You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Battery Test GuideDocument33 pagesBattery Test GuideMd Rodi BidinNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- ASVTUBE Variable Area Flowmeter FpVAFlowDocument26 pagesASVTUBE Variable Area Flowmeter FpVAFlowltrongluanvnNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Experience of Operation ReadinessDocument27 pagesExperience of Operation Readinessltrongluanvn100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Destec G RangeBrochureDocument16 pagesDestec G RangeBrochureltrongluanvn100% (2)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Vortex Meter Forbes Marshall VFM 7700 ManualDocument83 pagesVortex Meter Forbes Marshall VFM 7700 Manualltrongluanvn100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
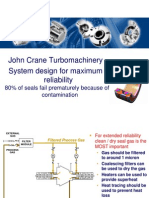
- John Crane Turbomachinery System Design For Maximum ReliabilityDocument6 pagesJohn Crane Turbomachinery System Design For Maximum ReliabilityltrongluanvnNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Statistical Financial OptimizationDocument8 pagesStatistical Financial OptimizationltrongluanvnNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Tekna NFOGM MPFM Handbook v2 2005Document115 pagesTekna NFOGM MPFM Handbook v2 2005ltrongluanvnNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- IMO Isocon-6 Isolating Signal ConverterDocument16 pagesIMO Isocon-6 Isolating Signal ConverterltrongluanvnNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 3 9005 006 Rev B M 2350A GC Controller 0H2S CEM ApplicationDocument32 pages3 9005 006 Rev B M 2350A GC Controller 0H2S CEM ApplicationltrongluanvnNo ratings yet
- Document 123Document6 pagesDocument 123EÐwîñ TäñNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- HartDocument6 pagesHartElmer HpNo ratings yet
- G-T006 User's ManualDocument9 pagesG-T006 User's ManualMax LeeNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofDocument60 pagesPluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofSrikanth GampalaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Infrasound Recording SystemDocument7 pagesInfrasound Recording SystemarunpdnNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- DSPDocument21 pagesDSPVimalendra Kumar SinghNo ratings yet
- 8000E Service ManualDocument66 pages8000E Service ManualJuan Carlos Isaza Garcia100% (1)
- ANN ControlDocument6 pagesANN ControlLissete VergaraNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- SciTech 2008 CatalogDocument16 pagesSciTech 2008 CatalogMohadig Widha RousstiaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- How To Read P@IDDocument5 pagesHow To Read P@IDM Sigit A MaskarebetNo ratings yet
- Darpa Budget PlanDocument308 pagesDarpa Budget PlanPrashantKulkarniNo ratings yet
- Fundamentals of Digital Signal Processing (DSP)Document23 pagesFundamentals of Digital Signal Processing (DSP)gtgreatNo ratings yet
- Databook Catalog Edition 2016Document394 pagesDatabook Catalog Edition 2016celjko100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Finisher q1 q3 PMDocument62 pagesFinisher q1 q3 PMutilscNo ratings yet
- Commscope Commissioning Procedure - ION-B Rev 0Document11 pagesCommscope Commissioning Procedure - ION-B Rev 0roybutcherNo ratings yet
- Catalog - Sensors (En)Document64 pagesCatalog - Sensors (En)krys_79No ratings yet
- ArcTechDigital Pro enDocument70 pagesArcTechDigital Pro endataroma100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Principles of Communication - Iit Madras Lecture MaterialDocument501 pagesPrinciples of Communication - Iit Madras Lecture MaterialNikhil Verma100% (4)
- Discrete Time SignalDocument11 pagesDiscrete Time Signaldheerajdb99No ratings yet
- TS-870 Service Manual (OCR)Document157 pagesTS-870 Service Manual (OCR)yu7aw100% (1)
- Manual Rele GE F35Document358 pagesManual Rele GE F35Clint Sawyer100% (1)
- Digital Transmission and Line Coding Techs.Document32 pagesDigital Transmission and Line Coding Techs.mgoyal_28No ratings yet
- PH MeasurementDocument22 pagesPH MeasurementLuis VilelaNo ratings yet
- Ifm Training Efector 400 PDFDocument98 pagesIfm Training Efector 400 PDFMiraNo ratings yet
- DG 95 106 e 07-07 Programmer 2Document56 pagesDG 95 106 e 07-07 Programmer 2Javier Ramirez MedinaNo ratings yet
- Design and Implementation of A 10 Bit SAR ADCDocument4 pagesDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanNo ratings yet
- Posicionador Digital Valtek Logix Series 2000Document24 pagesPosicionador Digital Valtek Logix Series 2000GustavoCruzNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FFTandMatLab Wanjun HuangDocument26 pagesFFTandMatLab Wanjun HuangDiego PurizagaNo ratings yet
- Manual L90Document502 pagesManual L90Reynaldo MamaniNo ratings yet
- H651-15 1 Minerals Applications - RevEDocument61 pagesH651-15 1 Minerals Applications - RevEEdo RossNo ratings yet