You might also like
- Hazmat Transportation Training RequirementsDocument12 pagesHazmat Transportation Training RequirementsSafety IezzproNo ratings yet
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Solid Waste ManagementDocument12 pagesSolid Waste ManagementAmiteshAwasthiNo ratings yet
- Steam Power Plant1BoilerDocument21 pagesSteam Power Plant1BoilerJay Mark Cayonte100% (1)
- Lecture Notes - Linear Elasticity TheoryDocument43 pagesLecture Notes - Linear Elasticity Theoryzcapg17No ratings yet
- Mechanical VibrationDocument72 pagesMechanical VibrationMuhammadNasir100% (1)
- Computation of TR Line Parameters & ModellingDocument18 pagesComputation of TR Line Parameters & ModellingVibin NivasNo ratings yet
- Measurement of Vibration Using Piezoelectric SensorDocument7 pagesMeasurement of Vibration Using Piezoelectric SensorAnand RajNo ratings yet
- Power System Operation Guide: Load Curves, Forecasting & CommitmentDocument14 pagesPower System Operation Guide: Load Curves, Forecasting & Commitmentindhu.cs75% (4)
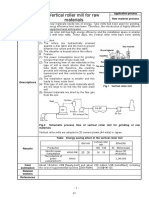
- Vertical Roller Mill For Raw MaterialsDocument63 pagesVertical Roller Mill For Raw Materialssajjad100% (1)
- Gasifier Thesis PDFDocument164 pagesGasifier Thesis PDFJohn Taulo100% (1)
- Mechanical Vibrations Week 1Document57 pagesMechanical Vibrations Week 1mrb87No ratings yet
- Study and Implementation of Object Detection and Visual TrackingDocument32 pagesStudy and Implementation of Object Detection and Visual TrackingBharat GiddwaniNo ratings yet
- Energy Audit Notes FinalDocument64 pagesEnergy Audit Notes FinalNaga Ananth100% (6)
- Text Editor Data Structure ComparisonDocument91 pagesText Editor Data Structure ComparisonglobalhodmechNo ratings yet
- Lab ReportDocument7 pagesLab Reportlesh allanoNo ratings yet
- Experiment 4: Design Comparator CircuitsDocument10 pagesExperiment 4: Design Comparator CircuitsNeekita ChamaneNo ratings yet
- Cisco CSS Basic Configuration GuideDocument484 pagesCisco CSS Basic Configuration GuideKumar Mukherjee-BiltuNo ratings yet
- Thevenin's Theorem Lab: Voltage, VDocument3 pagesThevenin's Theorem Lab: Voltage, VMd Johurul IslamNo ratings yet
- Mass Spring SystemDocument25 pagesMass Spring SystemKhoironSyamdatuNo ratings yet
- 9 Thevenin & Norton CircuitsDocument11 pages9 Thevenin & Norton CircuitsKhalidSa23No ratings yet
- Full Paper A PRAGMATIC ANALYSIS OF SPEECH ACTS IN MARGARET OGOLA'S THE RIVERDocument9 pagesFull Paper A PRAGMATIC ANALYSIS OF SPEECH ACTS IN MARGARET OGOLA'S THE RIVERBenita NicholasNo ratings yet
- Text EditorsDocument26 pagesText EditorsSachin VeerashettyNo ratings yet
- Smartening Up With Artificial Intelligence PDFDocument52 pagesSmartening Up With Artificial Intelligence PDFHWANG INBUMNo ratings yet
- RS579 - Computer Engineering Curriculum 2073 PDFDocument80 pagesRS579 - Computer Engineering Curriculum 2073 PDFreema yadav75% (8)
- Bitstream Group7Document6 pagesBitstream Group7Naina DasouniNo ratings yet
- Artificial Intelligence, Blockchain, and Internet of Medical Things: New Technologies in Detecting, Preventing, and Controlling of Emergent DiseasesDocument27 pagesArtificial Intelligence, Blockchain, and Internet of Medical Things: New Technologies in Detecting, Preventing, and Controlling of Emergent DiseasesVania V. EstrelaNo ratings yet
- PHY1331 Assignment 1 Solutions PDFDocument2 pagesPHY1331 Assignment 1 Solutions PDFLarissa83% (6)
- (Mass Spring System) : Department Course Name SemesterDocument9 pages(Mass Spring System) : Department Course Name SemesterMohammad AlshourbajeNo ratings yet
