You might also like
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodFrom EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodNo ratings yet
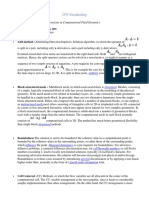
- CFD VocabularyDocument10 pagesCFD VocabularyAmir LachrafNo ratings yet
- A Comparitive Study of FVM and FDMDocument7 pagesA Comparitive Study of FVM and FDMHassan AbdelmoamenNo ratings yet
- 3.1 Governing Equations: Numerical MethodologyDocument8 pages3.1 Governing Equations: Numerical MethodologyChethan_Srinivas2404No ratings yet
- Assignment 2 PDFDocument14 pagesAssignment 2 PDFChinmay GosaviNo ratings yet
- Fluid CFD ReportDocument5 pagesFluid CFD Reportjawad khalidNo ratings yet
- Chapter 5 CFDDocument12 pagesChapter 5 CFDvadiyalaNo ratings yet
- MECH3780 Fluid Mechanics 2 and CFDDocument14 pagesMECH3780 Fluid Mechanics 2 and CFDninibearNo ratings yet
- Normalized Variable and Space Formulation MethodolDocument29 pagesNormalized Variable and Space Formulation MethodolCleuber EduardoNo ratings yet
- NHT 2023Document11 pagesNHT 2023Bishwajit MajiNo ratings yet
- UNIT NO 1: Finite Difference SchemesDocument9 pagesUNIT NO 1: Finite Difference SchemesAbhishek SaxenaNo ratings yet
- CFD Mini ProjectDocument11 pagesCFD Mini ProjectSujay PrabhatNo ratings yet
- Finite Volume MethodDocument29 pagesFinite Volume MethodHa Nam TranNo ratings yet
- Local Discontinuous Galerkin Methods For High-Order Time-Dependent Partial Differential EquationsDocument57 pagesLocal Discontinuous Galerkin Methods For High-Order Time-Dependent Partial Differential EquationsAman JalanNo ratings yet
- Innovsail 2010 PDFDocument6 pagesInnovsail 2010 PDFtsaipeterNo ratings yet
- Computational Fluid Dynamics ProjectDocument37 pagesComputational Fluid Dynamics ProjectArvindNo ratings yet
- Efficient Construction of Discrete Adjoint Operators On Unstructured Grids by Using Complex VariablesDocument15 pagesEfficient Construction of Discrete Adjoint Operators On Unstructured Grids by Using Complex Variables35- Nava GeraldineNo ratings yet
- 1 s2.0 S0377042720301631 MainDocument14 pages1 s2.0 S0377042720301631 Mainmat20d002No ratings yet
- Ding-Shu (JCP 2005)Document24 pagesDing-Shu (JCP 2005)Hamid MojiryNo ratings yet
- Parameter Preserving Model Order Reduction of A Flow MeterDocument4 pagesParameter Preserving Model Order Reduction of A Flow MeterbobehabNo ratings yet
- c34 ECM MBI PDFDocument55 pagesc34 ECM MBI PDFThangadurai Senthil Ram PrabhuNo ratings yet
- Etapas de CFD - AnsysDocument12 pagesEtapas de CFD - AnsysGabriel NogueiraNo ratings yet
- A Brief Description of These MethodsDocument6 pagesA Brief Description of These MethodsQi PanNo ratings yet
- Comparative StudyDocument12 pagesComparative StudyAvinash VasudeoNo ratings yet
- 2018, Article, Development of A Coupled Matrix-Free LU-SGS Solver For Turbulent Compressible FlowsDocument8 pages2018, Article, Development of A Coupled Matrix-Free LU-SGS Solver For Turbulent Compressible FlowsAnıl KüçükNo ratings yet
- TMMV08 A1 2024Document9 pagesTMMV08 A1 2024adityaNo ratings yet
- A New Approach To Compuatational Turbulence ModellingDocument22 pagesA New Approach To Compuatational Turbulence Modellinggokuler137No ratings yet
- 1 s2.0 S0021999124000688 MainDocument27 pages1 s2.0 S0021999124000688 MainIndir JaganjacNo ratings yet
- Difference Between FEM FDM and FVMDocument5 pagesDifference Between FEM FDM and FVMRafael Santos RoqueNo ratings yet
- Society For Industrial and Applied Mathematics Is Collaborating With JSTOR To Digitize, Preserve and ExtendDocument30 pagesSociety For Industrial and Applied Mathematics Is Collaborating With JSTOR To Digitize, Preserve and ExtendNoraziah AdzharNo ratings yet
