You might also like
- Bitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroFrom EverandBitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroNo ratings yet
- RA8875Document174 pagesRA8875liyuyao001No ratings yet
- Programming the Propeller with Spin: A Beginner's Guide to Parallel ProcessingFrom EverandProgramming the Propeller with Spin: A Beginner's Guide to Parallel ProcessingNo ratings yet
- Foam Cutting Power SupplyDocument3 pagesFoam Cutting Power Supplyxiaoboshi100% (1)
- KK 2.1 Multi-Rotor Control Board: User GuideDocument14 pagesKK 2.1 Multi-Rotor Control Board: User GuideSandal MasjidNo ratings yet
- Frequently Asked Questions (And Answers) About Reverse EngineeringDocument15 pagesFrequently Asked Questions (And Answers) About Reverse EngineeringAnonymous i3HHYO8No ratings yet
- Build A Remote Control DeadboltDocument10 pagesBuild A Remote Control DeadboltWeb devNo ratings yet
- HDC24xx Datasheet RoboteqDocument13 pagesHDC24xx Datasheet Roboteqluismena09051982No ratings yet
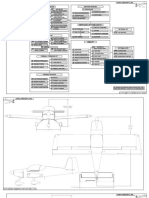
- Vans Aircraft Building InstructionDocument6 pagesVans Aircraft Building Instructionsandy100% (1)
- HTTP HomepowerDocument9 pagesHTTP Homepowergarysmith1No ratings yet
- 10kW All-In-One The Hybrid Inverter User Manual: Important NoticeDocument54 pages10kW All-In-One The Hybrid Inverter User Manual: Important NoticeAbdulrehman SoomroNo ratings yet
- Diy Arduino Flight Controller PDFDocument15 pagesDiy Arduino Flight Controller PDFVishal ThakurNo ratings yet
- Electronic Circuit Design and Component SelectionDocument44 pagesElectronic Circuit Design and Component SelectionRamanan MNo ratings yet
- 5 Steps in Stick WeldingDocument7 pages5 Steps in Stick WeldingEm Hernandez AranaNo ratings yet
- Flatback Airfoil Wind Tunnel ExperimentDocument37 pagesFlatback Airfoil Wind Tunnel Experimentvictoria100% (1)
- One Whee Led: Self-Balancing Skateboard / Scooter Projects: One and Two WheeledDocument13 pagesOne Whee Led: Self-Balancing Skateboard / Scooter Projects: One and Two WheeledJobanjit SinghNo ratings yet
- Ruger SuperredhawkDocument32 pagesRuger SuperredhawkValeriy ZadorozhnyiNo ratings yet
- Low Power RF GuideDocument45 pagesLow Power RF Guidedormevu0% (1)
- Quadcopter PDFDocument14 pagesQuadcopter PDFabhiarora4100% (1)
- KK2.1.X Instruction Manual V1.19S1 ProDocument38 pagesKK2.1.X Instruction Manual V1.19S1 ProAnonymous Gcqk4Pry3rNo ratings yet
- 3D Printed Robot Arm - 16 Steps (With Pictures)Document25 pages3D Printed Robot Arm - 16 Steps (With Pictures)José ManuelNo ratings yet
- Cooling: Technical ViewDocument39 pagesCooling: Technical ViewKevinHuamanDiazNo ratings yet
- Building A Home Security System With Arduino - Sample ChapterDocument14 pagesBuilding A Home Security System With Arduino - Sample ChapterPackt Publishing100% (1)
- How To Wire An Arduino Based 3 Axis CNC MachineDocument11 pagesHow To Wire An Arduino Based 3 Axis CNC MachineSetyo WidodoNo ratings yet
- Virtual WireDocument13 pagesVirtual WirePedro Nuno Sabugueiro OliveiraNo ratings yet
- E 34 MioDocument76 pagesE 34 Miodamelo100% (1)
- Wheel: Hub MotorDocument7 pagesWheel: Hub Motormilou88No ratings yet
- Parts Breakdown HP2070: Page 1 of 3 2/8/2008Document3 pagesParts Breakdown HP2070: Page 1 of 3 2/8/2008Zaidu zamaan100% (1)
- Bravo Niner Rocket Motor KitDocument16 pagesBravo Niner Rocket Motor Kitobx4everNo ratings yet
- Experiments EPLDocument24 pagesExperiments EPLMonicaSekarNo ratings yet
- DIY Arduino 3D Laser ScannerDocument8 pagesDIY Arduino 3D Laser ScannerHilman HazmiNo ratings yet
- Sailor SP3110Document124 pagesSailor SP3110serNo ratings yet