- Lecture On Fuzzy Logic ControlDocument87 pagesLecture On Fuzzy Logic ControlHEMANT KUMARNo ratings yet
- Research Paper On Basic of Artificial Neural NetworkDocument5 pagesResearch Paper On Basic of Artificial Neural NetworkEditor IJRITCCNo ratings yet
- (FINAL) Gas Leakage Detection With Buzzer System Using AtmegaDocument3 pages(FINAL) Gas Leakage Detection With Buzzer System Using AtmegaYash Kapure100% (2)
- Domino Effect AnalysisDocument16 pagesDomino Effect Analysisapi-270822363No ratings yet
- Promoting Safety Culture in Romanian Organizations As A Pillar of Occupational Health and Safety ManagementDocument8 pagesPromoting Safety Culture in Romanian Organizations As A Pillar of Occupational Health and Safety ManagementSEP-PublisherNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- Formal Report Lab 1Document11 pagesFormal Report Lab 1Mohan RyanNo ratings yet
- NPTEL - Mechanical Engineering - Vibration ControlDocument10 pagesNPTEL - Mechanical Engineering - Vibration Control8104772799No ratings yet
- AccelerometersDocument4 pagesAccelerometersఅయ్యలసోమయాజుల సాయి శివ100% (1)
- PPS Project ReportDocument7 pagesPPS Project ReportRITIK JAINNo ratings yet
- Experiment 1Document11 pagesExperiment 1Nurul Anati ZulkifliNo ratings yet
- Advanced Dynamics: Donald T. GreenwoodDocument24 pagesAdvanced Dynamics: Donald T. GreenwoodSasidhar JannuNo ratings yet
- Control 1 NotesDocument14 pagesControl 1 NotesGatheru NjorogeNo ratings yet
- Vibration Dynamics PDFDocument41 pagesVibration Dynamics PDFvbhvmht09No ratings yet
- Longitudinal Vibration BarsDocument83 pagesLongitudinal Vibration BarsGerson Cordoba Barco75% (4)
- DS - Lec 1Document7 pagesDS - Lec 1Sherif SaidNo ratings yet
- Measuring Spring Stiffness and Natural FrequencyDocument60 pagesMeasuring Spring Stiffness and Natural FrequencyRobert Lau Yik SiangNo ratings yet
- Discussion of The Improved Methods For Analyzing ADocument16 pagesDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliNo ratings yet
- Simple Pedulum Motion: General Physics Quastion SheetsDocument8 pagesSimple Pedulum Motion: General Physics Quastion SheetsShiun TungNo ratings yet
- Axioms of Quantum MechanicsDocument7 pagesAxioms of Quantum MechanicsAZIZ ALBAR ROFI'UDDAROJADNo ratings yet
- Mechanics of Rigid BodyDocument21 pagesMechanics of Rigid Bodyhenzel espinaNo ratings yet
- Mathematical Modeling of Control System Assignment NewDocument8 pagesMathematical Modeling of Control System Assignment NewJawad SandhuNo ratings yet
- Equations of MotionDocument6 pagesEquations of MotionDharshan KofiNo ratings yet
- Oscillations TheoryDocument10 pagesOscillations TheoryJoanna PanayiNo ratings yet
- PDF Dynamic Analysis of StructuresDocument43 pagesPDF Dynamic Analysis of StructuresChegue BureNo ratings yet
- Sample Physics Lab ReportDocument8 pagesSample Physics Lab ReportAnonymous zF7oT5GrNo ratings yet
- Vibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsDocument15 pagesVibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsMï XavierNo ratings yet
- Lab 4 Mass-Spring System - v3Document13 pagesLab 4 Mass-Spring System - v3sairafiNo ratings yet
- Basic Concepts On StaticsDocument6 pagesBasic Concepts On Staticsmzairun100% (2)
- Motion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumDocument6 pagesMotion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumnasirfahimNo ratings yet
- Physics 11 Word.Document23 pagesPhysics 11 Word.Michael John C UrpianoNo ratings yet
