You might also like
- Myp Unit 3 PlannerDocument6 pagesMyp Unit 3 PlannerTarique MasoodNo ratings yet
- Cargomax 2.1: User'S ManualDocument197 pagesCargomax 2.1: User'S ManualNicu ScutaruNo ratings yet
- 7zpna4087dDocument226 pages7zpna4087dEXITNo ratings yet
- PCS EpgDocument7 pagesPCS EpgStore ZunnieNo ratings yet
- WMM Mix DesignDocument44 pagesWMM Mix DesignAshok amlapure100% (1)
- User Guide: Siemens PLM SoftwareDocument32 pagesUser Guide: Siemens PLM Softwareabc123go100% (1)
- 3 DBeam ManualDocument114 pages3 DBeam Manualharsh4u100% (1)
- Low Container Ship Speed Facilitated by Versatile ME/ME-C EnginesDocument12 pagesLow Container Ship Speed Facilitated by Versatile ME/ME-C EnginesParthiban NagarajanNo ratings yet
- Conditiion of ClassificationDocument55 pagesConditiion of ClassificationVeeraiah AnbuNo ratings yet
- Automatic Identification SystemDocument7 pagesAutomatic Identification Systemசிம்பு சண்டியர்No ratings yet
- Marine 2017 18 - Propeller Nozzles DesignDocument13 pagesMarine 2017 18 - Propeller Nozzles DesignMaciej ReichelNo ratings yet
- Propulsion Trends in Container VesselsDocument28 pagesPropulsion Trends in Container VesselsFuchsbauNo ratings yet
- 5-MAN Diesel 32-40 Twin Medium Speed EngineDocument218 pages5-MAN Diesel 32-40 Twin Medium Speed Engineİsmail YazıcıNo ratings yet
- MSJ41503 - Intro To Maritime ManagementDocument6 pagesMSJ41503 - Intro To Maritime ManagementkjNo ratings yet
- ABS Rules HSC Part 3e PDFDocument236 pagesABS Rules HSC Part 3e PDFamin100% (2)
- Marflex Deepwell Pump Brochure v3Document7 pagesMarflex Deepwell Pump Brochure v3Stathis MoumousisNo ratings yet
- Waterjet Thesis - Rolls Royce PDFDocument170 pagesWaterjet Thesis - Rolls Royce PDFAmmy singhNo ratings yet
- Read This Manual Carefully Before OperationDocument126 pagesRead This Manual Carefully Before OperationSteven AmadorNo ratings yet
- Stability Criteria (CR)Document175 pagesStability Criteria (CR)georgekc77No ratings yet
- BVS Users Manual 8.6Document205 pagesBVS Users Manual 8.6borzonNo ratings yet
- 2104-Empirical Calculation of Roll Damping For Ships PDFDocument18 pages2104-Empirical Calculation of Roll Damping For Ships PDFDennys RamirezNo ratings yet
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasNo ratings yet
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- Self-Study ProgrammeDocument84 pagesSelf-Study Programmejohnb313100% (1)
- Control and MonitoringDocument2 pagesControl and MonitoringNebojsa Kristof0% (1)
- Fiori & Pratolongo-2021 - The Bahía Blanca EstuaryDocument579 pagesFiori & Pratolongo-2021 - The Bahía Blanca EstuarykevinNo ratings yet
- "Lifting - Lug" - Lifting Lug Analysis: Program DescriptionDocument3 pages"Lifting - Lug" - Lifting Lug Analysis: Program Descriptionnamasral100% (3)
- MSC 85-3-2 Intact Stability Code 2008Document99 pagesMSC 85-3-2 Intact Stability Code 2008Habib SusiloNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- FIFI ChecklistDocument1 pageFIFI ChecklistShady Elshazly100% (2)
- Design Aspects and Applications of Deep-V Hull Forms To High Speed CraftsDocument9 pagesDesign Aspects and Applications of Deep-V Hull Forms To High Speed CraftsAnibal Puchi OpazoNo ratings yet
- Autoship ManualDocument162 pagesAutoship Manualolarewaju AnimasahunNo ratings yet
- Proiect TneispDocument14 pagesProiect TneispSlav Marius MariusNo ratings yet
- E K I PDFDocument7 pagesE K I PDFPrasad SnNo ratings yet
- Propulsion Trends in Tankers (MAN B&W)Document12 pagesPropulsion Trends in Tankers (MAN B&W)sandithnavgathiNo ratings yet
- MEPC 157 (55) Rate of DischargeDocument3 pagesMEPC 157 (55) Rate of Dischargefineeq100% (3)
- Vent SystemDocument5 pagesVent SystemNicu BîlhacNo ratings yet
- Guide For Power PredictionDocument11 pagesGuide For Power PredictionpagliasoNo ratings yet
- VLCC TDC501 319 PDFDocument376 pagesVLCC TDC501 319 PDFJon LopezNo ratings yet
- Propulsion Trends in Container VesselsDocument28 pagesPropulsion Trends in Container VesselsAdrianMictarNo ratings yet
- Optimized Design For TSHDs Swell CompensatorDocument13 pagesOptimized Design For TSHDs Swell CompensatorTomasz FelknerNo ratings yet
- More Than 1500 Installations WorldwideDocument40 pagesMore Than 1500 Installations WorldwideAbhishek KumarNo ratings yet
- Presentation On Hovercraft: Presented byDocument21 pagesPresentation On Hovercraft: Presented byNehaNo ratings yet
- HJ Mechtronic SystemDocument4 pagesHJ Mechtronic SystemSteve BoteNo ratings yet
- Stability-Manual PDFDocument375 pagesStability-Manual PDFLe ChinhNo ratings yet
- Amendments To The Continuous Synopsis Record (CSR) Document No 09 For The Ship WITH IMO NUMBER: IMODocument1 pageAmendments To The Continuous Synopsis Record (CSR) Document No 09 For The Ship WITH IMO NUMBER: IMOamu_more44No ratings yet
- MotorbikeDocument3 pagesMotorbikeRaquel FariaNo ratings yet
- Vapor Emission Control System Manual Usc PDFDocument100 pagesVapor Emission Control System Manual Usc PDFNestor MospanNo ratings yet
- TRAFI 494 131 03 04 01 00 2016 EN Jaaluokkamaarays 2017Document65 pagesTRAFI 494 131 03 04 01 00 2016 EN Jaaluokkamaarays 2017Maxim100% (1)
- BB Aquarius Folding Fin Stabilisers HRDocument2 pagesBB Aquarius Folding Fin Stabilisers HRAnthonyNo ratings yet
- Ballast Water Treatment System PDFDocument57 pagesBallast Water Treatment System PDFSvetoslav StoimenovNo ratings yet
- IMO2008 - MSC267 (85) - 2008 IS Code PDFDocument94 pagesIMO2008 - MSC267 (85) - 2008 IS Code PDFSrikanth ShivramNo ratings yet
- Polylux WebkatalogDocument96 pagesPolylux WebkatalogNesil Abiera50% (2)
- Jva Z18 ManualDocument52 pagesJva Z18 ManualJorge JimenezNo ratings yet
- Chintana Naree BriefDocument11 pagesChintana Naree BriefWinston Rodrigues100% (1)
- M3 5123g 040419Document76 pagesM3 5123g 040419prash28091981100% (1)
- S70me-C8 5Document365 pagesS70me-C8 5Kostas Mournianakis100% (1)
- Model Sea Service Pentru TancuriDocument2 pagesModel Sea Service Pentru TancuriSuperhypoNo ratings yet
- Wartsila 32 Project GuideDocument2 pagesWartsila 32 Project GuideTarek Esmail ElsherifNo ratings yet
- Stability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioDocument31 pagesStability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioLenin ValerioNo ratings yet
- Neves 2006Document31 pagesNeves 2006Janatan ChoiNo ratings yet
- Influence of Damping On The Roll Motion of Ships: Emre Pesman, Deniz Bayraktar and Metin TAYLANDocument8 pagesInfluence of Damping On The Roll Motion of Ships: Emre Pesman, Deniz Bayraktar and Metin TAYLANSabrinaFuschettoNo ratings yet
- Orcaflex Manual: Version 9.5ADocument445 pagesOrcaflex Manual: Version 9.5AWynne LukNo ratings yet
- FPSO Global Final ReportDocument38 pagesFPSO Global Final ReportGeorgeMtyNo ratings yet
- Coupled Dynamic Response of Moored FPSO With RisersDocument8 pagesCoupled Dynamic Response of Moored FPSO With RisersWynne LukNo ratings yet
- Laboratory Observations of Green Water Over Topping A Fixed DeckDocument14 pagesLaboratory Observations of Green Water Over Topping A Fixed DeckWynne LukNo ratings yet
- Super 8 - Movie AnalysisDocument4 pagesSuper 8 - Movie AnalysisBeshoy. BNo ratings yet
- DissertationDocument193 pagesDissertationCARLA VIZARRETA PISSANINo ratings yet
- Literary, Photo Story, OpinionDocument9 pagesLiterary, Photo Story, OpinionMaya BabaoNo ratings yet
- Manager Feedback Survey-GoogleDocument3 pagesManager Feedback Survey-GoogleJorge Pinho da CruzNo ratings yet
- Take Home ExamDocument10 pagesTake Home ExamRaine PiliinNo ratings yet
- Grammar Subject For Elementary - 5th Grade - Coordinating Conjunctions by SlidesgoDocument56 pagesGrammar Subject For Elementary - 5th Grade - Coordinating Conjunctions by SlidesgoAr NitaNo ratings yet
- NT-M2 Wireless Laser Barcode ScannerDocument1 pageNT-M2 Wireless Laser Barcode ScanneradilNo ratings yet
- User Manual Auto-Reclosing ProtectorDocument8 pagesUser Manual Auto-Reclosing ProtectorThiago GusmãoNo ratings yet
- Ultrasonic Probe Assisted Stir Casting Method For Metal Matrix Nano-Composite Manufacturing: An Innovative MethodDocument3 pagesUltrasonic Probe Assisted Stir Casting Method For Metal Matrix Nano-Composite Manufacturing: An Innovative MethodMENo ratings yet
- D6467.1395.CD-Cohesive SoilsDocument7 pagesD6467.1395.CD-Cohesive Soilsvalmorebocanegralond100% (1)
- Driving TRDocument62 pagesDriving TRmary jane garcinesNo ratings yet
- Aldous Huxley Between The Wars - Essays and Letters. - Free Online LibraryDocument4 pagesAldous Huxley Between The Wars - Essays and Letters. - Free Online LibraryHasan ArslanNo ratings yet
- Term-2 Cycle Test Schedule 2023-24Document2 pagesTerm-2 Cycle Test Schedule 2023-24sarassinging22No ratings yet
- Listening TestDocument3 pagesListening TestNatalia García GarcíaNo ratings yet
- Nadia Maharani Eka Suci: Education LevelDocument1 pageNadia Maharani Eka Suci: Education LevelMICHELLE BENEDICTANo ratings yet
- P&S QBDocument4 pagesP&S QBTrigun TejaNo ratings yet
- Lipid Maps Leipzig 2018Document72 pagesLipid Maps Leipzig 2018first name last nameNo ratings yet
- Chase Evan Oliphant BiographyDocument1 pageChase Evan Oliphant Biographyapi-248803155No ratings yet
- Experimental Designs in Sentence Processing Research: A Methodological Review and User's GuideDocument32 pagesExperimental Designs in Sentence Processing Research: A Methodological Review and User's Guidesara1744No ratings yet
- AICTE RulesDocument51 pagesAICTE Rulesrajesh dawarNo ratings yet
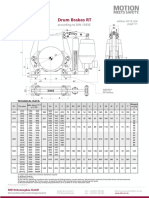
- Drum Brakes RT: According To DIN 15435Document1 pageDrum Brakes RT: According To DIN 15435LukaNo ratings yet
- GE7 NotesDocument2 pagesGE7 NotesR Jay RubioNo ratings yet
- Unit 6 (Photosynthesis) - Worksheet Answer KeyDocument3 pagesUnit 6 (Photosynthesis) - Worksheet Answer Keysadia.klassonNo ratings yet
- Ava de JongeDocument2 pagesAva de Jongeapi-543815662No ratings yet
- Usg 212Document8 pagesUsg 212Martín Sánchez BettiolNo ratings yet