- LinuxCNC IntegratorDocument21 pagesLinuxCNC IntegratormilknaniNo ratings yet
- Making A T-NutDocument8 pagesMaking A T-NutkokiskoNo ratings yet
- SainSmart Genmitsu CNC Router 3018-User ManualDocument26 pagesSainSmart Genmitsu CNC Router 3018-User ManualFernando MarcanoNo ratings yet
- 6 DOF Robot Arm Installation DiagramDocument8 pages6 DOF Robot Arm Installation DiagramMarcel RibeiroNo ratings yet
- Hot Wire Manchine - User Manual-ENDocument41 pagesHot Wire Manchine - User Manual-ENZoliNo ratings yet
- Argonaut SLDocument330 pagesArgonaut SLShankar_atkareNo ratings yet
- Nontraditional Machining Processes: Mr. D. N. PatelDocument53 pagesNontraditional Machining Processes: Mr. D. N. PatelrrameshsmitNo ratings yet
- 3d Open Source Foam CutterDocument22 pages3d Open Source Foam CutterOtto GonzalezNo ratings yet
- Glow Plug Cross ReferenceDocument6 pagesGlow Plug Cross ReferenceArturo Montes F.No ratings yet
- The Multimachine $150, 12" Swing, Metal Lathe/Mill/Drill: Tools Used in This ProjectDocument38 pagesThe Multimachine $150, 12" Swing, Metal Lathe/Mill/Drill: Tools Used in This ProjectMartin Ong100% (1)
- Eagle TutorialDocument6 pagesEagle Tutorialgenuinelycool100% (1)
- Gs 3 MDocument316 pagesGs 3 MNazielNo ratings yet
- Dell 2145cn Service Manual PDFDocument208 pagesDell 2145cn Service Manual PDFMārtiņš DreijersNo ratings yet
- Delta Vfd-S ManualDocument185 pagesDelta Vfd-S Manualramesh sahukhal100% (1)
- Build The Second Generation Arc Reactor PDFDocument10 pagesBuild The Second Generation Arc Reactor PDFFrank CifuentesNo ratings yet
- Rare Xbee S2 Datasheet PDFDocument228 pagesRare Xbee S2 Datasheet PDFSharath Munduri0% (1)
- RC Submarine Final ReportDocument8 pagesRC Submarine Final Reportshijo vadakkan100% (1)
- Nozzle Design Optimization To Reduce Noice For Turbo Jet EngineDocument16 pagesNozzle Design Optimization To Reduce Noice For Turbo Jet EngineSri Tech EngineeringNo ratings yet
- OFC-Joints & ConnectionsDocument51 pagesOFC-Joints & ConnectionsDeepika DhalNo ratings yet
- A Homebuilt Threshing Machine For Small HoldersDocument62 pagesA Homebuilt Threshing Machine For Small HoldersJaremy Scott Golightly100% (1)
- P.E.S. College of Engineering, Aurangabad.: Project ReportDocument25 pagesP.E.S. College of Engineering, Aurangabad.: Project ReportShaikh Ibrahim0% (1)
- Hobbywing WP 1040Document2 pagesHobbywing WP 1040andresNo ratings yet
- SLA 3d PrinterDocument80 pagesSLA 3d Printerbitu&piutaNo ratings yet
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097No ratings yet
- Unit 9 Microprocessors: StructureDocument31 pagesUnit 9 Microprocessors: StructureudayNo ratings yet
- 05 حاسباتDocument202 pages05 حاسباتMina AlbertNo ratings yet
- The Hardware Side - Part 1: An IntroductionDocument68 pagesThe Hardware Side - Part 1: An Introductionragavendra4No ratings yet
- Introduction of Microcontroller History of Microcontroller Microcontrollers Versus Microprocessors Constructions of Microcontroller Microcontroller ApplicationsDocument13 pagesIntroduction of Microcontroller History of Microcontroller Microcontrollers Versus Microprocessors Constructions of Microcontroller Microcontroller ApplicationsMohamed EnalotiNo ratings yet
- 19.design and ImplementationDocument2 pages19.design and ImplementationDrVikas Singh BhadoriaNo ratings yet
- Suresh 2020Document45 pagesSuresh 2020DrVikas Singh BhadoriaNo ratings yet
- A Multi Objective Hybrid Algorithm For Optimal Planning of Distributed GenerationDocument20 pagesA Multi Objective Hybrid Algorithm For Optimal Planning of Distributed GenerationDrVikas Singh BhadoriaNo ratings yet
