You might also like
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Sliding Mode Control of A BuckDocument6 pagesSliding Mode Control of A BuckAdvika SharmaNo ratings yet
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocument4 pagesTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNo ratings yet
- Spring K MassDocument4 pagesSpring K MasshamedNo ratings yet
- Detoya Activity3Document17 pagesDetoya Activity3Jay Ian GeronaNo ratings yet
- Non-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesDocument4 pagesNon-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesOka Kurniawan100% (2)
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforDocument7 pagesShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15No ratings yet
- 09 - Chapter 1Document16 pages09 - Chapter 1Shaik KareemullaNo ratings yet
- Electromechanical Modeling and Simulation of Piezoelectric Energy Harvester Using MATLAB SIMULINK-IJAERDVO5IO327564Document8 pagesElectromechanical Modeling and Simulation of Piezoelectric Energy Harvester Using MATLAB SIMULINK-IJAERDVO5IO327564JOSE ALVARO SALAZAR IBARRANo ratings yet
- Random Eletrical TextbookDocument3 pagesRandom Eletrical Textbookenoch tobeNo ratings yet
- 1401-Ab Initio Calculation Iph En-015Document6 pages1401-Ab Initio Calculation Iph En-015majid ghand chiNo ratings yet
- Zen The Path of Paradox Vol 1Document5 pagesZen The Path of Paradox Vol 1Rigved SharmaNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- The Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKODocument3 pagesThe Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKOShashi KumarNo ratings yet
- Analysis and Applications of Laplace /fourier Transformations in Electric CircuitDocument7 pagesAnalysis and Applications of Laplace /fourier Transformations in Electric CircuitSwasti RanjanNo ratings yet
- Exercise 1 (6 Points) Horizontal Mechanical OscillatorDocument6 pagesExercise 1 (6 Points) Horizontal Mechanical OscillatorSerge DemirdjianNo ratings yet
- Exercise 1 (7 Points) Determination of The Stiffness of A SpringDocument6 pagesExercise 1 (7 Points) Determination of The Stiffness of A SpringBashar Al AhmadNo ratings yet
- An Analytic Formula of The Current Distribution For The VLF Horizontal Wire Antenna Above Lossy Half-Space H.-T. Chen, J.-X. Luo, and D.-K. ZhangDocument10 pagesAn Analytic Formula of The Current Distribution For The VLF Horizontal Wire Antenna Above Lossy Half-Space H.-T. Chen, J.-X. Luo, and D.-K. ZhangMilica RancicNo ratings yet
- Permeability Measurement of Ferromagnetic Materials in Microwave Frequency Range Using Support Vector Machine RegressionDocument10 pagesPermeability Measurement of Ferromagnetic Materials in Microwave Frequency Range Using Support Vector Machine Regressionsahil singhNo ratings yet
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranNo ratings yet
- CSRR LwaDocument4 pagesCSRR LwaSaad GulfamNo ratings yet
- Mathematical Aspects of Simulating Efficient RF Operation of HemtsDocument9 pagesMathematical Aspects of Simulating Efficient RF Operation of HemtsGennadiyNo ratings yet
- The Electron Interaction With The Dirac Delta PulseDocument13 pagesThe Electron Interaction With The Dirac Delta PulseGerové InvestmentsNo ratings yet
- An Electrical Impedance Tomography System For Current Pulse MeasurementsDocument3 pagesAn Electrical Impedance Tomography System For Current Pulse MeasurementsYassine AbdessamiaNo ratings yet
- Mishonov 2021Document9 pagesMishonov 2021Juan MendezNo ratings yet
- AFLDocument4 pagesAFLoadipphone7031No ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- Matlab RC e RLDocument5 pagesMatlab RC e RLludokellypNo ratings yet
