You might also like
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- Ashwin Chinnayya Et Al - A New Concept For The Modeling of Detonation Waves in Multiphase MixturesDocument10 pagesAshwin Chinnayya Et Al - A New Concept For The Modeling of Detonation Waves in Multiphase MixturesNikeShoxxxNo ratings yet
- Relaxations and discretizations for solving the NP-hard pooling problemDocument28 pagesRelaxations and discretizations for solving the NP-hard pooling problemkhaled_behery9934No ratings yet
- Exact and Approximate Construction of Offset Polygons: Ron WeinDocument10 pagesExact and Approximate Construction of Offset Polygons: Ron Weinetet103No ratings yet
- Project #1: Homogenization in Linear ElasticityDocument2 pagesProject #1: Homogenization in Linear ElasticitySuraj JayswalNo ratings yet
- A Branch-and-Bound Algorithm For The Knapsack Problem With Conflict GraphDocument24 pagesA Branch-and-Bound Algorithm For The Knapsack Problem With Conflict GraphIlma Intan SariNo ratings yet
- Kernal Methods Machine LearningDocument53 pagesKernal Methods Machine LearningpalaniNo ratings yet
- Quantum AlgorithmDocument13 pagesQuantum Algorithmramzy lekhlifiNo ratings yet
- Collapse Load Analysis of Yield-Line ElementsDocument7 pagesCollapse Load Analysis of Yield-Line ElementsAlaa Elsisi100% (1)
- Elliptic Grid - Assignment # 3 (2012420071) - WaseemDocument7 pagesElliptic Grid - Assignment # 3 (2012420071) - WaseemWaseem SakhawatNo ratings yet
- Quadratic Programming and Genetic Algorithms For Solving The Binary Constraint Satisfaction ProblemsDocument10 pagesQuadratic Programming and Genetic Algorithms For Solving The Binary Constraint Satisfaction ProblemsJournal of ComputingNo ratings yet
- Numerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerDocument23 pagesNumerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerBahadır HarmancıNo ratings yet
- Common Correlated Effects Estimation For Dynamic Heterogeneous Panels With Non-Stationary Multi-Factor Error StructuresDocument27 pagesCommon Correlated Effects Estimation For Dynamic Heterogeneous Panels With Non-Stationary Multi-Factor Error StructuresLeandro AndradeNo ratings yet
- GL (XL (1) : I (Xi') ............. orDocument8 pagesGL (XL (1) : I (Xi') ............. orjuan LuisNo ratings yet
- Analysis of gradient algorithm effectiveness for two-dimensional heat transfer problemsDocument14 pagesAnalysis of gradient algorithm effectiveness for two-dimensional heat transfer problemsca6tik01No ratings yet
- Content PDFDocument14 pagesContent PDFrobbyyuNo ratings yet
- Eliminating Oscillator Transients: A ProjectDocument4 pagesEliminating Oscillator Transients: A ProjectEpic WinNo ratings yet
- Journal of Computational Physics 34Document13 pagesJournal of Computational Physics 34MuthukumaranNo ratings yet
- 48 - Reservoir SimulationDocument20 pages48 - Reservoir Simulationrizal tri susilo100% (2)
- Analysis of Algorithms, A Case Study: Determinants of Matrices With Polynomial EntriesDocument10 pagesAnalysis of Algorithms, A Case Study: Determinants of Matrices With Polynomial EntriesNiltonJuniorNo ratings yet
- Transformer Top-Oil Temperature Modeling and Simulation: T. C. B. N. Assunção, J. L. Silvino, and P. ResendeDocument6 pagesTransformer Top-Oil Temperature Modeling and Simulation: T. C. B. N. Assunção, J. L. Silvino, and P. ResendeConstantin Dorinel0% (1)
- 1973 Wilson Sap PDFDocument18 pages1973 Wilson Sap PDFAlejandro López LlanusaNo ratings yet
- Adjustment of Automatic Capacitors Using Parametric Optimal FlowDocument8 pagesAdjustment of Automatic Capacitors Using Parametric Optimal Flowdiogo_dahlkeNo ratings yet
- FE Simulation of HoneycombDocument5 pagesFE Simulation of HoneycombManoj KumarNo ratings yet
- Recent Developments in Second-Order Integration Methods for J2 Plasticity ModelsDocument6 pagesRecent Developments in Second-Order Integration Methods for J2 Plasticity ModelscyrusnasiraiNo ratings yet
- 2008 Infinite Kernel Learning Via Infinite AnDocument34 pages2008 Infinite Kernel Learning Via Infinite AnRiri LestariNo ratings yet
- Software Updates Analyze Atoms MoleculesDocument15 pagesSoftware Updates Analyze Atoms MoleculesNorberto MonteiroNo ratings yet
- On The Effect of Linear Algebra Implementations in Real-Time Multibody System DynamicsDocument9 pagesOn The Effect of Linear Algebra Implementations in Real-Time Multibody System DynamicsCesar HernandezNo ratings yet
