You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- It Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsDocument12 pagesIt Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsPushan Kumar DattaNo ratings yet
- Box 9.7: Modal Symbols: © Cambridge University Press 2009Document1 pageBox 9.7: Modal Symbols: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Success Starts With IeltsDocument43 pagesSuccess Starts With IeltsPushan Kumar DattaNo ratings yet
- CountersDocument36 pagesCountersPushan Kumar DattaNo ratings yet
- Box 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Document1 pageBox 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Document1 pageBox 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.3c: Shopping: © Cambridge University Press 2009Document1 pageBox 11.2.3c: Shopping: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 10.3a PDFDocument1 pageBox 10.3a PDFPushan Kumar DattaNo ratings yet
- Box 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Document1 pageBox 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.1.3: Occupations: © Cambridge University Press 2009Document1 pageBox 11.1.3: Occupations: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.3.2a: Similarities: © Cambridge University Press 2009Document1 pageBox 11.3.2a: Similarities: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.3a: Shopping: © Cambridge University Press 2009Document1 pageBox 11.2.3a: Shopping: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
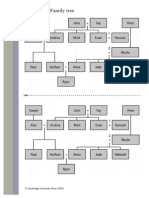
- Box 15.3a: Family Tree: © Cambridge University Press 2009Document1 pageBox 15.3a: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 15.3b: Family Tree: © Cambridge University Press 2009Document1 pageBox 15.3b: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 19.4a: Extending A Story: © Cambridge University Press 2009Document1 pageBox 19.4a: Extending A Story: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 16.8b: Who's She Talking To?: © Cambridge University Press 2009Document1 pageBox 16.8b: Who's She Talking To?: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 19.2: Relative Quizzes: © Cambridge University Press 2009Document1 pageBox 19.2: Relative Quizzes: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Assignment Applied ElectronicsDocument6 pagesAssignment Applied ElectronicsPushan Kumar DattaNo ratings yet
- Describe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachDocument15 pagesDescribe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachPushan Kumar DattaNo ratings yet
- Box 16.5b: Describe and Arrange: © Cambridge University Press 2009Document1 pageBox 16.5b: Describe and Arrange: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Systems and Applications, Mecs Publishers, 2014 (Under Review)Document3 pagesSystems and Applications, Mecs Publishers, 2014 (Under Review)Pushan Kumar DattaNo ratings yet
- Welcome To IndiaDocument7 pagesWelcome To IndiaPushan Kumar DattaNo ratings yet
- RSVP Protocol Operation in MPLSDocument2 pagesRSVP Protocol Operation in MPLSPushan Kumar DattaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Exel DataDocument129 pagesExel DataSyed0% (1)
- Panel Data Lecture NotesDocument38 pagesPanel Data Lecture NotesSanam KhanNo ratings yet
- KV PreboardDocument14 pagesKV PreboardABCNo ratings yet
- Principal Components Analysis: A How-To Manual For RDocument12 pagesPrincipal Components Analysis: A How-To Manual For RHamit AydınNo ratings yet
- CD Unit-1Document42 pagesCD Unit-1Ganesh DegalaNo ratings yet
- Data Structure and Algorithm: Sorted Doubly Link List Presented by Prabal Kumar Sahu Asst. Prof., IT Dept., BCRECDocument14 pagesData Structure and Algorithm: Sorted Doubly Link List Presented by Prabal Kumar Sahu Asst. Prof., IT Dept., BCRECA8A TechNo ratings yet
- CBSE - Senior School Certificate Examination (Class XII) Results 2017Document1 pageCBSE - Senior School Certificate Examination (Class XII) Results 2017Suman Kumar MishraNo ratings yet
- Micros Opera TdsDocument3 pagesMicros Opera Tdscuong955No ratings yet
- New Virtual JNC - SD Agent For Virtual Systems - Instruction Manual - 2018 10 - Iomvjncxxx03 en - enDocument28 pagesNew Virtual JNC - SD Agent For Virtual Systems - Instruction Manual - 2018 10 - Iomvjncxxx03 en - enspada1975No ratings yet
- How To Find If A Wage Type Is Taxable or Not - SAP Q&ADocument4 pagesHow To Find If A Wage Type Is Taxable or Not - SAP Q&AMurali MohanNo ratings yet
- Issue 106Document40 pagesIssue 106NZ Tasveer NewsNo ratings yet
- Error Handling in PHPDocument18 pagesError Handling in PHPVinit Vini JainNo ratings yet
- Stat FitDocument112 pagesStat FitedwinwwillanNo ratings yet
- Data Normalization and StandardizationDocument6 pagesData Normalization and StandardizationAllan SilvaNo ratings yet
- CUDA - Quick Reference PDFDocument2 pagesCUDA - Quick Reference PDFjmlescainNo ratings yet
- Heap TreesDocument3 pagesHeap TreesNaomi BelonioNo ratings yet
- LTIB For I.mx28 A Step-By-step GuideDocument10 pagesLTIB For I.mx28 A Step-By-step Guideವಿನಯ್ ಶಿವ ರಾಮ್No ratings yet
- Google Earth WorksheetDocument8 pagesGoogle Earth Worksheetrtoth100% (2)
- Chap 09Document26 pagesChap 09Joshua TellvikNo ratings yet
- Spink A., Jansen B. J. - Web Search. Public Searching On The Web (2004) (1st Edition)Document204 pagesSpink A., Jansen B. J. - Web Search. Public Searching On The Web (2004) (1st Edition)Anonymous idBsC1No ratings yet
- Data Structures in Embedded SystemsDocument12 pagesData Structures in Embedded SystemsShankar Sridhar0% (1)
- OFDMADocument29 pagesOFDMAterryNo ratings yet
- Applications of Rapid PrototypingDocument13 pagesApplications of Rapid PrototypingM.Saravana Kumar..M.ENo ratings yet
- Activity 7-Case Structure in LabVIEWDocument8 pagesActivity 7-Case Structure in LabVIEWALlan ABiangNo ratings yet
- Juniper Secure PulseDocument28 pagesJuniper Secure PulsesussusinhaNo ratings yet
- As 9102 FormsDocument4 pagesAs 9102 Formsmedi38No ratings yet
- Shimul ResumeDocument3 pagesShimul ResumeMunzurul kaderNo ratings yet
- 12th Computer Science 1 Mark Questions emDocument135 pages12th Computer Science 1 Mark Questions emsathiyaNo ratings yet
- Techniques of Integration Thomas FinneyDocument6 pagesTechniques of Integration Thomas FinneyVineet TannaNo ratings yet
- SM Ewap (D) Ewwd (L) Erap Ewtp 2005 RuDocument488 pagesSM Ewap (D) Ewwd (L) Erap Ewtp 2005 RushapNo ratings yet