You might also like
- How To Adjust Parameter LBMC GUI User Manual V1.2Document3 pagesHow To Adjust Parameter LBMC GUI User Manual V1.2captainNo ratings yet
- Ky02s Mam100Document19 pagesKy02s Mam100Viorel Ovidiu Stegaru0% (1)
- EM150-2 & EM200-2 Controller Self-Learning GuideDocument3 pagesEM150-2 & EM200-2 Controller Self-Learning GuideThanh Son NguyenNo ratings yet
- GPS Vehicle Tracker User ManualDocument20 pagesGPS Vehicle Tracker User ManualDanang Irawan0% (1)
- IP5305 Datasheet v1.0 - enDocument13 pagesIP5305 Datasheet v1.0 - enKevin Yang YangNo ratings yet
- DC BRUSHLESS DRIVER BLDC-5015A manualDocument5 pagesDC BRUSHLESS DRIVER BLDC-5015A manualroozbehxoxNo ratings yet
- Dzb200 SeriesDocument54 pagesDzb200 SeriesAkos Pocik100% (1)
- TS-V6W 3G GPS Vehicle Tracker 2017Document8 pagesTS-V6W 3G GPS Vehicle Tracker 2017zelalem100% (1)
- APT Communications Protocol PDFDocument368 pagesAPT Communications Protocol PDFIsrael Zamarripa RamírezNo ratings yet
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajNo ratings yet
- Cmba-4 ManualDocument34 pagesCmba-4 Manualselçuk avcı100% (1)
- For Safe Operation: Description of Error DetectedDocument1 pageFor Safe Operation: Description of Error DetectedAmjad HossenNo ratings yet
- CNC Cutting ControllerDocument31 pagesCNC Cutting Controlleruripss100% (1)
- LCD-SW900 INSTRUCTIONS GUIDEDocument6 pagesLCD-SW900 INSTRUCTIONS GUIDEsonda100% (2)
- Nmodbus Api Manual v1.2 en PDFDocument35 pagesNmodbus Api Manual v1.2 en PDFranevesNo ratings yet
- KnCMiner User Manual 1.1Document7 pagesKnCMiner User Manual 1.1joefromdaytonNo ratings yet
- User Manual of NK105 G2 Handle Controller RicocncDocument89 pagesUser Manual of NK105 G2 Handle Controller RicocncHertzog BurgerNo ratings yet
- ModbusEZ V15 ManualDocument6 pagesModbusEZ V15 ManualИоан КрестительNo ratings yet
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyNo ratings yet
- Outseal PLC Shield UNODocument1 pageOutseal PLC Shield UNODadang Ibnu SetyawanNo ratings yet
- Fuling Inverter ManualDocument47 pagesFuling Inverter ManualVictor Bravo100% (1)
- Setup your PC for debugging electric vehicle softwareDocument2 pagesSetup your PC for debugging electric vehicle softwareСергей КаревNo ratings yet
- WWW Cryptominerbros Com Product Bitmain Antminer l7 9 5gh SDocument8 pagesWWW Cryptominerbros Com Product Bitmain Antminer l7 9 5gh ScryptominerbrosNo ratings yet
- Water Cooled Chiller ManualDocument52 pagesWater Cooled Chiller Manualkhamsone pengmanivongNo ratings yet
- ES Series Hardware Manual170413Document64 pagesES Series Hardware Manual170413Oscar MontañezNo ratings yet
- Tutorial GPS DomeDocument11 pagesTutorial GPS DomeAssur AlNo ratings yet
- CNCmakers-EP100 B QuickGuide-EN - EP100Document14 pagesCNCmakers-EP100 B QuickGuide-EN - EP100Angelica PeñarandaNo ratings yet
- Heidenhain TNC 151 BQ Conversational ProgrammingDocument371 pagesHeidenhain TNC 151 BQ Conversational ProgrammingFranGiga100% (1)
- NVRinstallationguideDocument17 pagesNVRinstallationguidegodmaatyNo ratings yet
- Arduino L298N Motor Shield GuideDocument6 pagesArduino L298N Motor Shield GuideLucaDelbarba100% (1)
- Controller Error Solutions ENG V1.2Document10 pagesController Error Solutions ENG V1.2Aditia FajarNo ratings yet
