You might also like
- Manual On Power System ProtectionDocument393 pagesManual On Power System ProtectionSakthi Murugan88% (17)
- Manufacturer MumbaiDocument336 pagesManufacturer MumbaiNafa NuksanNo ratings yet
- 05 - SRX NatDocument44 pages05 - SRX NatLuc TranNo ratings yet
- Links To GoodnessDocument194 pagesLinks To GoodnessKevin Itwaru0% (3)
- Op Amps: Design, Application, and TroubleshootingFrom EverandOp Amps: Design, Application, and TroubleshootingRating: 5 out of 5 stars5/5 (2)
- Parts Price ListDocument5,325 pagesParts Price ListAlva100% (1)
- GDN-206 - Guidelines On Safety Management System in Petroleum IndustryDocument49 pagesGDN-206 - Guidelines On Safety Management System in Petroleum IndustrykarpanaiNo ratings yet
- F5 - LTM TrainingDocument9 pagesF5 - LTM TrainingAliNo ratings yet
- ECN 413-ECN 425-ERN 412-ERN 487 EncodersDocument6 pagesECN 413-ECN 425-ERN 412-ERN 487 EncodersMohammad ShayebNo ratings yet
- YAKO Close Loop Motor and DriveDocument1 pageYAKO Close Loop Motor and DriveAnonymous m36V0bvzNo ratings yet
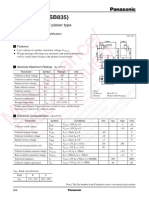
- Maintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDocument3 pagesMaintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- Maintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDocument3 pagesMaintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- PQ2CF1: TO-220 Package, Step Up Output Chopper Regulator (Under Development)Document4 pagesPQ2CF1: TO-220 Package, Step Up Output Chopper Regulator (Under Development)Nikita KaplenkoNo ratings yet
- Motor Feedback Evaluation KitDocument4 pagesMotor Feedback Evaluation Kitnunes999No ratings yet
- Compact, Surface Mount Ultra-High Speed Response OPIC PhotocouplerDocument6 pagesCompact, Surface Mount Ultra-High Speed Response OPIC PhotocouplerZackyExlipzNo ratings yet
- PC410 DatasheetDocument5 pagesPC410 DatasheetJuan CarlosNo ratings yet
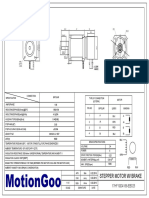
- Motiongoo Stepper Motor With Brake Drawing-17HF19D4168-EB025Document1 pageMotiongoo Stepper Motor With Brake Drawing-17HF19D4168-EB025Make RownNo ratings yet
- XF9 (Auxiliary Contact For Nb1, Nbh8, Nb1L, Nb3Le, Nbh8Le) : Standard IEC/EN 60947-5-1Document2 pagesXF9 (Auxiliary Contact For Nb1, Nbh8, Nb1L, Nb3Le, Nbh8Le) : Standard IEC/EN 60947-5-1Cristian MarchisNo ratings yet
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocument1 pageSilicon NPN Triple Diffusion Mesa Type: Power TransistorsRonald NievesNo ratings yet
- PC 814Document5 pagesPC 814matemancNo ratings yet
- AN5165KDocument25 pagesAN5165KTecnico GenioNo ratings yet
- Silicon NPN Triple Diffusion Planar Type: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Planar Type: Power TransistorsNicolás CastroNo ratings yet
- Maintenance/ Discontinued: AN6557, AN6558, AN6558SDocument4 pagesMaintenance/ Discontinued: AN6557, AN6558, AN6558SAnkit DashNo ratings yet
- 2SC5914Document4 pages2SC5914yiyus1No ratings yet
- Motiongoo Stepper Motor Drawing-17HT19S4168C1Document1 pageMotiongoo Stepper Motor Drawing-17HT19S4168C1Make RownNo ratings yet
- PC851Document4 pagesPC851Amit Kumar LalNo ratings yet
- X2Y F & D C: Ilter Ecoupling ApacitorsDocument4 pagesX2Y F & D C: Ilter Ecoupling ApacitorsamirNo ratings yet
- Low Voltage Dual 35mW Audio Power Amplifier Circuits (BTL 300mW)Document3 pagesLow Voltage Dual 35mW Audio Power Amplifier Circuits (BTL 300mW)Sergiu SpiridonNo ratings yet