- Electrical Power and Energy Systems: Amin Khodabakhshian, Mohammad Hadi AndishgarDocument9 pagesElectrical Power and Energy Systems: Amin Khodabakhshian, Mohammad Hadi AndishgarDrVikas Singh BhadoriaNo ratings yet
- Smart Sensors: Dr. Vikas Singh BhadoriaDocument17 pagesSmart Sensors: Dr. Vikas Singh BhadoriaDrVikas Singh BhadoriaNo ratings yet
- Smart Appliances: Dr. Vikas Singh BhadoriaDocument16 pagesSmart Appliances: Dr. Vikas Singh BhadoriaDrVikas Singh BhadoriaNo ratings yet
- Vehicle To Grid v2g Introduction OperatiDocument41 pagesVehicle To Grid v2g Introduction OperatiAdisuNo ratings yet
- Real Time PricingDocument13 pagesReal Time PricingDrVikas Singh BhadoriaNo ratings yet
- Pumped StorageDocument20 pagesPumped Storagesabin birbal100% (1)
- Home and Building AutomationDocument15 pagesHome and Building AutomationDrVikas Singh BhadoriaNo ratings yet
- Introduction To Smart MetersDocument17 pagesIntroduction To Smart MetersDrVikas Singh Bhadoria100% (2)
- Real Time PricingDocument13 pagesReal Time PricingDrVikas Singh BhadoriaNo ratings yet
- Home and Building AutomationDocument15 pagesHome and Building AutomationDrVikas Singh BhadoriaNo ratings yet
- Outage Management SystemDocument13 pagesOutage Management SystemDrVikas Singh BhadoriaNo ratings yet
- Automatic Meter ReadingDocument16 pagesAutomatic Meter ReadingDrVikas Singh BhadoriaNo ratings yet
- Home and Building AutomationDocument15 pagesHome and Building AutomationDrVikas Singh BhadoriaNo ratings yet
- Outage Management SystemDocument13 pagesOutage Management SystemDrVikas Singh BhadoriaNo ratings yet
- Smart Grid and Smart Meters: R.P. SinghDocument31 pagesSmart Grid and Smart Meters: R.P. SinghDrVikas Singh BhadoriaNo ratings yet
- Introduction To Smart MetersDocument17 pagesIntroduction To Smart MetersDrVikas Singh Bhadoria100% (2)
- Pumped StorageDocument20 pagesPumped Storagesabin birbal100% (1)
- Wide Area Measurement Systems: March 2012Document21 pagesWide Area Measurement Systems: March 2012DrVikas Singh BhadoriaNo ratings yet
- Automatic Meter ReadingDocument16 pagesAutomatic Meter ReadingDrVikas Singh BhadoriaNo ratings yet
- Phasor Measurement Units in The Indian Smart Grid: Mohd Rihan Mukhtar Ahmad M. Salim BegDocument7 pagesPhasor Measurement Units in The Indian Smart Grid: Mohd Rihan Mukhtar Ahmad M. Salim BegDrVikas Singh BhadoriaNo ratings yet
- Reliability Improvement ofDocument9 pagesReliability Improvement ofDrVikas Singh BhadoriaNo ratings yet
- SOS Algorithm For DG Placement For Loss Minimization Considering Reverse Power Flow in The Distribution SystemsDocument6 pagesSOS Algorithm For DG Placement For Loss Minimization Considering Reverse Power Flow in The Distribution SystemsDrVikas Singh BhadoriaNo ratings yet
- Superconducting Magnetic Energy Storage: PrincipleDocument2 pagesSuperconducting Magnetic Energy Storage: PrincipleDrVikas Singh BhadoriaNo ratings yet
- 1096 4889 2 PBDocument27 pages1096 4889 2 PBDavid Andrés Bessalle ReyesNo ratings yet
- Electrical Power and Energy Systems: F.J. Ruiz-Rodriguez, M. Gomez-Gonzalez, F. JuradoDocument9 pagesElectrical Power and Energy Systems: F.J. Ruiz-Rodriguez, M. Gomez-Gonzalez, F. JuradoDrVikas Singh BhadoriaNo ratings yet
- Reliability Improvement of Distribution System by Optimal Placement Ofdgs Using Pso and Neural NetworkDocument7 pagesReliability Improvement of Distribution System by Optimal Placement Ofdgs Using Pso and Neural NetworkDrVikas Singh BhadoriaNo ratings yet
- Electrical Power and Energy Systems: N. Khalesi, N. Rezaei, M.-R. HaghifamDocument8 pagesElectrical Power and Energy Systems: N. Khalesi, N. Rezaei, M.-R. HaghifamDrVikas Singh BhadoriaNo ratings yet