- A Fully Coupled Finite Volume Solver For The Solution of Incompressible Flows On Locally Refined Non-Matching Block-Structured GridsDocument12 pagesA Fully Coupled Finite Volume Solver For The Solution of Incompressible Flows On Locally Refined Non-Matching Block-Structured GridsErnesto Delfino AguirreNo ratings yet
- Introduction To Computational Fluid DynamicsDocument3 pagesIntroduction To Computational Fluid DynamicsJonyzhitop TenorioNo ratings yet
- The Shallow Water Equations An Example of Hyperbolic SystemDocument32 pagesThe Shallow Water Equations An Example of Hyperbolic SystemChibaka WarsNo ratings yet
- Computational Fluid Dynamics (CFD)Document4 pagesComputational Fluid Dynamics (CFD)Rushikesh attardeNo ratings yet
- FluidDocument1 pageFluidAdil MahmudNo ratings yet
- CFD PDFDocument45 pagesCFD PDFKuba RaNo ratings yet
- Detals of Steps:: Finite Element Analysis SolverDocument6 pagesDetals of Steps:: Finite Element Analysis SolverZia AhmedNo ratings yet
- J-HXfer Meshless ConjugateDocument13 pagesJ-HXfer Meshless Conjugatebardock277No ratings yet
- A Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaoDocument32 pagesA Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaowatersakanaNo ratings yet
- FVM PresentationDocument33 pagesFVM PresentationManas Manoj RedijNo ratings yet
- Lecture5&6 CFD Course Discretization-21Sept2001Document89 pagesLecture5&6 CFD Course Discretization-21Sept2001vibhor28100% (3)
- RS FV PavanetalDocument23 pagesRS FV PavanetalprabhuNo ratings yet
- Choosing The Right Turbulence Model For Your CFD S PDFDocument6 pagesChoosing The Right Turbulence Model For Your CFD S PDFMaxNo ratings yet
- Aeroelasticity Calculations Using A Finite Element Method: 2.1. Fluid AnalysisDocument7 pagesAeroelasticity Calculations Using A Finite Element Method: 2.1. Fluid Analysisr1733No ratings yet
- Anisotropic Grid Adaptation For Rans Simulation of A Fast Manoeuvering Catamaran PDFDocument9 pagesAnisotropic Grid Adaptation For Rans Simulation of A Fast Manoeuvering Catamaran PDFtsaipeterNo ratings yet
- Final SolutionDocument27 pagesFinal SolutionAugustine WuNo ratings yet
- Sparse Approximate Inverses For Preconditioning, Smoothing, and RegularizationDocument247 pagesSparse Approximate Inverses For Preconditioning, Smoothing, and RegularizationmartinoidarNo ratings yet
- Salvetti EtalDocument18 pagesSalvetti Etalyoussef_pcNo ratings yet
- Example-Steady Incompressible Flow: Solved With Comsol Multiphysics 3.5ADocument14 pagesExample-Steady Incompressible Flow: Solved With Comsol Multiphysics 3.5AGabotecnaNo ratings yet
- AIAA 2013 2567 CharestDocument21 pagesAIAA 2013 2567 Charestapoorvs75No ratings yet
- Ansys Lab ManualDocument87 pagesAnsys Lab Manualaravind174No ratings yet
- Icfd10 Eg 30i1Document8 pagesIcfd10 Eg 30i1NextScribeNo ratings yet
- On The Accuracy of Finite Difference Solutions For Nonlinear Water WavesDocument28 pagesOn The Accuracy of Finite Difference Solutions For Nonlinear Water WavesMed Ali MaatougNo ratings yet
- Implicit-Explicit Parallel Asynchronous Solver of Parabolic PdesDocument41 pagesImplicit-Explicit Parallel Asynchronous Solver of Parabolic PdestsocaciuNo ratings yet
- Deconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DateDocument36 pagesDeconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DatesahibhaiNo ratings yet
- Trust and Quality in CFDDocument6 pagesTrust and Quality in CFDpfylNo ratings yet
