You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Exodus Post Apocalyptic PDF 10Document2 pagesExodus Post Apocalyptic PDF 10RushabhNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- FIRE Protection Engineering Winter 2002Document64 pagesFIRE Protection Engineering Winter 2002Hany RifaatNo ratings yet
- SuperstringsDocument65 pagesSuperstringsunima3610No ratings yet
- Health EconomicsDocument114 pagesHealth EconomicsGeneva Ruz BinuyaNo ratings yet
- Germ TheoryDocument15 pagesGerm TheoryjackjugNo ratings yet
- ML Performance Improvement CheatsheetDocument11 pagesML Performance Improvement Cheatsheetrahulsukhija100% (1)
- Sons and Lovers AuthorDocument9 pagesSons and Lovers AuthorArmen NeziriNo ratings yet
- Registration details of employees and business ownersDocument61 pagesRegistration details of employees and business ownersEMAMNNo ratings yet
- History of AlgebraDocument234 pagesHistory of Algebraunima3610No ratings yet
- TesiDocument212 pagesTesigyirgaNo ratings yet
- Space and TimeDocument60 pagesSpace and Timeunima3610No ratings yet
- QM Graphic DynamicsDocument26 pagesQM Graphic Dynamicsunima3610No ratings yet
- Hydrogen Atom 2DDocument8 pagesHydrogen Atom 2Dunima3610No ratings yet
- IpparcoDocument15 pagesIpparcounima3610No ratings yet
- Hamiltonian PerturbationDocument104 pagesHamiltonian Perturbationunima3610No ratings yet
- Cauchy Integral FormulaDocument198 pagesCauchy Integral Formulaunima3610No ratings yet
- Funky Math PhysicsDocument205 pagesFunky Math PhysicsFredrick MutungaNo ratings yet
- Cauchy Theorem Quick ProofDocument1 pageCauchy Theorem Quick Proofunima3610No ratings yet
- Analysis VeblenDocument189 pagesAnalysis Veblenunima3610No ratings yet
- Almost Periodic FunctionsDocument192 pagesAlmost Periodic Functionsunima3610No ratings yet
- QFT BoccioDocument63 pagesQFT Bocciounima3610No ratings yet
- The Quasi-Elliptic Motion of The MoonDocument12 pagesThe Quasi-Elliptic Motion of The Moonunima3610No ratings yet
- Orbital AveragesDocument13 pagesOrbital Averagesunima3610No ratings yet
- Generalized Laplace Coefficients and Newcomb DerivativesDocument10 pagesGeneralized Laplace Coefficients and Newcomb Derivativesunima3610No ratings yet
- Higher-Order Corrections To The Relativistic Perihelion Advance and The Mass of Binary Pulsars.Document8 pagesHigher-Order Corrections To The Relativistic Perihelion Advance and The Mass of Binary Pulsars.unima3610No ratings yet
- On The Computation of The Laplace CoefficientsDocument3 pagesOn The Computation of The Laplace Coefficientsunima3610No ratings yet
- The Gravitational EllipseDocument10 pagesThe Gravitational Ellipseunima3610100% (3)
- Central Forces and Secular Perihelion MotionDocument8 pagesCentral Forces and Secular Perihelion Motionunima3610No ratings yet
- The First-Order Orbital EquationDocument4 pagesThe First-Order Orbital Equationunima3610100% (1)
- Masala Kitchen Menus: Chowpatty ChatDocument6 pagesMasala Kitchen Menus: Chowpatty ChatAlex ShparberNo ratings yet
- New Titles List 2014, Issue 1Document52 pagesNew Titles List 2014, Issue 1Worldwide Books CorporationNo ratings yet
- Simon Baumberg - Prokaryotic Gene ExpressionDocument348 pagesSimon Baumberg - Prokaryotic Gene ExpressionBodhi Dharma0% (1)
- Cronograma Ingles I v2Document1 pageCronograma Ingles I v2Ariana GarciaNo ratings yet
- CPARDocument22 pagesCPARAngelo Christian MandarNo ratings yet
- Vietnamese Grammar Questions and Answers DocumentDocument1 pageVietnamese Grammar Questions and Answers DocumentMinJenNo ratings yet
- Score:: A. Double - Napped Circular ConeDocument3 pagesScore:: A. Double - Napped Circular ConeCarmilleah FreyjahNo ratings yet
- Unit 4 Trade Discounts Cash Discounts MarkupDocument42 pagesUnit 4 Trade Discounts Cash Discounts MarkupChimwemwe MaoleNo ratings yet
- Essay A Level Drama and Theatee Studies A LevelDocument2 pagesEssay A Level Drama and Theatee Studies A LevelSofia NietoNo ratings yet
- M5-2 CE 2131 Closed Traverse - Interior Angles V2021Document19 pagesM5-2 CE 2131 Closed Traverse - Interior Angles V2021Kiziahlyn Fiona BibayNo ratings yet
- Chapter 1 Introduction To Management and OrganisationDocument34 pagesChapter 1 Introduction To Management and Organisationsahil malhotraNo ratings yet
- Veerabhadra Swamy MantrasDocument6 pagesVeerabhadra Swamy Mantrasगणेश पराजुलीNo ratings yet
- Giles. Saint Bede, The Complete Works of Venerable Bede. 1843. Vol. 8.Document471 pagesGiles. Saint Bede, The Complete Works of Venerable Bede. 1843. Vol. 8.Patrologia Latina, Graeca et Orientalis100% (1)
- Group 1 RDL2Document101 pagesGroup 1 RDL2ChristelNo ratings yet
- Journal of Ethnic Foods: Angelina Rianti, Agnes E. Novenia, Alvin Christopher, Devi Lestari, Elfa K. ParassihDocument6 pagesJournal of Ethnic Foods: Angelina Rianti, Agnes E. Novenia, Alvin Christopher, Devi Lestari, Elfa K. ParassihHerlinaNo ratings yet
- Photojournale - Connections Across A Human PlanetDocument75 pagesPhotojournale - Connections Across A Human PlanetjohnhorniblowNo ratings yet
- Reducing Work Related Psychological Ill Health and Sickness AbsenceDocument15 pagesReducing Work Related Psychological Ill Health and Sickness AbsenceBM2062119PDPP Pang Kuok WeiNo ratings yet
- GNED 500 Social AnalysisDocument2 pagesGNED 500 Social AnalysisEshita SinhaNo ratings yet
- 02 Cost of Capital QBDocument26 pages02 Cost of Capital QBAbhi JayakumarNo ratings yet
- Enterprise Information Management (EIM) : by Katlego LeballoDocument9 pagesEnterprise Information Management (EIM) : by Katlego LeballoKatlego LeballoNo ratings yet
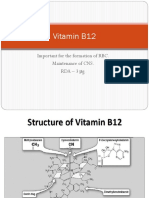
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 pagesVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNo ratings yet
- Listening LP1Document6 pagesListening LP1Zee KimNo ratings yet
- Us Aers Roadmap Noncontrolling Interest 2019 PDFDocument194 pagesUs Aers Roadmap Noncontrolling Interest 2019 PDFUlii PntNo ratings yet