- Numerical Accuracy in The Solution of The ShallowDocument8 pagesNumerical Accuracy in The Solution of The ShallowFernando Robles AguilarNo ratings yet
- Learning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output DataDocument6 pagesLearning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output Datasho bhaNo ratings yet
- Linear Feedback ControlDocument14 pagesLinear Feedback ControlHung TuanNo ratings yet
- A Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityDocument16 pagesA Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityRhysUNo ratings yet
- A Linear Programming Approach To Solving Stochastic Dynamic ProgramsDocument39 pagesA Linear Programming Approach To Solving Stochastic Dynamic ProgramskcvaraNo ratings yet
- Sliding Mode Control For Linear Uncertain Switched Systems: N M×N N TDocument5 pagesSliding Mode Control For Linear Uncertain Switched Systems: N M×N N TWaj DINo ratings yet
- LS STAG MethodDocument6 pagesLS STAG MethodKian ChuanNo ratings yet
- The Concave-Convex ProcedureDocument32 pagesThe Concave-Convex Procedurewill_azizNo ratings yet
- A Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaoDocument32 pagesA Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaowatersakanaNo ratings yet
- Chen HF Strathprints Lower and Upper Bound Shakedown Analysis of Structures With Temperature Dependent Yield Stress Feb 2010Document27 pagesChen HF Strathprints Lower and Upper Bound Shakedown Analysis of Structures With Temperature Dependent Yield Stress Feb 2010Othman BouazizNo ratings yet
- IJNME Eigenvalues RevDocument32 pagesIJNME Eigenvalues RevAdenilson SwokowskiNo ratings yet
- V47i07 PDFDocument15 pagesV47i07 PDFPaulo SérgioNo ratings yet
- 2 To 1 MuxDocument19 pages2 To 1 MuxTelmoDiez100% (1)
- Dynamic Analysis of A Car Chassis Frame Using The Finite Element MethodDocument10 pagesDynamic Analysis of A Car Chassis Frame Using The Finite Element MethodNir ShoNo ratings yet
- Solution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowDocument22 pagesSolution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowCFDiran.irNo ratings yet
- 58 MelnikovDocument13 pages58 MelnikovMayurNo ratings yet
- López Reyes, DanaeDocument55 pagesLópez Reyes, DanaeAbraham TQNo ratings yet
- Numerical Methods For Distributed SysytemsDocument25 pagesNumerical Methods For Distributed SysytemsAli HesamediniNo ratings yet
- Problem Set 5: Problem 1: Steady Heat Equation Over A 1D Fin With A Finite Volume MethodDocument5 pagesProblem Set 5: Problem 1: Steady Heat Equation Over A 1D Fin With A Finite Volume MethodAman JalanNo ratings yet
- Sborník Vědeckých Prací Vysoké Školy Báňské - Technické Univerzity OstravaDocument10 pagesSborník Vědeckých Prací Vysoké Školy Báňské - Technické Univerzity OstravaroccaNo ratings yet
- Finite Volume TVD Schemes for Magnetohydrodynamics on Unstructured GridsDocument21 pagesFinite Volume TVD Schemes for Magnetohydrodynamics on Unstructured GridsRandallHellVargasPradinettNo ratings yet
- Project 5 2017 PDFDocument3 pagesProject 5 2017 PDFSuraj JayswalNo ratings yet
- Trends in Numerical Linear AlgebraDocument19 pagesTrends in Numerical Linear Algebramanasdutta3495No ratings yet
- Numerical Solu Tio 00 S NidDocument112 pagesNumerical Solu Tio 00 S Nidmanuelperezz25No ratings yet
- Simulating Org A No GenesisDocument5 pagesSimulating Org A No GenesisDenis MenshikovNo ratings yet
- A. H. Land A. G. Doig: Econometrica, Vol. 28, No. 3. (Jul., 1960), Pp. 497-520Document27 pagesA. H. Land A. G. Doig: Econometrica, Vol. 28, No. 3. (Jul., 1960), Pp. 497-520john brownNo ratings yet
- Is Your Mesh Refined Enough? Estimating Discretization Error Using GCIDocument0 pagesIs Your Mesh Refined Enough? Estimating Discretization Error Using GCIAntonio Martín AlcántaraNo ratings yet
- Pre Solving in Linear ProgrammingDocument16 pagesPre Solving in Linear ProgrammingRenato Almeida JrNo ratings yet
- UrbaWind, A Computational Fluid Dynamics Tool To Predict Wind Resource in Urban AreaDocument9 pagesUrbaWind, A Computational Fluid Dynamics Tool To Predict Wind Resource in Urban AreaMeteodyn_UrbawindNo ratings yet
- Recent Advances in Practical Finite Element AnalysisDocument11 pagesRecent Advances in Practical Finite Element AnalysismariomatoNo ratings yet
- Finite Deformation General Theory 2013 11 25Document67 pagesFinite Deformation General Theory 2013 11 25msyexploreNo ratings yet
- BHGGDocument15 pagesBHGGMohammed Abu SufianNo ratings yet