- NewkerDocument161 pagesNewkerTrần ChiếnNo ratings yet
- Panasonic NN Cs596a NN Cs596sDocument64 pagesPanasonic NN Cs596a NN Cs596sAsrulNo ratings yet
- VLT Automation Drive FC 360 PDFDocument16 pagesVLT Automation Drive FC 360 PDFMinh NguyễnNo ratings yet
- AWC 708C Manual PDFDocument33 pagesAWC 708C Manual PDFMrDomDomNo ratings yet
- Danfoss TLXDocument106 pagesDanfoss TLXAndré Couto0% (1)
- Gen4 Application Note: Title Filename Date of Creation Last Updated RevisionDocument13 pagesGen4 Application Note: Title Filename Date of Creation Last Updated RevisiondmaslachNo ratings yet
- BMS 40a 3S - SGTDocument2 pagesBMS 40a 3S - SGTMarcelo MannettNo ratings yet
- Official ManualDocument62 pagesOfficial ManualOsama Kamel ElghitanyNo ratings yet
- Euchner Encoder PDFDocument2 pagesEuchner Encoder PDFTimNo ratings yet
- CNC FTP server software setupDocument25 pagesCNC FTP server software setupPham LongNo ratings yet
- Hardware Used - Power Supply and MicrocontrollerDocument46 pagesHardware Used - Power Supply and MicrocontrollerRocky SinghNo ratings yet
- Installation - Instruction 17mb95s-1 PDFDocument4 pagesInstallation - Instruction 17mb95s-1 PDFzokiNo ratings yet
- Westinghouse Ds 416 PDFDocument28 pagesWestinghouse Ds 416 PDFLuiz_F_A_ViannaNo ratings yet
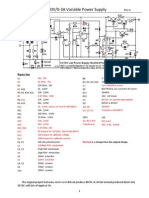
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- TB6560 3-Axis Driver GuideDocument9 pagesTB6560 3-Axis Driver Guidejulio cesar rosales mendezNo ratings yet
- Changzhou Wantai Electrical Appliance Co., LTD: Product FeaturesDocument10 pagesChangzhou Wantai Electrical Appliance Co., LTD: Product FeaturesMarcos AndréNo ratings yet
- HY-TB3DV-N 3 Axis Driver Board ManualDocument10 pagesHY-TB3DV-N 3 Axis Driver Board Manualafricano333No ratings yet
- HY-TB3DV-M 3axis Driver PDFDocument10 pagesHY-TB3DV-M 3axis Driver PDFjoelgcrNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument10 pages3 Axis TB6560 CNC Driver Board Users ManualSibiagny Villegas ArroyoNo ratings yet
- HY-TB4DV-N 4 Axis Driver Board ManualDocument11 pagesHY-TB4DV-N 4 Axis Driver Board Manualafricano333No ratings yet
- TB6560 Mach3 CNC Stepper Motor Controller Operation InstructionDocument19 pagesTB6560 Mach3 CNC Stepper Motor Controller Operation InstructionCornel BordeiNo ratings yet
- TB6560 3axis DriverDocument11 pagesTB6560 3axis DriverPHQ1910No ratings yet
- TB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionDocument18 pagesTB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionAdelNo ratings yet
- User Guide for 5 axis TB6560 driver boardDocument14 pagesUser Guide for 5 axis TB6560 driver boardAli Asghar MuzzaffarNo ratings yet
- HY-TB4DV-M 4axis DriverDocument14 pagesHY-TB4DV-M 4axis DriverJeferson SalazarNo ratings yet
- Mechatronics: 3 and 4 Axis Micro Stepper Motor Driver DatasheetDocument12 pagesMechatronics: 3 and 4 Axis Micro Stepper Motor Driver Datasheetedgar zambranoNo ratings yet
- HY-JK02-M 5-Axis Interface Board ManualDocument11 pagesHY-JK02-M 5-Axis Interface Board ManualMarcos AndréNo ratings yet
- User Manual 5 Axis Breakout BoardDocument10 pagesUser Manual 5 Axis Breakout BoardDavid FernandezNo ratings yet
- SAVEBASE5-axis CNC Breakout Board Setup GuideDocument10 pagesSAVEBASE5-axis CNC Breakout Board Setup GuideSonia SantamaríaNo ratings yet