- Put More Punch Into Catalytic ReactorsDocument6 pagesPut More Punch Into Catalytic Reactorspolaris44No ratings yet
- Computational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringFrom EverandComputational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringNo ratings yet
- NewpptmmsDocument28 pagesNewpptmmsVaibhav Jain0% (1)
- Body Mounting Manual: KK-GH214Document264 pagesBody Mounting Manual: KK-GH214locario1No ratings yet
- Apf188088 enDocument130 pagesApf188088 enJavier LópezNo ratings yet
- List Equipment Pltu Pangkalan Susu 2x200mwDocument7 pagesList Equipment Pltu Pangkalan Susu 2x200mwDanny SurbaktiNo ratings yet
- Ip060-45!20!02 Orifice Plate Assembly (Buyer's Scope)Document5 pagesIp060-45!20!02 Orifice Plate Assembly (Buyer's Scope)Rahul DevaNo ratings yet
- Asiatech Development & Builders (Adb) Corporation: Concrete Pouring ChecklistDocument1 pageAsiatech Development & Builders (Adb) Corporation: Concrete Pouring ChecklistGenevieve GayosoNo ratings yet
- Compact-Line - Operating Manual 83000102.Kf PDFDocument77 pagesCompact-Line - Operating Manual 83000102.Kf PDFIsabelo RodriguezNo ratings yet
- F56449 and F56450 Recommended Parts Per Maintenance IntervalDocument31 pagesF56449 and F56450 Recommended Parts Per Maintenance Intervalanwar sadatNo ratings yet
- DBR ChecklistDocument9 pagesDBR ChecklistJai ThakkarNo ratings yet
- Pump & Motor Catalog: Aluminum Bushing SeriesDocument116 pagesPump & Motor Catalog: Aluminum Bushing SeriesMario SouzaNo ratings yet
- BS 7448-3 - 2005 (2007)Document62 pagesBS 7448-3 - 2005 (2007)Артем ТитовNo ratings yet
- Turcon Glyd Ring T: Double Acting Rubber Energized Plastic Faced SealDocument14 pagesTurcon Glyd Ring T: Double Acting Rubber Energized Plastic Faced SealPhong DuongNo ratings yet
- 2011 Land Rover Range Rover SpecsDocument4 pages2011 Land Rover Range Rover Specssportutilityvehicle100% (1)
- CT - 100 - SPC - Rev01 Mar 2015Document67 pagesCT - 100 - SPC - Rev01 Mar 2015Ittoop and sons AutomobileNo ratings yet
- 72 Olympique (Owners Manual)Document40 pages72 Olympique (Owners Manual)JacobnMarie LaaksoNo ratings yet
- Uav Introduction 4Document10 pagesUav Introduction 4Vijayanandh RNo ratings yet
- Power Industry Appl GuideDocument38 pagesPower Industry Appl GuidePetrovich1No ratings yet
- Astm E111-97Document7 pagesAstm E111-97Uri Sterin100% (2)
- IDOT 2020 Bridge Design Updates - Steel Analysis and Cross-Frame DetailsDocument50 pagesIDOT 2020 Bridge Design Updates - Steel Analysis and Cross-Frame DetailsJoe AndrewsNo ratings yet
- Mohr's Circle Part 3Document6 pagesMohr's Circle Part 3zidaaanNo ratings yet
- Proiect Lemn - Facultatea de Constructii IasiDocument24 pagesProiect Lemn - Facultatea de Constructii IasiIordana-Paula ManoleNo ratings yet
- Pulsar 150 Ug4 MAY 14Document75 pagesPulsar 150 Ug4 MAY 14Nadeem AnsariNo ratings yet
- MATERIALS AND CONSTRUCTION ArunachalamDocument6 pagesMATERIALS AND CONSTRUCTION Arunachalamdharanya sivabalanNo ratings yet
- Nota RobotDocument26 pagesNota RobotpnroslindaNo ratings yet
- A Report On Compliant MechanismsDocument22 pagesA Report On Compliant MechanismsRajesh Shyamrao KajeNo ratings yet
- Direct Inj L9707 Nissan PatrolDocument36 pagesDirect Inj L9707 Nissan PatrolRouba YounesNo ratings yet
- FDB Torsion2aDocument3 pagesFDB Torsion2aVon Oliver RosarioNo ratings yet
- Catalog Aparate LEISTER Sudare PlasticDocument38 pagesCatalog Aparate LEISTER Sudare PlasticAnonymous DytNol3No ratings yet
- Fin Plate To Column Flange - LRFDDocument23 pagesFin Plate To Column Flange - LRFDkalpanaadhiNo ratings yet
- Manuale MecwayDocument141 pagesManuale MecwayD BNo ratings yet