You might also like
- Parallel Operation With A Network SystemDocument27 pagesParallel Operation With A Network Systemsaulcastano6556100% (3)
- Parallel Operation of Synchronous GeneratorDocument49 pagesParallel Operation of Synchronous Generatorbishal alamNo ratings yet
- 2.041 Woodward - EasyGen O&M PDFDocument69 pages2.041 Woodward - EasyGen O&M PDFJoséNo ratings yet
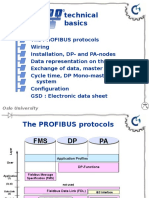
- Basics of Profibus Operation Chapter1Document19 pagesBasics of Profibus Operation Chapter1Amit KhandwalNo ratings yet
- Cummins 2011 Test On A Kta50Document2 pagesCummins 2011 Test On A Kta50api-252499008No ratings yet
- TecJet™ 85 Gas Regulation and Metering Valve / Actuator SystemDocument72 pagesTecJet™ 85 Gas Regulation and Metering Valve / Actuator SystemstanNo ratings yet
- Gas Engine HandbookDocument18 pagesGas Engine HandbookMuhammad Ahmad0% (1)
- TROUBLE0001 PB Dot & Flameout Trips PDFDocument12 pagesTROUBLE0001 PB Dot & Flameout Trips PDFJose Antonio Medina AnguloNo ratings yet
- Complexity, Liking and FamiliarityDocument12 pagesComplexity, Liking and FamiliarityAjaNo ratings yet
- Concise Guide To Quantum Computing: Sergei Kurgalin Sergei BorzunovDocument129 pagesConcise Guide To Quantum Computing: Sergei Kurgalin Sergei BorzunovVi Kem0% (1)
- CcOLD STARTUPDocument15 pagesCcOLD STARTUPAnonymous ICKtnYvC100% (1)
- Performance Improvement of Combined Cycle Power Plant Based On The Optimization of The Bottom Cycle and Heat RecuperationDocument6 pagesPerformance Improvement of Combined Cycle Power Plant Based On The Optimization of The Bottom Cycle and Heat Recuperationwgxiang100% (4)
- Black StartDocument23 pagesBlack StartSyed Ijlal HaiderNo ratings yet
- Training Session 1 Gas Turbine Basics: by Jim Noordermeer, P.Eng. Gryphon International Engineering Services IncDocument24 pagesTraining Session 1 Gas Turbine Basics: by Jim Noordermeer, P.Eng. Gryphon International Engineering Services IncM Azri Zulkipli100% (1)
- Automatic Voltage Regulator For GeneratorDocument15 pagesAutomatic Voltage Regulator For Generatormentong100% (1)
- Load SheddingDocument4 pagesLoad SheddingMuhammad RooshanNo ratings yet
- Pwps Swiftpac BrochureDocument6 pagesPwps Swiftpac BrochureWilfredo Rojo CastañoNo ratings yet
- BR GT GasturbineDocument9 pagesBR GT GasturbineVioleta Patriche100% (1)
- EGCP-3 Engine Generator Control Package: Operation ManualDocument230 pagesEGCP-3 Engine Generator Control Package: Operation Manualcyrus6_998128No ratings yet
- Parallel Operation of GeneratorsDocument7 pagesParallel Operation of GeneratorsHeru SetiawanNo ratings yet
- THM Range of Gas Turbines: Generator Drive ApplicationsDocument8 pagesTHM Range of Gas Turbines: Generator Drive ApplicationsMSD65352300No ratings yet
- Startup Sequence For SGTDocument22 pagesStartup Sequence For SGTmak6ibitek0% (1)
- Basler DECS-400 Instruction ManualDocument227 pagesBasler DECS-400 Instruction ManualileheNo ratings yet
- Fuel Change OverDocument15 pagesFuel Change OverDidik Agus SetiawanNo ratings yet
- QSK60 G6 PDFDocument2 pagesQSK60 G6 PDFShahzad Ali100% (2)
- Ge Gas Turbine Frame (9fa)Document7 pagesGe Gas Turbine Frame (9fa)ajo zinzoNo ratings yet
- Med Riad: Sponsored by Control Technology Corp. ..Document8 pagesMed Riad: Sponsored by Control Technology Corp. ..nabil160874No ratings yet
- Duties & Responsibilities of Shift EngineerDocument35 pagesDuties & Responsibilities of Shift EngineerNaveen ChodagiriNo ratings yet