- Fanuc Alarm PDFDocument72 pagesFanuc Alarm PDFcardoso5286% (7)
- Irt WP12 230 PDFDocument2 pagesIrt WP12 230 PDFNisar AhmedNo ratings yet
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocument635 pagesA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedNo ratings yet
- Inverter precautions and operation guideDocument124 pagesInverter precautions and operation guideagarcos100% (1)
- RS-422 Splitter PDFDocument1 pageRS-422 Splitter PDFNisar AhmedNo ratings yet
- Multimeter connection diagrams and usage guideDocument1 pageMultimeter connection diagrams and usage guideNisar AhmedNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- Dfi Sd631 q170 Atx DatasheetDocument2 pagesDfi Sd631 q170 Atx DatasheetNisar Ahmed0% (1)
- O359h MilDocument90 pagesO359h MilNisar AhmedNo ratings yet
- HeatingDocument10 pagesHeatingNisar AhmedNo ratings yet
- Irt WP12 230 PDFDocument2 pagesIrt WP12 230 PDFNisar AhmedNo ratings yet
- PDFDocument24 pagesPDFNisar AhmedNo ratings yet
- Thermal (Overload) Motor Relay ProtectionDocument8 pagesThermal (Overload) Motor Relay ProtectionNisar AhmedNo ratings yet
- Fundamentals of CNC MachiningDocument256 pagesFundamentals of CNC Machiningdig_it100% (1)
- PDFDocument24 pagesPDFNisar AhmedNo ratings yet
- C (161 194)Document34 pagesC (161 194)Nisar AhmedNo ratings yet
- h7cx Aud1 NDocument64 pagesh7cx Aud1 NNisar AhmedNo ratings yet
- Bartelt Solutions ManualDocument63 pagesBartelt Solutions ManualInnocent PersonNo ratings yet
- Dav-Xxx IngDocument1 pageDav-Xxx IngNisar AhmedNo ratings yet
- Functions of An Variable Frequency Drive VFD 1Document12 pagesFunctions of An Variable Frequency Drive VFD 1Angelo FranklinNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- Multimeter connection diagrams and usage guideDocument1 pageMultimeter connection diagrams and usage guideNisar AhmedNo ratings yet
- Rs-422 Splitter Circuit DiagramDocument1 pageRs-422 Splitter Circuit DiagramNisar AhmedNo ratings yet
- Functions of An Variable Frequency Drive VFD 1Document12 pagesFunctions of An Variable Frequency Drive VFD 1Angelo FranklinNo ratings yet
- HV350 Mini Frequency Inverter Product DescriptionDocument5 pagesHV350 Mini Frequency Inverter Product DescriptionNisar AhmedNo ratings yet
- Standard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesDocument9 pagesStandard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesNisar AhmedNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- HV350 Mini Frequency Inverter Product DescriptionDocument5 pagesHV350 Mini Frequency Inverter Product DescriptionNisar AhmedNo ratings yet
- Irt WP12 230 PDFDocument2 pagesIrt WP12 230 PDFNisar AhmedNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- New Office ShredderDocument2 pagesNew Office ShredderR Lilianitha SiboNo ratings yet
- Mutoh PhotoPrintDX10 SpectoVue ProfilingDocument12 pagesMutoh PhotoPrintDX10 SpectoVue ProfilingДенис ЛобачевскийNo ratings yet
- Spark 2000 Ul: Instruction ManualDocument65 pagesSpark 2000 Ul: Instruction ManualMárcio Fernandes0% (1)
- ECE 124 Week 7 ReviewDocument55 pagesECE 124 Week 7 Reviewjahnavi thotaNo ratings yet
- The Unified Kill ChainDocument19 pagesThe Unified Kill ChainManuNo ratings yet