- Silicon Power Transistor: Data SheetDocument5 pagesSilicon Power Transistor: Data Sheetmobil benerNo ratings yet
- High Sensitivity Type PhotocouplerDocument5 pagesHigh Sensitivity Type PhotocouplercobaNo ratings yet
- RN2131FV, RN2132FV: Switching, Inverter Circuit, Interface Circuit and Driver Circuit ApplicationsDocument5 pagesRN2131FV, RN2132FV: Switching, Inverter Circuit, Interface Circuit and Driver Circuit ApplicationsIsaiasAvilesNo ratings yet
- Sicore EncoderDocument16 pagesSicore EncoderمحمدحمادNo ratings yet
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Mesa Type: Power Transistorsyiyus1No ratings yet
- 2M218 FrankelectronicDocument2 pages2M218 FrankelectronicPCAcevili SiqueiraNo ratings yet
- Rpi-574 Rohm Phot InterrupterDocument4 pagesRpi-574 Rohm Phot InterrupterxxNo ratings yet
- C5406 PanasonicDocument2 pagesC5406 PanasonicHernan Ortiz EnamoradoNo ratings yet
- PC400TDocument4 pagesPC400TTurkogluNo ratings yet
- High Voltage Input Amplifier Circuit For Hi-Fi Power AmplifierDocument3 pagesHigh Voltage Input Amplifier Circuit For Hi-Fi Power AmplifierilyaNo ratings yet
- Silicon NPN Epitaxial Planer Type: TransistorDocument2 pagesSilicon NPN Epitaxial Planer Type: TransistorStuxnetNo ratings yet
- 2SC5412 PanasonicSemiconductorDocument2 pages2SC5412 PanasonicSemiconductorshradha shreyaNo ratings yet
- 4-Element Graphic Equalizer IC For Radio/Radio Cassette RecorderDocument7 pages4-Element Graphic Equalizer IC For Radio/Radio Cassette RecorderDaniel RetcelNo ratings yet
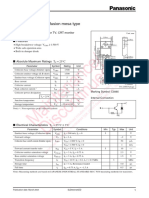
- Silicon PNP Epitaxial Planar Transistor (Complement To Type 2SC4466)Document1 pageSilicon PNP Epitaxial Planar Transistor (Complement To Type 2SC4466)isaiasvaNo ratings yet
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Mesa Type: Power Transistorsyiyus1No ratings yet
- Sound Multiplex Demodulator IC For TV in The North American MarketDocument11 pagesSound Multiplex Demodulator IC For TV in The North American MarketmellamofelipemcNo ratings yet
- AN4558Document4 pagesAN4558RnDES1 CMLNo ratings yet
- CFTL Precision DAQ Applications Brief WebDocument4 pagesCFTL Precision DAQ Applications Brief WebBuiDucVinhNo ratings yet
- EAO MC 18 Main-Catalogue ENDocument42 pagesEAO MC 18 Main-Catalogue ENrudy pumacahuaNo ratings yet
- 2M219 SERIES: Frank Electronic & Plastic Co.,LtdDocument2 pages2M219 SERIES: Frank Electronic & Plastic Co.,LtdRaul Roberto OcampoNo ratings yet
- 2m219 SeriesDocument2 pages2m219 SeriesjpserafiniNo ratings yet
- MIP0225SYDocument3 pagesMIP0225SYChekaraou MageNo ratings yet
- Silicon NPN Epitaxial Planar Transistor (Complement To Type 2SA1860)Document1 pageSilicon NPN Epitaxial Planar Transistor (Complement To Type 2SA1860)ytnateNo ratings yet
- C5884 PanasonicSemiconductorDocument3 pagesC5884 PanasonicSemiconductorsarauseopNo ratings yet
- Silicon NPN Triple Diffused Planar Transistor: (High Voltage and High Speed Switchihg Transistor)Document1 pageSilicon NPN Triple Diffused Planar Transistor: (High Voltage and High Speed Switchihg Transistor)Bernardo RatiaNo ratings yet
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocument1 pageSilicon NPN Triple Diffusion Mesa Type: Power TransistorsandibdgNo ratings yet
- 2M219 Series: H J G KDocument4 pages2M219 Series: H J G KlicorneblackNo ratings yet
- 2M219 Etc PDFDocument4 pages2M219 Etc PDFlicorneblackNo ratings yet