- English-G7-Q1 Week 3-Revised PDFDocument33 pagesEnglish-G7-Q1 Week 3-Revised PDFClint Morrera DelgadoNo ratings yet
- Introduction To Programming With C 3rd Edition Liang Test BankDocument5 pagesIntroduction To Programming With C 3rd Edition Liang Test Banklioneldatfcc12100% (27)
- Vedic Mathematics - Bharati Krishna Tirth Ji Maharaj - TextDocument415 pagesVedic Mathematics - Bharati Krishna Tirth Ji Maharaj - TextPrashant Prem100% (2)
- AAG Characters 1040Document32 pagesAAG Characters 1040Stupar Avram100% (1)
- Module 3 CP 03 - Critical ReadingDocument10 pagesModule 3 CP 03 - Critical ReadingMishael InfanteNo ratings yet
- Trinidad y TobagoDocument11 pagesTrinidad y TobagoPris FeversaniNo ratings yet
- Tom SwayerDocument34 pagesTom SwayerJæž ËviNo ratings yet
- Reading Comprehension Practice Reading 1: "Cookout"Document4 pagesReading Comprehension Practice Reading 1: "Cookout"Anabel EspinozaNo ratings yet
- Tayong Lahat, Magpasalamat SATB A CappellaDocument4 pagesTayong Lahat, Magpasalamat SATB A CappellaAbner Ryan S. TauroNo ratings yet
- Ethnic American LiteratureDocument595 pagesEthnic American LiteratureFüleki Eszter80% (5)
- Tieng Anh 8 de Thi Chon HSGDocument5 pagesTieng Anh 8 de Thi Chon HSGNaruto Sakura100% (1)
- Hopkins, Gerard Manley - The Collected Works of Gerard Manley Hopkins - Volume IV - Oxford Essays and NDocument393 pagesHopkins, Gerard Manley - The Collected Works of Gerard Manley Hopkins - Volume IV - Oxford Essays and NazzogueNo ratings yet
- EnglishFile4e Upp-Int TG PCM Grammar 8BDocument1 pageEnglishFile4e Upp-Int TG PCM Grammar 8BDawid KobylańskiNo ratings yet
- CEREC AC Omnicam: Installation Instructions For Windows 10 Performance PackDocument10 pagesCEREC AC Omnicam: Installation Instructions For Windows 10 Performance PackdirkfalkNo ratings yet
- VFB '/iffm KL/JF/SF) '/iff: Kmfob) LV E08F/0F DDDocument4 pagesVFB '/iffm KL/JF/SF) '/iff: Kmfob) LV E08F/0F DDRajesh KoiralaNo ratings yet
- Guiding Questions Overview HandoutsDocument6 pagesGuiding Questions Overview Handoutscalibur HonsaloNo ratings yet
- Reg CDocument43 pagesReg CsarvanmeNo ratings yet
- RGBDuino Manual V1.1Document35 pagesRGBDuino Manual V1.1Ruben EsquedaNo ratings yet
- Learnenglish Kids Using Stories: A.Activities To Prepare Children For ReadingDocument3 pagesLearnenglish Kids Using Stories: A.Activities To Prepare Children For ReadingdavidNo ratings yet
- Elements and Techniques Identification AnalysisDocument1 pageElements and Techniques Identification AnalysisRiza GallanongoNo ratings yet
- System Software Unit 6: Macro Processor Book: System Software, 3 Edition, Pearson Education by Leland L. Beck & Dhanabalachandran ManjulaDocument3 pagesSystem Software Unit 6: Macro Processor Book: System Software, 3 Edition, Pearson Education by Leland L. Beck & Dhanabalachandran ManjulaKrishnapriya MenonNo ratings yet
- Prescriptive GrammarDocument10 pagesPrescriptive GrammarMonette Rivera Villanueva100% (2)
- Week 4 IT135-8Document2 pagesWeek 4 IT135-8Jerwin Dela CruzNo ratings yet
- Bluetooth Protocol StackDocument3 pagesBluetooth Protocol Stackkayal_eceNo ratings yet
- Wyndham Lewis: Portrait of The Artist As An EnemyDocument392 pagesWyndham Lewis: Portrait of The Artist As An EnemyJonathan Carson100% (4)
- EDIFACTDocument71 pagesEDIFACTAnshuman021No ratings yet
- A Brief History On ÆthelflædDocument1 pageA Brief History On ÆthelflædAtceraNo ratings yet
- Matlab Code 3Document29 pagesMatlab Code 3kthshlxyzNo ratings yet
- Bible Quiz Bee ReviewerDocument2 pagesBible Quiz Bee ReviewerJennylinRiveraMagcalasNo ratings yet
- Capstone Project 1: User StoryDocument28 pagesCapstone Project 1: User StoryHoàng Văn HiếuNo ratings yet