- Analysis of Transformer Vibration Signal: Keqi MaDocument6 pagesAnalysis of Transformer Vibration Signal: Keqi MaAHMED ALSHAMMARINo ratings yet
- (13358871 - Measurement Science Review) Protection of HF Transmitters From Reflection Failure by Help of Semiconductor IsolatorsDocument5 pages(13358871 - Measurement Science Review) Protection of HF Transmitters From Reflection Failure by Help of Semiconductor IsolatorsYunus özdenerNo ratings yet
- Laplace Transforms and Its ApplicationsDocument4 pagesLaplace Transforms and Its ApplicationsAhmed S. El-MoghazyNo ratings yet
- Mathematical Modeling of Power DC/DC: ConvertersDocument6 pagesMathematical Modeling of Power DC/DC: ConvertersStudents Xerox ChidambaramNo ratings yet
- Gonzales ResearchWorkNo.1 EST7LDocument15 pagesGonzales ResearchWorkNo.1 EST7LRainNo ratings yet
- JEE Advanced 2016 Physics Question Paper-2Document40 pagesJEE Advanced 2016 Physics Question Paper-2VaNo ratings yet
- Multifunctional SensorDocument25 pagesMultifunctional SensorOrazio GarofaloNo ratings yet
- Calculation of Losses PDFDocument9 pagesCalculation of Losses PDFAhmed H. HassanNo ratings yet
- Q4-Another FormDocument63 pagesQ4-Another Form谢钊洋No ratings yet
- IsingDocument17 pagesIsingSyarifatul UlfaNo ratings yet
- Detailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksDocument6 pagesDetailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksTransformadores Eléctricos - Omar BarbosaNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Power Amplifier Modeling and Power Amplifier Predistortion in Ofdm SystemDocument10 pagesPower Amplifier Modeling and Power Amplifier Predistortion in Ofdm Systemtiblue.black.36No ratings yet
- Slua671 Compensation Design With TL431 For UCC28600Document13 pagesSlua671 Compensation Design With TL431 For UCC28600Phạm Văn Tưởng100% (1)
- MITRES 6-010S13 Chap03 PDFDocument47 pagesMITRES 6-010S13 Chap03 PDFSrinyantu ChatterjeeNo ratings yet
- ComplDyn Simplex OEODocument5 pagesComplDyn Simplex OEORené Mboyo KouayepNo ratings yet
- PHYS3002 Lab Report - Thermal Fluctuations of QR - 21482629 - 2 PDFDocument5 pagesPHYS3002 Lab Report - Thermal Fluctuations of QR - 21482629 - 2 PDFIgnasius Krisnanta SetiaputraNo ratings yet
- Belcher-Feynman Cylinder ParadoxDocument9 pagesBelcher-Feynman Cylinder ParadoxH LNo ratings yet
- Classical ElectrodynamicsDocument22 pagesClassical ElectrodynamicsAkshay kumarNo ratings yet
- Mechanically Steerable Antennas Using Dielectric Phase ShiftersDocument4 pagesMechanically Steerable Antennas Using Dielectric Phase Shifterstimeo hphaseswNo ratings yet
- Comparison Between Linear Electromagnetic Accelerators: T. Siaenen and M.J. L OfflerDocument3 pagesComparison Between Linear Electromagnetic Accelerators: T. Siaenen and M.J. L OfflerAlex Gosselin PronovostNo ratings yet
- Electronics 09 01748Document15 pagesElectronics 09 01748ihab benayacheNo ratings yet
- EMTP Modelling of Grounding Electrodes PDFDocument4 pagesEMTP Modelling of Grounding Electrodes PDFCesar ZamudioNo ratings yet
- Reiche 2002 0391Document19 pagesReiche 2002 0391Particle Beam Physics LabNo ratings yet
- Chapter2 SummaryDocument38 pagesChapter2 Summaryac100% (1)
- Folha 2 (5.)Document7 pagesFolha 2 (5.)Joao FernandesNo ratings yet
- Problem 1: Radiative Decay in Two Dimensions: EE 231, Lasers Spring 2007 Problem Set 3 Due 5PM 2 MayDocument2 pagesProblem 1: Radiative Decay in Two Dimensions: EE 231, Lasers Spring 2007 Problem Set 3 Due 5PM 2 MayHusam Abduldaem MohammedNo ratings yet
- E (JL-L'LDocument2 pagesE (JL-L'LNilesh NagraleNo ratings yet
- NTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - ConvertersDocument5 pagesNTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - Convertersbhargav nagarajuNo ratings yet
