You might also like
- Chevy Differentials: How to Rebuild the 10- and 12-BoltFrom EverandChevy Differentials: How to Rebuild the 10- and 12-BoltRating: 5 out of 5 stars5/5 (8)
- Round A Bot DR3 PresentationDocument52 pagesRound A Bot DR3 Presentationkimdl5No ratings yet
- Donny’S Unauthorized Technical Guide to Harley-Davidson, 1936 to Present: Volume Iv: Performancing the EvolutionFrom EverandDonny’S Unauthorized Technical Guide to Harley-Davidson, 1936 to Present: Volume Iv: Performancing the EvolutionRating: 4 out of 5 stars4/5 (1)
- Schaku Coupler - ICF Des..Document20 pagesSchaku Coupler - ICF Des..Sumit Shyamal33% (3)
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Round-a-Bot: Holonomic Inverted Pendulum Robot: ME 552 Final Report - 20 December 2010Document5 pagesRound-a-Bot: Holonomic Inverted Pendulum Robot: ME 552 Final Report - 20 December 2010kimdl5No ratings yet
- Round-a-Bot: ME552 Final PresentationDocument21 pagesRound-a-Bot: ME552 Final Presentationkimdl5No ratings yet
- Epicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Document9 pagesEpicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Arnold ChafewaNo ratings yet
- Wheel Balancing MachineDocument26 pagesWheel Balancing MachinePatrick Marc Brunelle100% (2)
- Irs Point MachineDocument60 pagesIrs Point MachineNaga Raju100% (2)
- Bogies PPT NEWDocument15 pagesBogies PPT NEWOlinuf GutuNo ratings yet
- Robotics and Embedded Systems Sig 1: Basics & Mechanical BotDocument30 pagesRobotics and Embedded Systems Sig 1: Basics & Mechanical BotAryan MittalNo ratings yet
- Project Electric BikeDocument28 pagesProject Electric Bikeachint9100% (1)
- Sae Baja India 2011 (FDR)Document22 pagesSae Baja India 2011 (FDR)Rahul ReddyNo ratings yet
- User'S Manual: Bpm-Downhole MotorDocument80 pagesUser'S Manual: Bpm-Downhole MotorXueying LiNo ratings yet
- Gear Design ProcedureDocument9 pagesGear Design Procedurenithree100% (1)
- Me6612 Design &fabrication Project: Design and Fabrication of Automotive Side Stand Retrieve SystemDocument18 pagesMe6612 Design &fabrication Project: Design and Fabrication of Automotive Side Stand Retrieve SystemBlessly PrinceNo ratings yet
- Converting Car Starter Motors For Your Robot: 2.1 Disconnecting The Field WindingDocument9 pagesConverting Car Starter Motors For Your Robot: 2.1 Disconnecting The Field WindingSenadGrabovacNo ratings yet
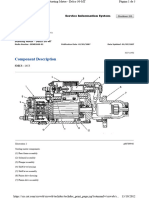
- Component DescriptionDocument5 pagesComponent DescriptionWillian HPNo ratings yet
- Helicopter Rotor System and DesignDocument27 pagesHelicopter Rotor System and DesignSumeet Ghodke75% (8)
- Coach & Wagon BogiesDocument156 pagesCoach & Wagon BogiesAmanpreet Singh100% (1)
- RoboTurk Team DescriptionDocument12 pagesRoboTurk Team DescriptionkfuScribdNo ratings yet
- Brake Report 2015Document38 pagesBrake Report 2015Pratyush NagareNo ratings yet
- Parsian Team Description For Robocup 2011Document10 pagesParsian Team Description For Robocup 2011Chris 'Whumew' MichalakNo ratings yet
- Ball Traction Drive - FinalDocument46 pagesBall Traction Drive - FinalTejas Shete0% (1)
- Axe RobotDocument6 pagesAxe RobotJhonatan Alexander Becerra DuitamaNo ratings yet
- Servo Motor Design Using MotorSolveDocument20 pagesServo Motor Design Using MotorSolveSK PNo ratings yet
- Robot Chassis and Drivetrain FundamentalsDocument65 pagesRobot Chassis and Drivetrain Fundamentalss.b.v.seshagiri1407No ratings yet
- Design Calculations of A Two Wheeler Self Balanced VehicleDocument10 pagesDesign Calculations of A Two Wheeler Self Balanced VehicleA.G. AshishNo ratings yet
- Three WheelerDocument11 pagesThree WheelerSadhiq AERUKADAN METHALNo ratings yet
- The Electromechanical Parking BrakeDocument36 pagesThe Electromechanical Parking BrakeDragos1993100% (2)
