You might also like
- Unidad 2Document28 pagesUnidad 2Mario VasquezNo ratings yet
- Mpaalb Icann16Document8 pagesMpaalb Icann16fbxurumelaNo ratings yet
- Danksharding MathDocument9 pagesDanksharding MathLeon HibnikNo ratings yet
- Extreme Gradient Boosting For Identifying Individual Users Across Different Digital DevicesDocument12 pagesExtreme Gradient Boosting For Identifying Individual Users Across Different Digital DeviceshnavastNo ratings yet
- Imecc UnicampDocument14 pagesImecc UnicampShubha KandelNo ratings yet
- Proceedings of The National Institute For Mathematical Sciences Vol. 2, No. 10 (2008), pp.000-000Document6 pagesProceedings of The National Institute For Mathematical Sciences Vol. 2, No. 10 (2008), pp.000-000Luca BallestraNo ratings yet
- Dynopt - Dynamic Optimisation Code For Matlab: Fikar/research/dynopt/dynopt - HTMDocument12 pagesDynopt - Dynamic Optimisation Code For Matlab: Fikar/research/dynopt/dynopt - HTMdhavalakkNo ratings yet
- Speeding Up Feature Selection by Using An Information Theoretic BoundDocument8 pagesSpeeding Up Feature Selection by Using An Information Theoretic BoundelakadiNo ratings yet
- Approximate Dynamic Programming by Practical ExamplesDocument35 pagesApproximate Dynamic Programming by Practical ExamplesLeonardo DanielliNo ratings yet
- Ec8352-Signals and SystemsDocument13 pagesEc8352-Signals and Systemsazhagank28062003No ratings yet
- Second Set of Slides Notes PDFDocument23 pagesSecond Set of Slides Notes PDFJustina MweendiNo ratings yet
- Pde PDFDocument5 pagesPde PDFAlex Cruz CabreraNo ratings yet
- Marc Hoffmann, Mauricio Labadie, Charles-Albert Lehalle, Gilles Pag' Es, Huy en Pham and Mathieu RosenbaumDocument10 pagesMarc Hoffmann, Mauricio Labadie, Charles-Albert Lehalle, Gilles Pag' Es, Huy en Pham and Mathieu Rosenbaumdheeraj8rNo ratings yet
- Ec3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Document41 pagesEc3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Music LoverNo ratings yet
- Lect Notes 1Document91 pagesLect Notes 1Edinho BordinNo ratings yet
- Neural Network Time SeriesDocument42 pagesNeural Network Time SeriesboynaduaNo ratings yet
- Some Fixed Point Theorems For Expansion Mappings: A.S.Saluja, Alkesh Kumar Dhakde Devkrishna MagardeDocument7 pagesSome Fixed Point Theorems For Expansion Mappings: A.S.Saluja, Alkesh Kumar Dhakde Devkrishna MagardeInternational Journal of computational Engineering research (IJCER)No ratings yet
- SmoothingDocument9 pagesSmoothingmimiNo ratings yet
- A Technique For Generating Relaxed Metrics by Means of Indistinguishability OperatorsDocument10 pagesA Technique For Generating Relaxed Metrics by Means of Indistinguishability OperatorsCarlos Rueda ArmengotNo ratings yet
- Dynopt - Dynamic Optimisation Code ForDocument12 pagesDynopt - Dynamic Optimisation Code ForVyta AdeliaNo ratings yet
- Analyzing The Performance of Mutation Operators To Solve The Travelling Salesman ProblemDocument18 pagesAnalyzing The Performance of Mutation Operators To Solve The Travelling Salesman Problemcranckcracker123No ratings yet
- Andersson Djehiche - AMO 2011Document16 pagesAndersson Djehiche - AMO 2011artemischen0606No ratings yet
- Maquin STA 09Document28 pagesMaquin STA 09p26q8p8xvrNo ratings yet
- Sam HW2Document4 pagesSam HW2Ali HassanNo ratings yet
- Introduction To Reliability Theory (Part 2) : Frank CoolenDocument21 pagesIntroduction To Reliability Theory (Part 2) : Frank CoolenRuth SandalaNo ratings yet
- Balke Ma 1990Document10 pagesBalke Ma 1990Btari ArsytaNo ratings yet
- Mafi 12228Document28 pagesMafi 12228mnpxzdsqs8No ratings yet
- Slides Mme2010 LL FP Revised100706Document10 pagesSlides Mme2010 LL FP Revised100706lukaslNo ratings yet
- ECE438 - Laboratory 2: Discrete-Time SystemsDocument6 pagesECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNo ratings yet
