You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Medical Instrumentation Application and DesignDocument9 pagesMedical Instrumentation Application and DesignAnanchaiKonthong0% (1)
- Mercedes 190eDocument18 pagesMercedes 190eJames100% (1)
- 5042 AppDocument18 pages5042 AppAgustio Sahela BukhariNo ratings yet
- 2 4 Hole 2 3 Hole 4 Hole Puncher Unit A1 SMDocument91 pages2 4 Hole 2 3 Hole 4 Hole Puncher Unit A1 SMAashish ChaudhariNo ratings yet
- 00c95 Quanta R33Document156 pages00c95 Quanta R33Alao Moruf OlawaleNo ratings yet
- Sedra Smith Microelectronic Circuits 8Th Edition by Adel S Sedra Author Full Download ChapterDocument51 pagesSedra Smith Microelectronic Circuits 8Th Edition by Adel S Sedra Author Full Download Chapterandrea.johnson263100% (16)
- Simple Mic Audio AmplifierDocument4 pagesSimple Mic Audio AmplifierNahithaNo ratings yet
- Scilab/Scicos Toolboxes For TelecommunicationsDocument15 pagesScilab/Scicos Toolboxes For TelecommunicationsJuanNo ratings yet
- Experiment 1 - Diode Wave Shaping CircuitsDocument8 pagesExperiment 1 - Diode Wave Shaping CircuitsRJ BedañoNo ratings yet
- SCADAPack 32 ControllerDocument66 pagesSCADAPack 32 Controllersergio_costa_28No ratings yet
- CMOS Design of Pulse Processing ASIC For Radiation DetectionDocument5 pagesCMOS Design of Pulse Processing ASIC For Radiation DetectionVATSALA SHARMANo ratings yet
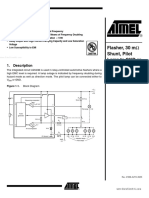
- Flasher, 30 M Shunt, Pilot Lamp To GND or V U2043B: FeaturesDocument10 pagesFlasher, 30 M Shunt, Pilot Lamp To GND or V U2043B: FeaturesVladimirNo ratings yet
- ENGR 856: Advanced VLSI Design: Mahmoodi@sfsu - EduDocument2 pagesENGR 856: Advanced VLSI Design: Mahmoodi@sfsu - EdugokulchandruNo ratings yet
- Motorola GP Lowband Service InformationDocument24 pagesMotorola GP Lowband Service InformationFilip992No ratings yet
- Home AutomationDocument11 pagesHome AutomationGangadhar maruti Girgave100% (1)
- An1683x Flyback DesignDocument25 pagesAn1683x Flyback Designnico_15_91No ratings yet
- 02-Three-Phase Smart Meter User Manual V1.0Document26 pages02-Three-Phase Smart Meter User Manual V1.0Mahesh ThapaliyaNo ratings yet
- 3ej4 - Set 01 MJDDocument7 pages3ej4 - Set 01 MJDharsshuNo ratings yet
- Semikron Datasheet Skhi 23 17 R l5002373Document11 pagesSemikron Datasheet Skhi 23 17 R l5002373Cristian Mena HidalgoNo ratings yet
- LDR Based Garage LightingDocument5 pagesLDR Based Garage Lightingsmartxdigital marketNo ratings yet
- Suppression of Switching Crosstalk and Voltage Oscillations in A Sic Mosfet Based Half-Bridge ConverterDocument19 pagesSuppression of Switching Crosstalk and Voltage Oscillations in A Sic Mosfet Based Half-Bridge Converter洪力揚No ratings yet
- A Complete Guide To Design and Build A Hi-Fi LM3886 Amplifier - Circuit BasicsDocument104 pagesA Complete Guide To Design and Build A Hi-Fi LM3886 Amplifier - Circuit BasicsPetr PetrovNo ratings yet
- TMC 249/A - Data SheetDocument29 pagesTMC 249/A - Data Sheetabonazzo77No ratings yet
- Details Syllabus of 2015-2016Document34 pagesDetails Syllabus of 2015-2016RabiulAlamNo ratings yet
- EE 209: Electrical/Electronics Lab MM 215: Experimental and Measurements LaboratoryDocument15 pagesEE 209: Electrical/Electronics Lab MM 215: Experimental and Measurements LaboratoryAbhishek KumarNo ratings yet
- Led TV: Service ManualDocument75 pagesLed TV: Service ManualGabriel GriecoNo ratings yet
- TLE7 CSS Mod4 Preparing and Interpreting Technical Drawing V3Document43 pagesTLE7 CSS Mod4 Preparing and Interpreting Technical Drawing V3EDU CHIONGNo ratings yet
- Si861x/2x Data Sheet: Low-Power Single and Dual-Channel Digital IsolatorsDocument39 pagesSi861x/2x Data Sheet: Low-Power Single and Dual-Channel Digital IsolatorsmplennaNo ratings yet
- FESTO MPS500 Manual Vision A004Document53 pagesFESTO MPS500 Manual Vision A004Oscar X. CámaraNo ratings yet