- 1 s2.0 S0263822315004705 Main PDFDocument15 pages1 s2.0 S0263822315004705 Main PDFmsyexploreNo ratings yet
- Lecture Xfem MeshfreeDocument147 pagesLecture Xfem MeshfreemsyexploreNo ratings yet
- Ansys CFX 12 TutorialsDocument578 pagesAnsys CFX 12 Tutorialsshaozhen67% (3)
- A Generalisation of J2.flow TheoryDocument16 pagesA Generalisation of J2.flow TheorymsyexploreNo ratings yet
- Influence of Porosity On FatigueDocument4 pagesInfluence of Porosity On FatiguemsyexploreNo ratings yet
- The Weighted Histogram Analysis Method (WHAM) : Michael AndrecDocument14 pagesThe Weighted Histogram Analysis Method (WHAM) : Michael AndrecWilliam AgudeloNo ratings yet
- Chapter 6. ThermodynamicsDocument7 pagesChapter 6. Thermodynamicshoney1002No ratings yet
- 4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFDocument500 pages4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFMittapalli SaikiranNo ratings yet
- Comparison of Design of Steel Roof Truss Using IS 875 and SP 38Document3 pagesComparison of Design of Steel Roof Truss Using IS 875 and SP 38anbugobiNo ratings yet
- PCAB List of Licensed Contractors For CFY 2017-2018 As of 19 Sep 2017 - Web2Document175 pagesPCAB List of Licensed Contractors For CFY 2017-2018 As of 19 Sep 2017 - Web2Paige Lim76% (21)
- Design Guide Handbook For EN 1996 Design of Masonry StructuresDocument46 pagesDesign Guide Handbook For EN 1996 Design of Masonry Structuresbusyspider100% (1)
- Ad 7746Document28 pagesAd 7746pskorovsNo ratings yet
- Installation Operation Maintenance Manual (Harvest Series)Document36 pagesInstallation Operation Maintenance Manual (Harvest Series)berkahharianNo ratings yet
- Handbook5 PDFDocument257 pagesHandbook5 PDFZAKROUNNo ratings yet
- Direct Determination of The Flow Curves of NoDocument4 pagesDirect Determination of The Flow Curves of NoZaid HadiNo ratings yet
- 37eb PDFDocument29 pages37eb PDFZikriaKMuhammadNo ratings yet
- Marking Scheme Physics Trial SPM SBP 2016 Paper 3Document6 pagesMarking Scheme Physics Trial SPM SBP 2016 Paper 3Anonymous UypCttWNo ratings yet
- Catalog Whatman 2018.compressedDocument214 pagesCatalog Whatman 2018.compressedRakha Milan BachtiarNo ratings yet
- Review of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingDocument51 pagesReview of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingVicky GautamNo ratings yet
- Modeling of Synchronous Generators in Power System Studies: October 2016Document12 pagesModeling of Synchronous Generators in Power System Studies: October 2016aswardiNo ratings yet
- ROCKYDocument4 pagesROCKYNelson Alexander Aponte SimbronNo ratings yet
- A Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternDocument1 pageA Fractal Dimension Is A Ratio Providing A Statistical Index of Complexity Comparing How Detail in A PatternBaribari BalNo ratings yet
- M04 TemperatureDocument64 pagesM04 TemperatureLê Văn TrườngNo ratings yet
- Tensile Strength of Mass Concrete 913-938 PDFDocument28 pagesTensile Strength of Mass Concrete 913-938 PDFchutton681No ratings yet
- Spectrophotometric Determination of The Equilibrium Constant of A ReactionDocument5 pagesSpectrophotometric Determination of The Equilibrium Constant of A Reactionnarras11100% (1)
- The Mystery of Relationship Charts RevealedDocument5 pagesThe Mystery of Relationship Charts RevealedPhalgun Balaaji0% (1)
- SOFTENING POINTDocument8 pagesSOFTENING POINTSusi MulyaniNo ratings yet
- Offshore Pipeline Hydraulic and Mechanical AnalysesDocument25 pagesOffshore Pipeline Hydraulic and Mechanical AnalysesEslam RedaNo ratings yet
- Cluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)Document33 pagesCluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)manpreetsingh3458417No ratings yet
- 5th Grade 13-14 Math Common Core Standards by QuarterDocument3 pages5th Grade 13-14 Math Common Core Standards by QuartermrkballNo ratings yet
- Abaqus Analysis User's Manual, 32.15 (User Elements)Document22 pagesAbaqus Analysis User's Manual, 32.15 (User Elements)Elias BuNo ratings yet
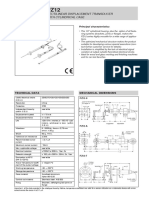
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926No ratings yet
- Math 115 HW #9 Solutions PDFDocument7 pagesMath 115 HW #9 Solutions PDFHyan Gontijo0% (1)
- Dr. Mezmer's Psychopedia of Bad PsychologyDocument378 pagesDr. Mezmer's Psychopedia of Bad PsychologyArt Marr100% (5)
- Aditya and VarahaDocument7 pagesAditya and VarahaVibhats VibhorNo ratings yet