- What Is The Difference Between A Cogeneration Power Plant and A Combined Cycle Power PlantDocument1 pageWhat Is The Difference Between A Cogeneration Power Plant and A Combined Cycle Power PlantRajesh RavindranNo ratings yet
- Electric GeneratorDocument7 pagesElectric GeneratorRahul ShivuNo ratings yet
- Load SharingDocument38 pagesLoad Sharingjuan manuelNo ratings yet
- Siemens Gas Turbine SGT 500 Crude OilDocument10 pagesSiemens Gas Turbine SGT 500 Crude Oilgeverett2765No ratings yet
- 9-Generator Performance Curves and Static ExciationDocument141 pages9-Generator Performance Curves and Static ExciationnboulegrouneNo ratings yet
- 3412C 725 kVA Prime LowBsfc EU 50HzDocument6 pages3412C 725 kVA Prime LowBsfc EU 50Hzrbmr1No ratings yet
- Gas Turbine Power PlantDocument15 pagesGas Turbine Power Plantrahul100% (1)
- Frequency-Power Characteristics of Synchronous GeneratorDocument29 pagesFrequency-Power Characteristics of Synchronous GeneratorFazalur Rehman Babar75% (4)
- CAT Power Plants Layout CATDocument280 pagesCAT Power Plants Layout CATburcin GozalNo ratings yet
- Turning Gear For Gas TurbinesDocument4 pagesTurning Gear For Gas TurbinesCharles3iNo ratings yet
- Training Materials For TraineeDocument899 pagesTraining Materials For TraineechudyaceNo ratings yet
- Technical Specification of 1MW Diesel Generator Power Plant Set From ChinaDocument21 pagesTechnical Specification of 1MW Diesel Generator Power Plant Set From ChinaAndrew Jeyakumar100% (1)
- Electrical System COMMISSIONING PDFDocument18 pagesElectrical System COMMISSIONING PDFelrajilNo ratings yet
- Utilization of Repetitive Surge Oscillograph (RSO)Document27 pagesUtilization of Repetitive Surge Oscillograph (RSO)Aitzaz HussainNo ratings yet
- Kta38-G5 2Document4 pagesKta38-G5 2Ali AmirNo ratings yet
- AGN071 - Load Sharing With Quadrature LoopDocument5 pagesAGN071 - Load Sharing With Quadrature LoopQuang PhamNo ratings yet
- Ignition SystemDocument6 pagesIgnition SystemNopNo ratings yet
- Parallel OperationDocument19 pagesParallel Operationkazishah80% (5)
- GTG 1383om Piel Sul 48mchpDocument18 pagesGTG 1383om Piel Sul 48mchpjohn smithyNo ratings yet
- Mitsubishi Diesel Engine - S16R-Y2PTAW2Document2 pagesMitsubishi Diesel Engine - S16R-Y2PTAW2Christian Rivera FloverNo ratings yet
- 3 Containerized 7 8MWDocument12 pages3 Containerized 7 8MWnaz-sdeNo ratings yet
- Gas Engine GoverningDocument8 pagesGas Engine GoverningMiguel SoteloNo ratings yet
- RMC-131D, Installation Instructions 4189340121 UKDocument4 pagesRMC-131D, Installation Instructions 4189340121 UKUday PowarNo ratings yet
- PLC VS DCS VS ScadaDocument12 pagesPLC VS DCS VS ScadafarhanshakeelNo ratings yet
- Woodward Industrial Turbine ControlDocument16 pagesWoodward Industrial Turbine ControlhrstgaNo ratings yet
- Caterpillar GensetsDocument3 pagesCaterpillar GensetsAnonymous BwLfvuNo ratings yet
- Ipcs Automation: Preparing Students As Per The Industry DemandsDocument8 pagesIpcs Automation: Preparing Students As Per The Industry DemandsGince GeorgeNo ratings yet
- Gas TurbineDocument16 pagesGas TurbinehusnainyasirNo ratings yet
- Sebu6400-05 - Cat Gas EngineDocument48 pagesSebu6400-05 - Cat Gas EnginetamailhamNo ratings yet
- Motor Starting On Diesel Generators: by M. G. PayneDocument5 pagesMotor Starting On Diesel Generators: by M. G. PayneyaoNo ratings yet
- AGN142 - B Pole Slipping and Reverse PowerDocument3 pagesAGN142 - B Pole Slipping and Reverse PowerLaiqNo ratings yet
- Question No 1Document14 pagesQuestion No 1Hamza AliNo ratings yet
- Emergency Generator Sizing and Motor Starting AnalysisDocument6 pagesEmergency Generator Sizing and Motor Starting AnalysisK.RamachandranNo ratings yet
