You might also like
- Chp6 Interrupt - StacknewDocument11 pagesChp6 Interrupt - Stacknewheyfiez12No ratings yet
- CSC159 Ch5 Interfacing and CommunicationDocument19 pagesCSC159 Ch5 Interfacing and CommunicationmaiyonisNo ratings yet
- Real Time Computing and Programming - IntroDocument19 pagesReal Time Computing and Programming - IntroNon ArtistsNo ratings yet
- Chp6 Interrupt - StackDocument12 pagesChp6 Interrupt - StackNur AfiqahNo ratings yet
- CSC 205 - 2 Instruction Processing 2023-2024Document35 pagesCSC 205 - 2 Instruction Processing 2023-2024hahnonimusNo ratings yet
- Interrupt ChapterDocument24 pagesInterrupt ChapterBTS Army 방탄소년단No ratings yet
- Top Level View of Computer Function and InterconnectionDocument38 pagesTop Level View of Computer Function and Interconnectionhsi3No ratings yet
- OS notes.docxDocument39 pagesOS notes.docxpalkisbeevi25No ratings yet
- CPU Organization ModifiedDocument68 pagesCPU Organization ModifiedAbdalrhman juberNo ratings yet
- InterruptsDocument49 pagesInterrupts1099 Pari BodanaNo ratings yet
- AyilaraDocument13 pagesAyilaraAremu FaisalNo ratings yet
- Interrupt Handling ExplainedDocument8 pagesInterrupt Handling ExplainedSreekanth PagadapalliNo ratings yet
- Lec 3 - Top View of SystemDocument11 pagesLec 3 - Top View of SystemKimani MaithyaNo ratings yet
- InterruptsDocument27 pagesInterruptsanayaNo ratings yet
- Chapter 1: Intro: 1.1 What Operating Systems DoDocument10 pagesChapter 1: Intro: 1.1 What Operating Systems DoBraiden MaggiaNo ratings yet
- Lesson6 Input and Output Devices and InterruptsDocument3 pagesLesson6 Input and Output Devices and Interruptsleonard thuoNo ratings yet
- Unit 2Document48 pagesUnit 2Rohan MehraNo ratings yet
- CSVTU Operating System Unit 1Document43 pagesCSVTU Operating System Unit 1Kapil NagwanshiNo ratings yet
- Computer Function: 1. Reading (Fetching) Instruction From Memory by CPU 2. Execution of Each Fetched InstructionDocument19 pagesComputer Function: 1. Reading (Fetching) Instruction From Memory by CPU 2. Execution of Each Fetched Instructiondomainname9No ratings yet
- Operating SystemDocument103 pagesOperating SystemYUVRAJ WAGH100% (1)
- Interrupts PDFDocument8 pagesInterrupts PDFFarhan SamsuddinNo ratings yet
- Module 1 - OSDocument79 pagesModule 1 - OSSAI PRATHEESH R JUNo ratings yet
- Operating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Document5 pagesOperating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Michael Beswick0% (1)
- OS Introduction - Part 2Document44 pagesOS Introduction - Part 221PC12 - GOKUL DNo ratings yet
- Operating System Module 5-Lecture 8: I/O HardwareDocument10 pagesOperating System Module 5-Lecture 8: I/O HardwareBiswas LecturesNo ratings yet
- Chapter - 1Document11 pagesChapter - 1Harshada BavaleNo ratings yet
- Interrupt vs Exception: Key DifferencesDocument12 pagesInterrupt vs Exception: Key DifferencesBAL KRISHNA PANDEYNo ratings yet
- Os Ut1 QaDocument7 pagesOs Ut1 QaVignesh RaghavareddyNo ratings yet
- Scheduling Is A Fundamental Operating System FunctionDocument6 pagesScheduling Is A Fundamental Operating System FunctionRaja RamNo ratings yet