- Wheel Balancing Machine PDFDocument26 pagesWheel Balancing Machine PDFSrinivas100% (1)
- Chessbot - Final PaperDocument6 pagesChessbot - Final PaperSandeep KumarNo ratings yet
- 153698234-Summer-Training-Report-at - Jtekt .Document42 pages153698234-Summer-Training-Report-at - Jtekt .Amit AryaNo ratings yet
- Team-Scorpion: Karthik Shenoy Sushant Khade Sachin Sharma Darshan BangDocument8 pagesTeam-Scorpion: Karthik Shenoy Sushant Khade Sachin Sharma Darshan BangRohan NairNo ratings yet
- Harshit Robotics 10Document13 pagesHarshit Robotics 10harshitkargathara21No ratings yet
- Self Balancing Robot ProposalDocument8 pagesSelf Balancing Robot ProposalbhanuNo ratings yet
- 30 RPM Center Shaft Brmetal Gear DC Motor For ArduinobrRaspberry PiRobotics RM0791 BY ROBOMART October 13 2018 2 42 PMDocument3 pages30 RPM Center Shaft Brmetal Gear DC Motor For ArduinobrRaspberry PiRobotics RM0791 BY ROBOMART October 13 2018 2 42 PMshrNo ratings yet
- By Ms. Soh Ley Bau Generation Section - Electrical Unit (Ilsas), TNBDocument137 pagesBy Ms. Soh Ley Bau Generation Section - Electrical Unit (Ilsas), TNBAriee Arie100% (2)
- STP 1212Document22 pagesSTP 1212waleedyehiaNo ratings yet
- Prepared By: Line Following RobotDocument9 pagesPrepared By: Line Following RobotShayan FarrukhNo ratings yet
- Design Basic of Industrial Gear BoxesDocument84 pagesDesign Basic of Industrial Gear Boxesalfatih1407497100% (2)
- Machine Tool Design - MTD Handbook/NotesDocument62 pagesMachine Tool Design - MTD Handbook/NotesOnkar Kakad100% (2)
- Ishaq Final Year Project Report PDFDocument28 pagesIshaq Final Year Project Report PDFAmazon fbaNo ratings yet
- Centrifugal Feeder DesignDocument12 pagesCentrifugal Feeder DesignJuan Jose Barrios SanchezNo ratings yet
- Gear Box Project Guide LinesDocument12 pagesGear Box Project Guide LinesteddiyfentawNo ratings yet
- Demu BogieDocument41 pagesDemu BogieLove TodkarNo ratings yet
- Kachow Finaldesignreport-1Document19 pagesKachow Finaldesignreport-1api-541885234No ratings yet
- 276 2600 Clawbot Inst 0512Document20 pages276 2600 Clawbot Inst 0512Cesar ChavezNo ratings yet
- STP550Document22 pagesSTP550waleedyehia0% (1)
- الساقيه توضيح الاجزاء والمكونات PDFDocument17 pagesالساقيه توضيح الاجزاء والمكونات PDFMohamed AbdoNo ratings yet
- How A Torque Converter Works PDFDocument8 pagesHow A Torque Converter Works PDFtsegay teklayeNo ratings yet
- New Friction Mechanical TransmissionDocument5 pagesNew Friction Mechanical TransmissionInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Side Stand Retrieving System For Two WheelersDocument31 pagesSide Stand Retrieving System For Two WheelersAakash DindigulNo ratings yet
- Dump Truck: Model Code: Nominal Payload With Standard Equipment: Target Gross Machine Operating Weight: EngineDocument7 pagesDump Truck: Model Code: Nominal Payload With Standard Equipment: Target Gross Machine Operating Weight: Enginephutd09No ratings yet
- Motor StatorDocument6 pagesMotor StatorNhan LeNo ratings yet
- CH16Document33 pagesCH16Dhiraj ZanzadNo ratings yet
- Machine Design Project IIDocument5 pagesMachine Design Project IIYigremachew bizualew AyenewNo ratings yet
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocument10 pagesDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamNo ratings yet
- The Diesel LocomotiveDocument24 pagesThe Diesel LocomotivePool KingNo ratings yet
- Sandvik DD210Document4 pagesSandvik DD210Lener Elvin Lopez LavadoNo ratings yet
- Genmega G2500Document103 pagesGenmega G2500tchindaforentNo ratings yet
- The Interrelationship Between Fashion andDocument17 pagesThe Interrelationship Between Fashion andpushpak navandarNo ratings yet
- Manual DessertDocument32 pagesManual DessertDANIEL F. HERNANDEZ100% (1)
- 2020 Sustainabilty Report - ENDocument29 pages2020 Sustainabilty Report - ENGeraldNo ratings yet
