MCR 225AsuryaNo ratings yet
- Geotechnical Variation of London Clay Across Central LondonDocument12 pagesGeotechnical Variation of London Clay Across Central LondonChiaraNo ratings yet
- Comparative Study of Performance of CDS, CdSeDocument7 pagesComparative Study of Performance of CDS, CdSeAli AhmedNo ratings yet