- Lecture # 03Document18 pagesLecture # 03unzilarauf39No ratings yet
- Interrupts: For Example Let Us Take A Task That Involves Two ActivitiesDocument6 pagesInterrupts: For Example Let Us Take A Task That Involves Two ActivitiesAMAN NIKHRANo ratings yet
- Good Material OSDocument103 pagesGood Material OSKarthik SekharNo ratings yet
- Pavitran A/L Pupathe (A170632) Assignment 2: Functions of Device DriversDocument7 pagesPavitran A/L Pupathe (A170632) Assignment 2: Functions of Device DriversPavitran NeymarNo ratings yet
- EvolutionDocument8 pagesEvolutiontomasinaNo ratings yet
- Purva Gautam 20184014 CS-B: OS Assignment 1 (Theory)Document5 pagesPurva Gautam 20184014 CS-B: OS Assignment 1 (Theory)Jay ZNo ratings yet
- UntitledDocument5 pagesUntitledritikNo ratings yet
- Co Notes Module 1Document42 pagesCo Notes Module 1Vinyas M SNo ratings yet
- Unit 5 ErtosDocument28 pagesUnit 5 ErtosAbhi VarmaNo ratings yet
- OS I/O Systems OverviewDocument24 pagesOS I/O Systems OverviewKapil NagwanshiNo ratings yet
- CS 303 Chapter 1, Lecture 2Document16 pagesCS 303 Chapter 1, Lecture 2HARSH MITTALNo ratings yet
- InterruptDocument13 pagesInterruptاسيا عكاب يوسف زغير صباحيNo ratings yet
- OS Support Functions and ServicesDocument65 pagesOS Support Functions and ServicesSadiholicNo ratings yet
- CS1253 2,16marksDocument24 pagesCS1253 2,16marksRevathi RevaNo ratings yet
- STW120CT Computer Architecture and Networks: (Instruction Pipelining)Document24 pagesSTW120CT Computer Architecture and Networks: (Instruction Pipelining)BJ AcharyaNo ratings yet
- 1 OS LectureDocument33 pages1 OS LectureHabtie TesfahunNo ratings yet
- Module 3, Notes PDFDocument17 pagesModule 3, Notes PDFShankar MNo ratings yet
- OS LEcture 2Document39 pagesOS LEcture 2edwardalonzo0723No ratings yet
- Exceptional Control FlowDocument45 pagesExceptional Control Flowabdulkerimaragaw936No ratings yet
- Chapter 2Document20 pagesChapter 2esubalew sintieNo ratings yet
- Everything about Hardware and Software InterruptsDocument14 pagesEverything about Hardware and Software InterruptsC H A R A NNo ratings yet
- OS Evolution Batch ProcessingDocument20 pagesOS Evolution Batch ProcessingJeet NakraniNo ratings yet
- Unit 1Document38 pagesUnit 1Bijal patelNo ratings yet
- Lecture1 2 3Document40 pagesLecture1 2 3Prince AliNo ratings yet
- Mohamed Abdelrahman Anwar - 20011634 - Sheet 2Document15 pagesMohamed Abdelrahman Anwar - 20011634 - Sheet 2mohamed abdalrahmanNo ratings yet
- Computer System OrganizationDocument61 pagesComputer System OrganizationRonald DomingoNo ratings yet
- Unit 3Document15 pagesUnit 3SIT127- TIWARI KUNALNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- 68000 ISA Lecture and Instruction SetDocument25 pages68000 ISA Lecture and Instruction SetFaisal MahmoodNo ratings yet
- Amoozesh Mabani PLCDocument79 pagesAmoozesh Mabani PLCحمیدرضا حاجی علیانیNo ratings yet
- Make Voice Calls with Arduino and GSM ModuleDocument14 pagesMake Voice Calls with Arduino and GSM ModuleAnil RaghuvaranNo ratings yet