- Dynamics CourseworkDocument9 pagesDynamics CourseworkRodney MensahNo ratings yet
- Static's Lecture 1-5 2Document121 pagesStatic's Lecture 1-5 2HaadS.AbbasiNo ratings yet
- Angular Momentum Course HandoutDocument29 pagesAngular Momentum Course HandoutAtif ImamNo ratings yet
- Linear Impulse and Momentum PrinciplesDocument17 pagesLinear Impulse and Momentum PrinciplesVinot EsanNo ratings yet
- Experiment 104 Torque: 2 Condition of Equilibrium: PhysicsDocument4 pagesExperiment 104 Torque: 2 Condition of Equilibrium: PhysicsJag MasterNo ratings yet
- SEEX1016 L T P Credits Total Marks 3 0 0 3 100: (Common To EEE and E&C)Document132 pagesSEEX1016 L T P Credits Total Marks 3 0 0 3 100: (Common To EEE and E&C)Suman MajumderNo ratings yet
- Model: ZR72KCE-TFD: Technical DataDocument9 pagesModel: ZR72KCE-TFD: Technical DataZakiFroidNo ratings yet
- GENERATING ELECTRICITYDocument34 pagesGENERATING ELECTRICITYAdeniji OlusegunNo ratings yet
- Faizan ResumeDocument3 pagesFaizan ResumeFaizanNo ratings yet
- SD 0100CT1502 Sec-06Document18 pagesSD 0100CT1502 Sec-06royvindasNo ratings yet
- BP Holstein Field & Platform TopsidesDocument2 pagesBP Holstein Field & Platform Topsidesbayboy75No ratings yet
- Fuel Cells On AerospaceDocument4 pagesFuel Cells On Aerospacevvtarun50% (2)
- Technical and Economic Impacts of Distributed Generation On Distribution SystemDocument5 pagesTechnical and Economic Impacts of Distributed Generation On Distribution Systemआश्विन मरहट्टाNo ratings yet
- Breaking The Myths of Nuclear Energy:Dr.D.N.Sharma, Member, NDMADocument3 pagesBreaking The Myths of Nuclear Energy:Dr.D.N.Sharma, Member, NDMANdma IndiaNo ratings yet
- ATB - GROUP BROCHURE RENEWABLES Small - WindDocument8 pagesATB - GROUP BROCHURE RENEWABLES Small - WindT Tryhard FnNo ratings yet
- Heliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDocument4 pagesHeliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDeepan MNo ratings yet
- Lab ManualDocument6 pagesLab ManualAnshikha NautiyalNo ratings yet
- How To Make A 220V To 110V Converter Circuit - Homemade Circuit ProjectsDocument1 pageHow To Make A 220V To 110V Converter Circuit - Homemade Circuit ProjectsChanna PrasadNo ratings yet
- 700-HG Power Relay: - Description Contact Ratings Wiring Diagrams Coil Voltage Cat. NoDocument1 page700-HG Power Relay: - Description Contact Ratings Wiring Diagrams Coil Voltage Cat. NoArif KhanNo ratings yet
- Energy, Work & Power 09 QPDocument10 pagesEnergy, Work & Power 09 QPRahat RizwanNo ratings yet
- DCE Biodiesel Information BrochureDocument10 pagesDCE Biodiesel Information BrochureIshwar ChandraNo ratings yet
- Process Guide: TechnipDocument3 pagesProcess Guide: TechnipДмитрий ГоршковNo ratings yet
- Chapter 12-Heating, Air Conditioning, and Ventilating: 1 Healthy Housing Reference ManualDocument21 pagesChapter 12-Heating, Air Conditioning, and Ventilating: 1 Healthy Housing Reference ManuallmelendeziNo ratings yet
- List of FINAL TOPICS 23-24 N-SBDocument9 pagesList of FINAL TOPICS 23-24 N-SBAkashdeep Sunil WaghmareNo ratings yet
- 220MW Turbine Generator Technical SpecificationDocument9 pages220MW Turbine Generator Technical SpecificationOry'sSebayangNo ratings yet
- Pamilacan IslandDocument4 pagesPamilacan IslandRogen QuibolNo ratings yet
- 93 Physics MCQ and Answers IAS ExamDocument73 pages93 Physics MCQ and Answers IAS Examnsvasanthasena89% (47)
- Inverter Selection GuideDocument8 pagesInverter Selection GuideboisNo ratings yet
- Catalogue - Central Battery SystemDocument12 pagesCatalogue - Central Battery SystemarifzakirNo ratings yet