- MP and MC Lab Solution ManualDocument48 pagesMP and MC Lab Solution ManualsukeerthNo ratings yet
- Thermo Scientific Ramsey Oretronic III: Tramp Metal DetectorDocument2 pagesThermo Scientific Ramsey Oretronic III: Tramp Metal Detectorm2dajNo ratings yet
- Mak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringDocument12 pagesMak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringALPERENNo ratings yet
- Structure Charts: Agenda: - Use of Structure Charts - Symbols - How To CreateDocument12 pagesStructure Charts: Agenda: - Use of Structure Charts - Symbols - How To CreateSujata RoyNo ratings yet
- K1810-13 Sigma A-XT BrochureDocument2 pagesK1810-13 Sigma A-XT BrochureShayan IrevaniNo ratings yet
- Accurately Size NetApp SAN Storage with NetApp LanamarkDocument2 pagesAccurately Size NetApp SAN Storage with NetApp Lanamarksiwei luoNo ratings yet
- Fine Pitch LED Display Series TV-PH125-YM SpecsDocument1 pageFine Pitch LED Display Series TV-PH125-YM SpecsJUANSOLUSINDONo ratings yet
- MySQL Triggers GuideDocument21 pagesMySQL Triggers Guidesatya prakash singhNo ratings yet
- TMEIC Crane Control IndustryDocument32 pagesTMEIC Crane Control IndustryBoy AlfredoNo ratings yet
- Samsung ML-2850 Series ML-2850D / ML-2851ND Service ManualDocument151 pagesSamsung ML-2850 Series ML-2850D / ML-2851ND Service ManualVicent Selfa Oliver100% (10)
- 3MZ-FE EngineDocument51 pages3MZ-FE Engineelijahcoles1990No ratings yet
- North Riser Down Concise TitleDocument1 pageNorth Riser Down Concise TitleCosphiiiNo ratings yet
- Voyage Planner Installation and Operation Instructions 81339-3-EnDocument32 pagesVoyage Planner Installation and Operation Instructions 81339-3-EnIonutz Ionutz100% (1)
- ICT 34 Data Structures and Analysis of AlgorithmDocument9 pagesICT 34 Data Structures and Analysis of AlgorithmKimondo KingNo ratings yet
- Cryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownDocument26 pagesCryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownHabhaile AsfawNo ratings yet
- SRS SampleDocument31 pagesSRS SampleAbhishek DuttaNo ratings yet
- Mastering IBM I Mcpress 2011 Ed1 PDFDocument953 pagesMastering IBM I Mcpress 2011 Ed1 PDFLuis Panao100% (5)
- Vishwakarma Institute E&TC curriculumDocument37 pagesVishwakarma Institute E&TC curriculumAbhijeet KadamNo ratings yet
- Vehicle Running Account (Vra) December 2022 RCCKDocument12 pagesVehicle Running Account (Vra) December 2022 RCCKm.fadhlyaugustami fadhlyNo ratings yet
- L OCALdb EXTRACTDocument37 pagesL OCALdb EXTRACTMohiuddin BabanbhaiNo ratings yet
- Ppap Worksheet (GM 1411) : S Master Status: Lab StatusDocument6 pagesPpap Worksheet (GM 1411) : S Master Status: Lab Statuscong daNo ratings yet
- Gxv3140 Usermanual EnglishDocument151 pagesGxv3140 Usermanual Englishindio007No ratings yet
- LNG Marine Loading Arms and Manifold Draining Purging and Disconnection ProcedureDocument16 pagesLNG Marine Loading Arms and Manifold Draining Purging and Disconnection ProceduresimaismaNo ratings yet
- Leica Geosystems TPS Comparison Chart 1120 en LRDocument1 pageLeica Geosystems TPS Comparison Chart 1120 en LRChristian Guillmar Huanca OscoNo ratings yet
- Selenium Suresh V004Document139 pagesSelenium Suresh V004tester mahesh25No ratings yet