- Vivo AiO V221ID - All-in-One PCs - ASUS GlobalDocument4 pagesVivo AiO V221ID - All-in-One PCs - ASUS GlobalJuan Carlos HernandezNo ratings yet
- Lsm9Ds1: iNEMO Inertial Module: 3D Accelerometer, 3D Gyroscope, 3D MagnetometerDocument72 pagesLsm9Ds1: iNEMO Inertial Module: 3D Accelerometer, 3D Gyroscope, 3D MagnetometernomansnNo ratings yet
- Assignment 10Document6 pagesAssignment 10dasari_reddyNo ratings yet
- Oracle X86 Server Installation Specialist Online Assessment (2022)Document7 pagesOracle X86 Server Installation Specialist Online Assessment (2022)uj stevNo ratings yet
- Sample Resume Skills For Computer Hardware and Networking ProfessionalDocument5 pagesSample Resume Skills For Computer Hardware and Networking ProfessionalDeena Dayalan100% (1)
- Dell Latitude 7420 14 InchDocument3 pagesDell Latitude 7420 14 InchAto AnsoriNo ratings yet
- SG TravelMate 8471 8431 200908131Document94 pagesSG TravelMate 8471 8431 200908131oralbnetworkNo ratings yet
- Abhishek ResumeDocument3 pagesAbhishek Resumesantosh_maniNo ratings yet
- Truechip AMBA 2AHB3 Verification IPDocument2 pagesTruechip AMBA 2AHB3 Verification IPNaveed BeighNo ratings yet
- 5890 X ManualDocument8 pages5890 X ManualZener Garcia CedroNo ratings yet
- 3v3 ArduinoDocument1 page3v3 ArduinoLalmuanpuiaRalteNo ratings yet
- HUAWEI Tecal E6000 ServerDocument2 pagesHUAWEI Tecal E6000 ServerEmmanuel ArenasNo ratings yet
- Elements of A Computer and Communication SystemDocument3 pagesElements of A Computer and Communication SystemArmando Mendoza JrNo ratings yet
- Computer Components and ItDocument8 pagesComputer Components and ItIzzarat AliNo ratings yet
- Computer-Basics - Computer Basics2Document43 pagesComputer-Basics - Computer Basics2api-216226726No ratings yet
- DX DiagDocument48 pagesDX DiagÁlefe TorquatoNo ratings yet
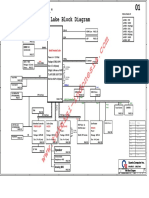
- Intel Gemini Lake Block Diagram EJ-11 ZHE 11"Document37 pagesIntel Gemini Lake Block Diagram EJ-11 ZHE 11"Tomy Aditya PratamaNo ratings yet
- b200-b210 Spec SheetDocument2 pagesb200-b210 Spec SheetHolger GäblerNo ratings yet
- Assembly and Disassembly of A Personal ComputerDocument18 pagesAssembly and Disassembly of A Personal Computerkimidors14356% (9)
- E560 CMG10 CSDocument8 pagesE560 CMG10 CSYasser RagabNo ratings yet
- ASKVideo Cubase 5 Tutorial DVDDocument6 pagesASKVideo Cubase 5 Tutorial DVDjonathan100% (1)
- Introduction To PLC: Experiment NoDocument9 pagesIntroduction To PLC: Experiment NoAkram AzharNo ratings yet
- Embedded Design TradeoffsDocument88 pagesEmbedded Design Tradeoffsabbazh rakhondeNo ratings yet
- Computer Plus CableDocument1 pageComputer Plus CableNETWORK ADMINNo ratings yet
- Technical Specifications of an Industrial DCS SystemDocument12 pagesTechnical Specifications of an Industrial DCS SystemMahesh ChaudhariNo ratings yet
- A400CG EE Trouble ShootingDocument40 pagesA400CG EE Trouble ShootingFreddy ArmstrongNo ratings yet
- RTC-based digital calendar in 40 charactersDocument6 pagesRTC-based digital calendar in 40 charactersSalman HaiderNo ratings yet