You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Simple DC To DC Converter CircuitsDocument10 pagesSimple DC To DC Converter Circuitscarlken_07100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- STANAG 4355 - The Modified Point Mass and Five Degrees of Freedom Trajectory Models. Edition 3Document95 pagesSTANAG 4355 - The Modified Point Mass and Five Degrees of Freedom Trajectory Models. Edition 3stalker2222100% (4)
- Quick Strip Theory Calculations in Ship DesignDocument11 pagesQuick Strip Theory Calculations in Ship Designsalman GtrNo ratings yet
- 50 Top Network Analysis Lab Viva Questions and Answers - Eee Eee Viva QuestionsDocument6 pages50 Top Network Analysis Lab Viva Questions and Answers - Eee Eee Viva QuestionsDINESHNo ratings yet
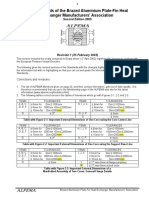
- Alpema Standards2rev1 PDFDocument8 pagesAlpema Standards2rev1 PDFGustavo CunhaNo ratings yet
- ACS 600 Installation and Start-Up GuideNBRA-6XX Braking ChoppersDocument56 pagesACS 600 Installation and Start-Up GuideNBRA-6XX Braking ChoppersJohn SimancaNo ratings yet
- Chapter 19 Angular MomentumDocument29 pagesChapter 19 Angular Momentumgokcen87No ratings yet
- Thesis Final - JYOTI KANDELDocument49 pagesThesis Final - JYOTI KANDELAbhishek AcharyaNo ratings yet
- Three Phase Transformer PDFDocument82 pagesThree Phase Transformer PDFAmitava Biswas77% (13)
- Info Iec60269-1 (Ed4.1) BDocument17 pagesInfo Iec60269-1 (Ed4.1) BExata MetrologiaNo ratings yet
- PaperDocument6 pagesPapermohitNo ratings yet
- LT 1725 PDFDocument28 pagesLT 1725 PDFtallrajNo ratings yet
- Wedekind 1971Document8 pagesWedekind 1971Francisco OppsNo ratings yet
- New BQ Proposal - 20230625Document13 pagesNew BQ Proposal - 20230625Ranu BayaNo ratings yet
- Application Fields of High-Temperature SuperconductorsDocument14 pagesApplication Fields of High-Temperature SuperconductorsMohamed Kather BatchaNo ratings yet
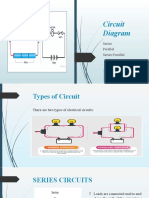
- Circuit DiagramDocument44 pagesCircuit DiagramMariah Jeanne De VeraNo ratings yet
- Vibrations of Single Degree of Freedom Systems: M X (T) F (T) KDocument25 pagesVibrations of Single Degree of Freedom Systems: M X (T) F (T) KIbraheem OlugbadeNo ratings yet
- 1.3 APES How Does Your State Make ElectricityDocument6 pages1.3 APES How Does Your State Make Electricityalexxa cNo ratings yet
- Sigmatone: TRIAC Switch To Control High Voltage DevicesDocument2 pagesSigmatone: TRIAC Switch To Control High Voltage DevicesMariGanesh100% (2)
- Resistor Techniques Worksheet - Ahaguru Date 12.0819Document3 pagesResistor Techniques Worksheet - Ahaguru Date 12.0819AyurvaidyaNo ratings yet
- CHILLER ROOM SPECSDocument3 pagesCHILLER ROOM SPECSKhaldoun Bayazid100% (1)
- Electrical Engineering Mechanics ExperimentsDocument19 pagesElectrical Engineering Mechanics ExperimentsshaunNo ratings yet
- Electricity RevisionDocument10 pagesElectricity RevisionJoel OkohNo ratings yet
- This Study Resource Was: Past Board Exam Questions in DC Machines DC GeneratorsDocument8 pagesThis Study Resource Was: Past Board Exam Questions in DC Machines DC GeneratorsJohn Dean UrbanozoNo ratings yet
- KM M CM MM: Basic MeasurementsDocument5 pagesKM M CM MM: Basic MeasurementsMuralee VeeramalaiNo ratings yet
- SIMSEN Leaflet 14 Detailed PDFDocument34 pagesSIMSEN Leaflet 14 Detailed PDFSuresh CNo ratings yet
- 2-Kinematics-Newtonian Mechanics-Cie Olevel PhysicsDocument29 pages2-Kinematics-Newtonian Mechanics-Cie Olevel PhysicsMuhammad FarooqNo ratings yet
- EMT10 NewDocument12 pagesEMT10 NewzcaptNo ratings yet
- Cha 2Document52 pagesCha 2yaredNo ratings yet
- IEEE STD ANSI-IEEE STD 530-1978Document59 pagesIEEE STD ANSI-IEEE STD 530-1978abdou samiNo ratings yet