You might also like
- Description of Works Nos L B D Q Rate/Unit AmountDocument10 pagesDescription of Works Nos L B D Q Rate/Unit AmountVijay Kumar DNo ratings yet
- 1EW12CV025Document1 page1EW12CV025Vijay Kumar DNo ratings yet
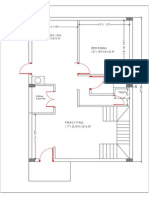
- Kitchen / Din. 11'0"X16'4.5"Document1 pageKitchen / Din. 11'0"X16'4.5"Vijay Kumar DNo ratings yet
- Final Boq For Sis HouseDocument6 pagesFinal Boq For Sis HouseVijay Kumar DNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- O3 Final ReportDocument109 pagesO3 Final ReportFaizan MirNo ratings yet
- Theil Index DecompositionDocument2 pagesTheil Index DecompositionshareevNo ratings yet
- LaMotte 3176-01 Chlorine Kit InstructionsDocument4 pagesLaMotte 3176-01 Chlorine Kit InstructionsPromagEnviro.comNo ratings yet
- Promaspray® F5 PDFDocument4 pagesPromaspray® F5 PDFhero6600No ratings yet
- Physics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETDocument36 pagesPhysics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETadityaNo ratings yet
- Basf Masterseal 912 Tds PDFDocument2 pagesBasf Masterseal 912 Tds PDFDhananjay ShindeNo ratings yet
- SSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDocument53 pagesSSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDaniel Dambo100% (1)
- Fatigue Failure Analysis of Fillet Welded Joints Used in Offshore StructuresDocument78 pagesFatigue Failure Analysis of Fillet Welded Joints Used in Offshore Structureschrism225836No ratings yet
- Mixing Time Jet MixerDocument9 pagesMixing Time Jet MixerLTE002No ratings yet
- Thermal Physics Self-Made NotesDocument4 pagesThermal Physics Self-Made NotesYee Xien LimNo ratings yet
- TIMSS8 Science ConceptsItems 6Document25 pagesTIMSS8 Science ConceptsItems 6adisan777No ratings yet
- Nizo BrochureDocument12 pagesNizo Brochurejeanjean33No ratings yet
- CV AkhyarDocument31 pagesCV AkhyarNaveed UR RehmanNo ratings yet
- Charlotte Perriand - From Photography To Design - de La Photographie Au DesignDocument3 pagesCharlotte Perriand - From Photography To Design - de La Photographie Au DesignCamille BinzNo ratings yet
- G. ACI 360R-06 Brings Slabs On Ground Into The 21st Century - Art McKinney PDFDocument2 pagesG. ACI 360R-06 Brings Slabs On Ground Into The 21st Century - Art McKinney PDFinitbashNo ratings yet
- Midas Gen: RC Beam Serviceability Checking ResultDocument2 pagesMidas Gen: RC Beam Serviceability Checking ResultakankwasaNo ratings yet
- Pendulum Lab 1Document3 pagesPendulum Lab 1Ashley AllenNo ratings yet
- Che 0411 Steam Heat Exchangers Are UnderworkedDocument5 pagesChe 0411 Steam Heat Exchangers Are UnderworkedXpizmonNo ratings yet
- Chapter 2 - CablesDocument6 pagesChapter 2 - CablesFifie HoyehNo ratings yet
- Solar Tracker Using ArduinoDocument3 pagesSolar Tracker Using ArduinoInternational Journal of Innovative Science and Research Technology100% (1)
- Tesis MIT Slurry TransportDocument81 pagesTesis MIT Slurry TransportCarlos Esaú López GómezNo ratings yet
- Quiz 6 EnergyDocument2 pagesQuiz 6 Energyeloizamay100% (1)
- Algebra 2 Unit 3 StudentDocument68 pagesAlgebra 2 Unit 3 Studentapi-327127977No ratings yet
- Ur5 KinematicsDocument12 pagesUr5 KinematicsNikhil GuptaNo ratings yet
- Thomson BSA Grease BrochureDocument1 pageThomson BSA Grease BrochureElectromateNo ratings yet
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranNo ratings yet
- DEFUZZDocument43 pagesDEFUZZsunilkumareceNo ratings yet
- Comparacion Ansys CFX y TelemacDocument8 pagesComparacion Ansys CFX y TelemacOscar Choque JaqquehuaNo ratings yet
- Signals and SystemsDocument69 pagesSignals and Systemsanand_kkrNo ratings yet
- Development of An Innovative Fireball Fire Extinguishing SystemDocument27 pagesDevelopment of An Innovative Fireball Fire Extinguishing SystemminhajNo ratings yet