You might also like
- Asme 2 EjDocument4 pagesAsme 2 EjMichael AjayiNo ratings yet
- Electronics Exercise 2: The 555 Timer and It's Applications: ObjectiveDocument5 pagesElectronics Exercise 2: The 555 Timer and It's Applications: ObjectiveMichael AjayiNo ratings yet
- Image Quality Analysis - AssignmentDocument11 pagesImage Quality Analysis - AssignmentMichael AjayiNo ratings yet
- 12 Rot 3x3 EngDocument11 pages12 Rot 3x3 EngMichael AjayiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- HP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoDocument4 pagesHP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoTanish JainNo ratings yet
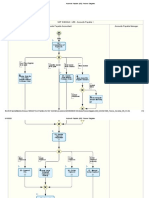
- Accounts Payable (J60) - Process DiagramsDocument16 pagesAccounts Payable (J60) - Process Diagramsgobasha100% (1)
- SF Current SchemaDocument158 pagesSF Current SchemaorafinconsultantNo ratings yet
- 3 - DHCP and Wireless Basic SecurityDocument3 pages3 - DHCP and Wireless Basic SecurityDmddldldldlNo ratings yet
- R-Net System R-Net System: Multi-Rehab Powerchair Control SystemDocument4 pagesR-Net System R-Net System: Multi-Rehab Powerchair Control SystemMikel VillanuevaNo ratings yet
- Hipaa Information and Consent FormDocument1 pageHipaa Information and Consent FormJake HennemanNo ratings yet
- Huawei AC6805 Wireless Access Controller Datasheet - 2Document16 pagesHuawei AC6805 Wireless Access Controller Datasheet - 2irfanNo ratings yet
- List ObjectDocument60 pagesList ObjectCRA Esuela Claudio ArrauNo ratings yet
- Try These: 1.4 Rational Numbers Between Two Rational NumbersDocument1 pageTry These: 1.4 Rational Numbers Between Two Rational NumbersLokendraNo ratings yet
- 012-NetNumen U31 R22 Northbound Interface User Guide (SNMP Interface)Document61 pages012-NetNumen U31 R22 Northbound Interface User Guide (SNMP Interface)buts101100% (5)
- Covenant UniversityDocument5 pagesCovenant UniversityWilkie MofeNo ratings yet
- Q3 Explain, How Much Can Business Intelligence and Business Analytics Help Companies Refine Their Business Strategy?Document7 pagesQ3 Explain, How Much Can Business Intelligence and Business Analytics Help Companies Refine Their Business Strategy?sandeep kumarNo ratings yet
- AcanDocument36 pagesAcanAlberto Ramon EspinolaNo ratings yet
- 2 2 2 2 2 2 "Enter The Elements of 1st Matrix/n": Int Float IntDocument12 pages2 2 2 2 2 2 "Enter The Elements of 1st Matrix/n": Int Float IntSagar SharmaNo ratings yet
- Battery Reliability Test System MODEL 17010Document12 pagesBattery Reliability Test System MODEL 17010G H.No ratings yet
- Hamidavi Et Al 2020 - Towards Intelligent Structural Design of Buildings ADocument15 pagesHamidavi Et Al 2020 - Towards Intelligent Structural Design of Buildings ARober Waldir Quispe UlloaNo ratings yet
- 121 A3 Apr 2019 PDFDocument4 pages121 A3 Apr 2019 PDFSudhakarNo ratings yet
- Oil and Gas Reloaded: Offshore ArgentinaDocument9 pagesOil and Gas Reloaded: Offshore ArgentinaMuhammad Fahmi AnbNo ratings yet
- Design App Themes With Theme EditorDocument4 pagesDesign App Themes With Theme Editorsenze_shin3No ratings yet
- 10 Challenges Facing Today's Applied Sport ScientistDocument7 pages10 Challenges Facing Today's Applied Sport ScientistDorian FigueroaNo ratings yet
- Proposal SampleDocument33 pagesProposal SampleMichael MesfinNo ratings yet
- Matlab 5Document38 pagesMatlab 5Shruti YashNo ratings yet
- Problem 5 Limocon, MelendezDocument24 pagesProblem 5 Limocon, MelendezMaria Angela MelendezNo ratings yet
- HP48 RepairsDocument7 pagesHP48 Repairsflgrhn100% (1)
- Virtual Reality and Innovation PotentialDocument10 pagesVirtual Reality and Innovation PotentialUmerFarooqNo ratings yet
- Can Internal Excellence Be Measured - DeshpandeDocument11 pagesCan Internal Excellence Be Measured - DeshpandeFelipeNo ratings yet
- Chapter 7 - Inheritance and InterfacesDocument53 pagesChapter 7 - Inheritance and Interfacesvicrattlehead2013No ratings yet
- B Cisco Nexus 9000 Series NX-OS System Management Configuration Guide 7x Chapter 011100Document16 pagesB Cisco Nexus 9000 Series NX-OS System Management Configuration Guide 7x Chapter 011100RiyanSahaNo ratings yet
- Detailed List and Syllabuses of Courses: Syrian Arab Republic Damascus UniversityDocument10 pagesDetailed List and Syllabuses of Courses: Syrian Arab Republic Damascus UniversitySedra MerkhanNo ratings yet
- 25+ Tricky SAP BODS Interview Questions 3Document1 page25+ Tricky SAP BODS Interview Questions 3pattabhikvNo ratings yet