- C5885 PanasonicDocument3 pagesC5885 Panasonicedgar solorzanoNo ratings yet
- RMB 30Document6 pagesRMB 30Nishant KalbhorNo ratings yet
- lm5110 PDFDocument28 pageslm5110 PDFRizkyNo ratings yet
- Rod1000 2016 enDocument3 pagesRod1000 2016 enjackyNo ratings yet
- 320653NECDocument15 pages320653NECTeyfik koyuncuNo ratings yet
- Silicon NPN Triple Diffused Planar Transistor (Complement To Type 2SA1667/1668)Document1 pageSilicon NPN Triple Diffused Planar Transistor (Complement To Type 2SA1667/1668)Clément SaillantNo ratings yet
- High H L V (Sat) : FE OW CEDocument1 pageHigh H L V (Sat) : FE OW CEantonNo ratings yet
- En An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planer TypeDocument4 pagesEn An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- PC3Q71Document5 pagesPC3Q71Luis Enrique De los Santos FarfánNo ratings yet
- Copyright IP Law Infringment of CopyrightDocument45 pagesCopyright IP Law Infringment of Copyrightshree2485No ratings yet
- Vigi Module Selection PDFDocument1 pageVigi Module Selection PDFrt1973No ratings yet
- Cma Inter GR 1 Financial Accounting Ebook June 2021 OnwardsDocument358 pagesCma Inter GR 1 Financial Accounting Ebook June 2021 OnwardsSarath KumarNo ratings yet
- Indian Institute of Technology (Indian School of Mines) DhabadDocument23 pagesIndian Institute of Technology (Indian School of Mines) DhabadAmit KumarNo ratings yet
- Datascope System 98Document16 pagesDatascope System 98Guillermo ZalazarNo ratings yet
- PolisiDocument16 pagesPolisiResh 0000No ratings yet
- INTERFACING LCD WITH 8051 MIROCONTROLLER With CodeDocument14 pagesINTERFACING LCD WITH 8051 MIROCONTROLLER With CodeRajagiri CollegeNo ratings yet
- Method Statement Footing - PDF - Concrete - Deep FoundationDocument12 pagesMethod Statement Footing - PDF - Concrete - Deep FoundationJYDP RNo ratings yet
- Midterm Quiz 1 March 9.2021 QDocument5 pagesMidterm Quiz 1 March 9.2021 QThalia RodriguezNo ratings yet
- AbDocument8 pagesAbSehar BanoNo ratings yet
- Caso 1 - Tunel Sismico BoluDocument4 pagesCaso 1 - Tunel Sismico BoluCarlos Catalán CórdovaNo ratings yet
- MVC Plus User Manual REV5Document90 pagesMVC Plus User Manual REV5Adalberto FentanezNo ratings yet
- ITMC (International Transmission Maintenance Center)Document8 pagesITMC (International Transmission Maintenance Center)akilaamaNo ratings yet
- Siemens Power Engineering Guide 7E 223Document1 pageSiemens Power Engineering Guide 7E 223mydearteacherNo ratings yet
- Example of Praxis TicketDocument3 pagesExample of Praxis TicketEmily LescatreNo ratings yet
- Material Safety Data Sheet: Pilot IIDocument7 pagesMaterial Safety Data Sheet: Pilot IIBeyar. ShNo ratings yet
- Front Pages1Document5 pagesFront Pages1Anonymous g7uPednINo ratings yet
- Compound Wall Design (1) - Layout1Document1 pageCompound Wall Design (1) - Layout1SandeepNo ratings yet
- Buffett Wisdom On CorrectionsDocument2 pagesBuffett Wisdom On CorrectionsChrisNo ratings yet
- Account Statement From 1 Oct 2018 To 15 Mar 2019: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument8 pagesAccount Statement From 1 Oct 2018 To 15 Mar 2019: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalancerohantNo ratings yet
- Product Management GemsDocument14 pagesProduct Management GemsVijendra GopaNo ratings yet
- HP-exampleDocument30 pagesHP-exampleAnonymous 105zV1No ratings yet
- QuartzDocument5 pagesQuartzKannaTaniyaNo ratings yet