- CEB Training Report 1Document17 pagesCEB Training Report 1Lakshan Walpita100% (2)
- Poisson Brackets and Constants of The MotionDocument4 pagesPoisson Brackets and Constants of The MotionPopoNo ratings yet
- TH E RE SP IRA TO RY SY ST EM: Learning ObjectivesDocument36 pagesTH E RE SP IRA TO RY SY ST EM: Learning Objectivesmaria tafaNo ratings yet
- Cs6302 Dbms Part ADocument16 pagesCs6302 Dbms Part Avenkatesan.vrs1No ratings yet
- Homework 15 Inside SimilarityDocument8 pagesHomework 15 Inside Similarityafeutlbet100% (1)
- Design Details of A Turbine Model Used For Energy Conversion in Low Flow Rate Water StreamsDocument5 pagesDesign Details of A Turbine Model Used For Energy Conversion in Low Flow Rate Water Streamsrabei romulusNo ratings yet
- Prop Final 4Document119 pagesProp Final 4Hamza Abu AsbaNo ratings yet
- IWEX - A New Ultrasonic Array Technology For Direct Imaging of Subsurface DefectsDocument5 pagesIWEX - A New Ultrasonic Array Technology For Direct Imaging of Subsurface DefectsIndigo WaveNo ratings yet
- The Salvation Army Chikankata College of Biomedical Sciences The Ministry of HealthDocument7 pagesThe Salvation Army Chikankata College of Biomedical Sciences The Ministry of HealthChabala Ng'anduNo ratings yet
- Neutralizing Amines Volume 10 Issue3Document3 pagesNeutralizing Amines Volume 10 Issue3Waleed Emara100% (1)
- Finite Element Analysis Using MATLAB ANSYS 16 HrsDocument2 pagesFinite Element Analysis Using MATLAB ANSYS 16 HrsMOHIT PANTNo ratings yet
- Engineering Drawing II (For Diploma in Engineering) : December 2019Document9 pagesEngineering Drawing II (For Diploma in Engineering) : December 2019Kamalnath GNo ratings yet
- A Syntactic Analysis of Surah Al MasadDocument14 pagesA Syntactic Analysis of Surah Al MasadLisda Farikhatunnisak100% (1)
- Vibration - Drilling DynamicsDocument41 pagesVibration - Drilling DynamicsKaleem Ullah100% (1)
- QUCM CCM Application ManualDocument30 pagesQUCM CCM Application ManualibanvegaNo ratings yet
- Repetition Radiation. Gradation.: Pure Colors TintsDocument4 pagesRepetition Radiation. Gradation.: Pure Colors TintsKathrine MacapagalNo ratings yet
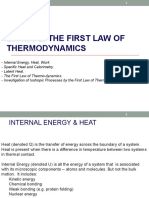
- Lecture 02 - The 1st Law of ThermodynamicsDocument24 pagesLecture 02 - The 1st Law of ThermodynamicsArc ZeroNo ratings yet
- Oil Immersed Transformer - 1311Document24 pagesOil Immersed Transformer - 1311Abegail BernabeNo ratings yet
- Chem301 Lab3Document5 pagesChem301 Lab3Gobe JamNo ratings yet
- 7805Document2 pages7805pandiNo ratings yet
- The Key of It AllDocument91 pagesThe Key of It AllSimonida Mona VulićNo ratings yet
- Cast Iron Gate Valve Non Rising Stem PN16: Features & BenefitsDocument1 pageCast Iron Gate Valve Non Rising Stem PN16: Features & BenefitsMohamed RaafatNo ratings yet
- Guia 4. Mov Aparente SolDocument4 pagesGuia 4. Mov Aparente SolAlexa ContrerasNo ratings yet
- Electrostatics - 1: Charges and ChargingDocument90 pagesElectrostatics - 1: Charges and ChargingCat123No ratings yet
- A Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Document13 pagesA Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Barbara BusanelloNo ratings yet
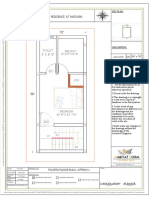
- Fourth Floor PlanDocument1 pageFourth Floor Planvenkatalakshmi natarasanNo ratings yet
- Atypical Antipsychotic Augmentation in Major Depressive DisorderDocument13 pagesAtypical Antipsychotic Augmentation in Major Depressive DisorderrantiNo ratings yet
- Data Sheet Sylomer SR 18 ENDocument4 pagesData Sheet Sylomer SR 18 ENlpczyfansNo ratings yet