- ESL Discussion Questions To Practise IdiomsDocument5 pagesESL Discussion Questions To Practise IdiomsElaine Mc AuliffeNo ratings yet
- Penerapan Metode Sonikasi Terhadap Adsorpsi FeIIIDocument6 pagesPenerapan Metode Sonikasi Terhadap Adsorpsi FeIIIappsNo ratings yet
- Evolution of Indian TolucaDocument28 pagesEvolution of Indian TolucaAlberto Duran IniestraNo ratings yet
- Airborne Doppler Radar Navigation of Jet Transport Aircraft-EftDocument10 pagesAirborne Doppler Radar Navigation of Jet Transport Aircraft-Eftjulio perezNo ratings yet
- EN 301.908-2 Ver 3.2.1Document37 pagesEN 301.908-2 Ver 3.2.1DHDIDIDNo ratings yet
- Testing Fire-ProtectionDocument2 pagesTesting Fire-Protectionmia murciaNo ratings yet
- User Manual For Emvólio: WWW - Blackfrog.InDocument22 pagesUser Manual For Emvólio: WWW - Blackfrog.InmariaNo ratings yet
- Turnitin Originality ReportDocument20 pagesTurnitin Originality ReportNaomi Deirdre ReyesNo ratings yet
- Denel Dynamics Product Brochure PDFDocument36 pagesDenel Dynamics Product Brochure PDFeggboy196967% (3)
- Newton Interviews - Tookie AngusDocument12 pagesNewton Interviews - Tookie AngusPeter BellNo ratings yet
- Trane 5 Ton HP Cond submittat4TWB3060-SUB-106 - 05.05 - 11012009Document2 pagesTrane 5 Ton HP Cond submittat4TWB3060-SUB-106 - 05.05 - 11012009nobleairNo ratings yet
- S.No. Components Makes: 1 Grab Cranes - Gantry TypeDocument4 pagesS.No. Components Makes: 1 Grab Cranes - Gantry TypeHarish KumarNo ratings yet
- Brooding and Rearing Baby ChicksDocument4 pagesBrooding and Rearing Baby ChicksRaymond KatabaziNo ratings yet
- Iec 62031 PDFDocument16 pagesIec 62031 PDFAlbertoNo ratings yet
- Oscillations NotesDocument48 pagesOscillations Notesabdulrehman881122No ratings yet
- Bruker d8 XRD TutoriallDocument16 pagesBruker d8 XRD TutoriallravarNo ratings yet
- Rule 8. Fire Safety Enforcers Chapter 1. Qualifications of Fire Safety Enforcers Division 1. Minimum RequirementsDocument13 pagesRule 8. Fire Safety Enforcers Chapter 1. Qualifications of Fire Safety Enforcers Division 1. Minimum Requirementspatitay036817No ratings yet
- Morning Star Cafe Menu Revised 08-14-2019 On Line Menu 1Document2 pagesMorning Star Cafe Menu Revised 08-14-2019 On Line Menu 1api-471935951No ratings yet
- Introduction To Mass Transfer - Part 1Document39 pagesIntroduction To Mass Transfer - Part 1Biniyam haile100% (1)
- Bolt Group Coefficient For Eccentric Loads PDFDocument5 pagesBolt Group Coefficient For Eccentric Loads PDFdvelchevNo ratings yet
- P1 - Duct Design IntroductionDocument30 pagesP1 - Duct Design IntroductionAndryx MartinezNo ratings yet
- SAIC N 2023 PreQualTestApplicator&AppProcCastRefract EL Rev2Document3 pagesSAIC N 2023 PreQualTestApplicator&AppProcCastRefract EL Rev2Anonymous S9qBDVkyNo ratings yet
- MantrasDocument45 pagesMantrasharibhakta100% (1)
- Design & Fabrication of Low Cost Small-Scale Fatigue Testing MachineDocument12 pagesDesign & Fabrication of Low Cost Small-Scale Fatigue Testing MachinekshitijNo ratings yet
- Marshall Abby - Chess Cafe - The Openings Explained - 1-63, 2015-OCR, 682pDocument682 pagesMarshall Abby - Chess Cafe - The Openings Explained - 1-63, 2015-OCR, 682pArtur MałkowskiNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Smart Power Distribution Systems: Control, Communication, and OptimizationFrom EverandSmart Power Distribution Systems: Control, Communication, and OptimizationNo ratings yet
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyFrom EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyRating: 5 out of 5 stars5/5 (3)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsFrom EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNo ratings yet
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksFrom EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet