You might also like
- TR Shove Knife InfoDocument1 pageTR Shove Knife InfoAdam Thimmig100% (1)
- Setting Up ShopDocument242 pagesSetting Up ShopFredy Alvarez Lucas100% (15)
- D20 25 30 33S-5 D35C-5 (Sb1109e06) PDFDocument424 pagesD20 25 30 33S-5 D35C-5 (Sb1109e06) PDFGORD100% (8)
- Manual de Servicio Monitor LCD Dell E190SfDocument59 pagesManual de Servicio Monitor LCD Dell E190SfAntonio Chavez100% (1)
- PG42CB00E Rev 001Document191 pagesPG42CB00E Rev 001al100% (1)
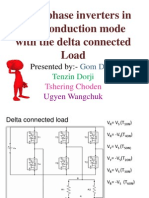
- Three Phase Delta Connected InverterDocument16 pagesThree Phase Delta Connected InverterGomDorji84% (25)
- Mobile Harbour Crane Electrical DiagramsDocument586 pagesMobile Harbour Crane Electrical DiagramsYuzz100% (5)
- Lm317 Regulated Battery Charger Circuit - Electronic CircuitsDocument10 pagesLm317 Regulated Battery Charger Circuit - Electronic CircuitsjoonimNo ratings yet
- Relay: Prepared By: Engr. Irish Jasmine C. Morales, RmeDocument17 pagesRelay: Prepared By: Engr. Irish Jasmine C. Morales, Rmegame masterNo ratings yet
- Variable Speed Drive - IntroductionDocument6 pagesVariable Speed Drive - Introductionawhk2006No ratings yet
- Motor Starter NordDocument36 pagesMotor Starter NordEuojrNo ratings yet
- INSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSDocument59 pagesINSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSMichael HailuNo ratings yet
- Advanced Power Electronics and Microcontrollers For Renewable Energy SystemsDocument39 pagesAdvanced Power Electronics and Microcontrollers For Renewable Energy Systemsbisrat yeshidagnaNo ratings yet
- Transformer in and OutDocument214 pagesTransformer in and Outimcoolmailme2No ratings yet
- ABB ACS880 FirmwareDocument264 pagesABB ACS880 FirmwareKelley TheisenNo ratings yet
- DC To AC Inverter With DSCDocument23 pagesDC To AC Inverter With DSCUsamah FarooquiNo ratings yet
- RelayDocument12 pagesRelaytai58No ratings yet
- Manual Axpert KING PYLONDocument59 pagesManual Axpert KING PYLONEllis BergmanNo ratings yet
- Linear MotionDocument25 pagesLinear MotionMOSC2010No ratings yet
- Relay Circuit PDFDocument8 pagesRelay Circuit PDFGuru Mishra100% (1)
- G120 PM250Document72 pagesG120 PM250stubborn002No ratings yet
- Operation and Application of PLC With Ladder DiagramDocument9 pagesOperation and Application of PLC With Ladder DiagramYuva Raj50% (2)
- RIO600 PG 757487 ENfDocument36 pagesRIO600 PG 757487 ENfZeckrey JikurunNo ratings yet
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDocument13 pagesUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarNo ratings yet
- WestinghouseDocument42 pagesWestinghouseTravis H100% (2)
- Ac Motor Control k2636 - Rev2Document12 pagesAc Motor Control k2636 - Rev2kobiNo ratings yet
- Circuit Breakers Lecture Notes 3Document124 pagesCircuit Breakers Lecture Notes 3Varun NarisettyNo ratings yet
- Inverters for AC Motor Drives: PWM-VSI drivesDocument17 pagesInverters for AC Motor Drives: PWM-VSI drivesAslam SdNo ratings yet
- 13.8 V - 15 A From A PC Power Supply PDFDocument7 pages13.8 V - 15 A From A PC Power Supply PDFcolorado wildernessNo ratings yet
- Motor Control: ApplicationsDocument4 pagesMotor Control: ApplicationsJamesdomingoNo ratings yet
- LORAIN POWER PLANT MICROPROCESSOR CONTROL PANELDocument22 pagesLORAIN POWER PLANT MICROPROCESSOR CONTROL PANELRajesh Sharma100% (1)
- Simple two diode current limiter protects power suppliesDocument2 pagesSimple two diode current limiter protects power suppliesnassimNo ratings yet
- Design and Simulation of Induction HeatingDocument3 pagesDesign and Simulation of Induction HeatingHadi BarakNo ratings yet
- How To Read MCB Nameplate Data Rating Printed On ItDocument3 pagesHow To Read MCB Nameplate Data Rating Printed On Itibrahim shahNo ratings yet
- Construction and Working of Brushless DC PDFDocument12 pagesConstruction and Working of Brushless DC PDFaswardi8756No ratings yet
- Designing Planar Magnetics DixonDocument26 pagesDesigning Planar Magnetics Dixonarulsrini77No ratings yet
- Design Construction of A 220 V Voltage StabilizerDocument50 pagesDesign Construction of A 220 V Voltage StabilizerSamuel OlusanyaNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- MK-120S User ManualDocument306 pagesMK-120S User ManualSagar PuvvulaNo ratings yet
- Current Transformer: Profile No.: 273 NIC Code: 27102Document14 pagesCurrent Transformer: Profile No.: 273 NIC Code: 27102Rama SubrahmanyamNo ratings yet
- Induction Motors Guide for Farm ApplicationsDocument9 pagesInduction Motors Guide for Farm ApplicationsramfalNo ratings yet
- 1.5kva DC To Ac Power InverterDocument14 pages1.5kva DC To Ac Power InverterOnime Terryjane JeremiahNo ratings yet
- Liebert NX Ups 40 200kva User ManualDocument154 pagesLiebert NX Ups 40 200kva User ManualMiguel LaraNo ratings yet
- DC & AC Machines and Speed ControlDocument53 pagesDC & AC Machines and Speed ControlInsane Clown Prince60% (5)
- Electrical Machines GOOD TEXTBOOKDocument72 pagesElectrical Machines GOOD TEXTBOOKRafael M. CabilanganNo ratings yet
- 151-EE-306-01-03-DC Machines2Document71 pages151-EE-306-01-03-DC Machines2Aly AshrafNo ratings yet
- What Is Shunt Trip CoilDocument1 pageWhat Is Shunt Trip Coilhasbi fadli33% (3)
- Engineering VocabularyDocument8 pagesEngineering VocabularyJoaquim Sabino PessoaNo ratings yet
- How To Select A Variable Frequency DriveDocument6 pagesHow To Select A Variable Frequency Drivedavid_diaz_sNo ratings yet
- What Is PantographDocument6 pagesWhat Is PantographTriskaNo ratings yet
- Contactors and Motor StartersDocument5 pagesContactors and Motor StartersZdan AhmadNo ratings yet
- Relay Basics Part TwoDocument4 pagesRelay Basics Part TwoMaintenance CircleNo ratings yet
- How Inductors WorkDocument3 pagesHow Inductors WorkAlex PortilloNo ratings yet
- Slip Ring and Split RingDocument5 pagesSlip Ring and Split RingboltuNo ratings yet
- Mini Project InverterDocument52 pagesMini Project InverterraycrossharmaNo ratings yet
- Power Control Devices Report Ni SottoDocument61 pagesPower Control Devices Report Ni SottoLEONEL SOTTONo ratings yet
- Time Current CurvesDocument9 pagesTime Current Curvessuleman247No ratings yet
- Buck Converter Design DemystifiedDocument6 pagesBuck Converter Design DemystifiedEric MorissetNo ratings yet
- Eaton High Voltage BreakersDocument57 pagesEaton High Voltage BreakersBob HabNo ratings yet
- Speed DrivesDocument6 pagesSpeed DrivesMazen MohamedNo ratings yet
- Balance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1Document11 pagesBalance Quality Requirements of Rigid Rotors - The Practical Application of ISO 1940-1FabbroxNo ratings yet
- Gf000280 PDFDocument8 pagesGf000280 PDFTan Yit KeongNo ratings yet
- Technical Reference Guide Fastenal K Factor and MoreDocument62 pagesTechnical Reference Guide Fastenal K Factor and Moredlight0No ratings yet
- Epri Kcp& L PaperDocument10 pagesEpri Kcp& L PaperTan Yit KeongNo ratings yet
- Lug Connections A4Document4 pagesLug Connections A4Tan Yit KeongNo ratings yet
- On Site Cable Testing With PD DiagnosisDocument8 pagesOn Site Cable Testing With PD DiagnosisTan Yit KeongNo ratings yet
- Brushed DC Motors Maintenance ConcernsDocument10 pagesBrushed DC Motors Maintenance Concernsd3xterNo ratings yet
- VW T-Cross 2019+ - Connector ViewsDocument220 pagesVW T-Cross 2019+ - Connector ViewsMucowera AshaNo ratings yet
- PIC Wire & Cable: For S22089Document1 pagePIC Wire & Cable: For S22089Vidhu SrikumaranNo ratings yet
- WDD First Floor Plaster-Layout1Document1 pageWDD First Floor Plaster-Layout1Aaron lisboaNo ratings yet
- Voltage Drop CalculationDocument159 pagesVoltage Drop CalculationansarisaeedNo ratings yet
- Three Pole Contactors MNX PDFDocument10 pagesThree Pole Contactors MNX PDFEli SharmaNo ratings yet
- MS357Document8 pagesMS357Maiquel HorstNo ratings yet
- Simbologia Eletrica 1Document4 pagesSimbologia Eletrica 1SarjitoNo ratings yet
- Vacuum Circuit Breaker or VCB and Vacuum InterrupterDocument2 pagesVacuum Circuit Breaker or VCB and Vacuum InterrupterHakim Abu BakarNo ratings yet
- Isolating Switching Amplifier for 2 Channels Under 40 CharactersDocument3 pagesIsolating Switching Amplifier for 2 Channels Under 40 CharactersadrianioantomaNo ratings yet
- 4-Stroke and 2-Stroke Engine Working PrinciplesDocument24 pages4-Stroke and 2-Stroke Engine Working PrinciplesMOAZ100% (2)
- Roughlyte CFLDocument3 pagesRoughlyte CFLtatianaNo ratings yet
- Cleme C MecatractionDocument1 pageCleme C MecatractionMatei MihaiNo ratings yet
- SUN-I Model M-100 - Installation and Use InstructionsDocument2 pagesSUN-I Model M-100 - Installation and Use InstructionsPedja BekicNo ratings yet
- QLT M10 Wux: Spare Parts List Portable Light Tower GeneratorDocument109 pagesQLT M10 Wux: Spare Parts List Portable Light Tower GeneratorCirene AparicioNo ratings yet
- Power Supply System Bza 130 02/2 - 48 V DC, With Central Unit Installation TestDocument22 pagesPower Supply System Bza 130 02/2 - 48 V DC, With Central Unit Installation TestcmapatziNo ratings yet
- Partidor Suave 46032-700-06F Trilingual Manual PDFDocument369 pagesPartidor Suave 46032-700-06F Trilingual Manual PDFCarlos Gacitua FranzottNo ratings yet
- Cummins® 50KVA Super Silent Generator Set Specifications: General FeaturesDocument3 pagesCummins® 50KVA Super Silent Generator Set Specifications: General FeaturesMohsin Nisar BajwaNo ratings yet
- BYOC E.S.V. 2-Knob Bender Kit InstructionsDocument19 pagesBYOC E.S.V. 2-Knob Bender Kit Instructionsrick_marcominiNo ratings yet
- Analytical Design of Lightning Protection Systems for Communication TowersDocument61 pagesAnalytical Design of Lightning Protection Systems for Communication TowersSampath Kumara LiyanageNo ratings yet
- PDF Grove At400 DDDocument18 pagesPDF Grove At400 DDrichard cardenasNo ratings yet
- QSK 60G & 60G High Efficiency Series Gas Engines Module 6 – ENGINE CONTROL SYSTEMDocument40 pagesQSK 60G & 60G High Efficiency Series Gas Engines Module 6 – ENGINE CONTROL SYSTEMagvassNo ratings yet
- FortressILI1 (1) .3 1420KVAbatteryDocument5 pagesFortressILI1 (1) .3 1420KVAbatteryScott ConnellyNo ratings yet
- Galleon 1-3K-ISO TX - Manual PDFDocument19 pagesGalleon 1-3K-ISO TX - Manual PDFBeto SanabriaNo ratings yet
- Wiring Diagram: Installation IQAN-MDMDocument2 pagesWiring Diagram: Installation IQAN-MDMjhonatan_silveira_8No ratings yet
- Electrical Formulas: General InformationDocument1 pageElectrical Formulas: General InformationalbertoNo ratings yet