- CS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Document8 pagesCS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Achuthan SekarNo ratings yet
- Inverse Optimal Control:: What Do We Optimize?Document17 pagesInverse Optimal Control:: What Do We Optimize?Akustika HorozNo ratings yet
- Ps 1Document5 pagesPs 1Rahul AgarwalNo ratings yet
- Comparisons of Central Force Optimization and Gravitational Search AlgorithmDocument3 pagesComparisons of Central Force Optimization and Gravitational Search AlgorithmAbdelrahman AlmassryNo ratings yet
- Anirban CMI StatFin 2019 IDocument78 pagesAnirban CMI StatFin 2019 IPraveen KumarNo ratings yet
- QBUS2820 Mid-Semester 2015s2 (Solution)Document7 pagesQBUS2820 Mid-Semester 2015s2 (Solution)EricaNo ratings yet
- CS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Document8 pagesCS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)patrickNo ratings yet
- Optimization and Statistical Methods For High Frequency FinanceDocument11 pagesOptimization and Statistical Methods For High Frequency FinanceUlises ArayaNo ratings yet
- Duffie, Stanton (1992) - Pricing Continuously Resettled Contingent ClaimsDocument13 pagesDuffie, Stanton (1992) - Pricing Continuously Resettled Contingent ClaimsAntonios SangvinatsosNo ratings yet
- Dornbsuh Model ExerciceDocument4 pagesDornbsuh Model Exerciceyouzy rkNo ratings yet
- R SimDiffProcDocument25 pagesR SimDiffProcschalteggerNo ratings yet
- Guide PDFDocument8 pagesGuide PDFJoab Dan Valdivia CoriaNo ratings yet
- EE675A Lecture 16Document6 pagesEE675A Lecture 16sachin bhadangNo ratings yet
- Opt Switch CDC 04Document6 pagesOpt Switch CDC 04menilanjan89nLNo ratings yet
- A User's Guide To Solving Real Business Cycle ModelsDocument18 pagesA User's Guide To Solving Real Business Cycle Modelssamir880No ratings yet
- Martins-FilhoToreroYao2010 7Document12 pagesMartins-FilhoToreroYao2010 7Jose LopezNo ratings yet
- NeurIPS 2022 Efficient Methods For Non Stationary Online Learning Paper ConferenceDocument13 pagesNeurIPS 2022 Efficient Methods For Non Stationary Online Learning Paper Conferenceancilla chimombeNo ratings yet
- Some Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesDocument10 pagesSome Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesJORGE ELIECER HERNANDEZ HERNANDEZNo ratings yet
- CS 229, Summer 2020 Problem Set #1Document14 pagesCS 229, Summer 2020 Problem Set #1nhungNo ratings yet
- Applications of DerivativesDocument4 pagesApplications of DerivativesSharaine CastilloNo ratings yet
- Parameter Estimation of Switching SystemsDocument11 pagesParameter Estimation of Switching SystemsJosé RagotNo ratings yet
- Problem Set 8Document5 pagesProblem Set 8clouds lauNo ratings yet
- Team 22Document5 pagesTeam 22api-422839082No ratings yet
- Modelling and Analysis of Degradation DaDocument46 pagesModelling and Analysis of Degradation DaramarunachalamNo ratings yet
- Direct GBQ Algorithm For Solving Mixed Trigonometric Polynomial SystemsDocument10 pagesDirect GBQ Algorithm For Solving Mixed Trigonometric Polynomial SystemsДаринка ЗечевићNo ratings yet
- On The Joint Distribution of The Surplus Immediately Prior To Ruin and The Deficit at RuinDocument5 pagesOn The Joint Distribution of The Surplus Immediately Prior To Ruin and The Deficit at RuinramziNo ratings yet
- Guided Tour On VAR Innovation Response AnalysisDocument45 pagesGuided Tour On VAR Innovation Response AnalysisrunawayyyNo ratings yet
- April 27, 2006 10:13 Book Trim Size For 9in X 6in FieldDocument10 pagesApril 27, 2006 10:13 Book Trim Size For 9in X 6in FieldShridhar MathadNo ratings yet