- ECE451 Lab 06Document5 pagesECE451 Lab 06Nabil DakhliNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- Math Lesson Plan G7 Term 2 (2021-2022)Document8 pagesMath Lesson Plan G7 Term 2 (2021-2022)Luh Pertiwi PutriNo ratings yet
- Pradip 33333Document9 pagesPradip 33333Anil acharyaNo ratings yet
- Cavity Relief in Ball ValvesDocument5 pagesCavity Relief in Ball Valvessuthandira.malarNo ratings yet
- Lecture 1Document25 pagesLecture 1Mohieddine FaridNo ratings yet
- Data Sheet 6ES7221-1BF30-0XB0: General InformationDocument3 pagesData Sheet 6ES7221-1BF30-0XB0: General InformationGaber3No ratings yet
- 2020 06 종로해설Document6 pages2020 06 종로해설Bourne JeyNo ratings yet
- Case B NotesDocument4 pagesCase B Notescarolinepei1230No ratings yet
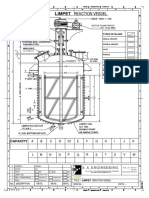
- Limpet Reaction Vessel PDFDocument1 pageLimpet Reaction Vessel PDFarajamani78No ratings yet
- ZVEI Industrie 40 Component EnglishDocument2 pagesZVEI Industrie 40 Component EnglishAllagui AmalNo ratings yet
- Design of A Transmitter For Ultra Wideband Radio - Matlab ProjectsDocument12 pagesDesign of A Transmitter For Ultra Wideband Radio - Matlab ProjectsAhmed AbubakrNo ratings yet
- Assignment 3 (SEE 312) : Part ADocument3 pagesAssignment 3 (SEE 312) : Part ANaveen SrivastavaNo ratings yet
- Asset Tracking For Physical Goods For Agromall Strategy DocumentDocument11 pagesAsset Tracking For Physical Goods For Agromall Strategy DocumentAderayo OnipedeNo ratings yet
- Vacuum Tube Substitutions Inexpensive Tube Power Supply Grid-Leak Detectors Regenerative Receiver & MorelDocument52 pagesVacuum Tube Substitutions Inexpensive Tube Power Supply Grid-Leak Detectors Regenerative Receiver & Morelbenra1100% (1)
- Project Report On Food Waste Management SystemDocument47 pagesProject Report On Food Waste Management SystemUmme HaniNo ratings yet
- Prospekt - SCROLL - ENG RENNERDocument8 pagesProspekt - SCROLL - ENG RENNERAriantoNo ratings yet
- Dräger X-Am® 5000 Technical ManualDocument72 pagesDräger X-Am® 5000 Technical Manualirsya894027No ratings yet
- Elective Courses List For Epgp-14 BatchDocument7 pagesElective Courses List For Epgp-14 BatchAbirami NarayananNo ratings yet
- NCCS 2019 1024Document5 pagesNCCS 2019 1024saju_s_rajNo ratings yet
- State Board of Cricket Council - Requirement Document 5Document10 pagesState Board of Cricket Council - Requirement Document 5meet gohilNo ratings yet
- List MO 1-19 Jan 2022Document246 pagesList MO 1-19 Jan 2022Rajiman esNo ratings yet
- Sop Handtool & Portable ToolDocument14 pagesSop Handtool & Portable ToolArie100% (2)
- Oo LabDocument327 pagesOo Labtamilarasi87thulasiNo ratings yet
- 955i Torque SpecificationsDocument6 pages955i Torque SpecificationsRodney Alan Armarego100% (3)
- Assignment Cover Page Doc Dhaka University 4752 PDFDocument3 pagesAssignment Cover Page Doc Dhaka University 4752 PDFFayyaz KhanNo ratings yet
- TRUMPF Genuine Parts Catalog enDocument116 pagesTRUMPF Genuine Parts Catalog encrazy hackerNo ratings yet
- RateGain AnnualReport FY2021-22Document135 pagesRateGain AnnualReport FY2021-22ATRIUM NEET EXPONo ratings yet
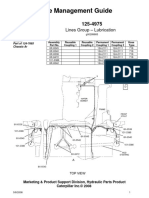
- Hose Management Guide: SN: 4AR Lines Group - LubricationDocument52 pagesHose Management Guide: SN: 4AR Lines Group - LubricationNY DanyNo ratings yet
- Literary Devices Unleashed: Authored by Vicki Davis (@)Document2 pagesLiterary Devices Unleashed: Authored by Vicki Davis (@)zemirah cadaveroNo ratings yet
- G406L Quad CH Video Wall Controller Datasheet V2.02Document7 pagesG406L Quad CH Video Wall Controller Datasheet V2.02Noob Master IndonesiaNo ratings yet
- Toplighting Compact enDocument4 pagesToplighting Compact enUmer Hussain MoverNo ratings yet