- Taller 3 (A. NG.) - Introducción Al Aprendizaje SupervisadoDocument8 pagesTaller 3 (A. NG.) - Introducción Al Aprendizaje SupervisadoangieNo ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- 2022 Routledge Handbook of Immigration and Refugee Studies (Triandafyllidou, Ed.)Document499 pages2022 Routledge Handbook of Immigration and Refugee Studies (Triandafyllidou, Ed.)aguirrej4370No ratings yet
- LSPR CC05 s26Document26 pagesLSPR CC05 s26elearninglsprNo ratings yet
- Organizational Learning Capability (1998)Document230 pagesOrganizational Learning Capability (1998)Sara Kožić100% (1)
- Research FinalDocument47 pagesResearch FinalMAÑIBO, CLARK DEVON M.No ratings yet
- Creating A Leadership Development ProgramDocument15 pagesCreating A Leadership Development ProgramLeonardo AlvarengaNo ratings yet
- Case Study Research DesignDocument12 pagesCase Study Research DesignOrsua Janine AprilNo ratings yet
- Sikdar Mukopadhyay 2016Document21 pagesSikdar Mukopadhyay 2016Rumi AzimNo ratings yet
- Courtyard As Passive Design Solution For School Bldgs in Hot AreaDocument10 pagesCourtyard As Passive Design Solution For School Bldgs in Hot AreaCham LedesmaNo ratings yet
- NIST SP800-30 Approach To Risk AssessmentDocument6 pagesNIST SP800-30 Approach To Risk AssessmentBabby BossNo ratings yet
- Semester Project: COMSATS University Islamabad, Virtual Campus HUM102 - Report Writing Skills Assignment # 03 Fall 2021Document4 pagesSemester Project: COMSATS University Islamabad, Virtual Campus HUM102 - Report Writing Skills Assignment # 03 Fall 2021Ahad buttNo ratings yet
- Parental Involvementand AcademicDocument6 pagesParental Involvementand AcademicjustineNo ratings yet
- NIADocument9 pagesNIAEric HexumNo ratings yet
- Business English For PresentationDocument24 pagesBusiness English For PresentationRisal Fadhil RahardiansyahNo ratings yet
- As 91435Document3 pagesAs 91435api-271057641No ratings yet
- Pfmea For Small Scale IndustriesDocument4 pagesPfmea For Small Scale IndustriesshivkeshNo ratings yet
- Lesson Proforma - HealthDocument4 pagesLesson Proforma - Healthapi-375733722No ratings yet
- Prevalensi MalocclusionDocument5 pagesPrevalensi MalocclusionIdelia GunawanNo ratings yet
- A Research Submitted To: Student ResearchersDocument4 pagesA Research Submitted To: Student ResearchersDorothy Ann AllurinNo ratings yet
- Similar To Me EffectDocument3 pagesSimilar To Me EffectLisha ShammyNo ratings yet
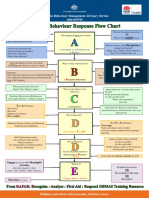
- Behaviour Response Flow Chart 5 Nov 2012Document1 pageBehaviour Response Flow Chart 5 Nov 2012jakilaNo ratings yet
- HR Analyst Cover LetterDocument7 pagesHR Analyst Cover Lettervofysyv1z1v3No ratings yet
- Ciulla1995-Leadership Ethic (Mapping The Territory)Document25 pagesCiulla1995-Leadership Ethic (Mapping The Territory)Muhammad Halim Triwirani SyamNo ratings yet
- Role of Ngos in Rural Development in IndiaDocument18 pagesRole of Ngos in Rural Development in IndiaOmkkarNo ratings yet
- Mahindra Bolero - RM FinalDocument38 pagesMahindra Bolero - RM FinalanuragkamNo ratings yet
- Mirpur University of Science and Technology (Must), MirpurDocument1 pageMirpur University of Science and Technology (Must), MirpurAmmar Yaqoob MughalNo ratings yet
- Week 1 - Introduction To Statistics PDFDocument34 pagesWeek 1 - Introduction To Statistics PDFAnonymous TykoQpqWwNo ratings yet
- Rics - Presentation PDFDocument39 pagesRics - Presentation PDFrthomsanNo ratings yet
- Human Reliability Assessment Theory and Practice - Anthony J. SpurginDocument300 pagesHuman Reliability Assessment Theory and Practice - Anthony J. Spurgingmitsuta100% (1)
- Image Forgery Detection Using Adaptive Oversegmentation and Feature Point MatchingDocument5 pagesImage Forgery Detection Using Adaptive Oversegmentation and Feature Point MatchingIJARTETNo ratings yet
- TensiNews14 PDFDocument24 pagesTensiNews14 PDFpedrogasparmendoncaNo ratings yet