You might also like
- Introduction Static ForceDocument35 pagesIntroduction Static ForceSurya VenkatramanNo ratings yet
- Study Package On Newtons Law of MotionDocument59 pagesStudy Package On Newtons Law of MotionApex Institute67% (3)
- The Laws of Motion StaticsDocument12 pagesThe Laws of Motion StaticsJoegeNo ratings yet
- Statics - Force SystemDocument4 pagesStatics - Force SystemReynald RenzNo ratings yet
- DomDocument151 pagesDomvenkateshyadav2116No ratings yet
- Mech223 - Unit 1 and 2 Lecture CompilationDocument17 pagesMech223 - Unit 1 and 2 Lecture CompilationVanessa LuceroNo ratings yet
- Study Material Force & Laws of Motion For AIEEEDocument46 pagesStudy Material Force & Laws of Motion For AIEEEApex Institute100% (1)
- Assignment 1Document5 pagesAssignment 1qmjcmarquezNo ratings yet
- 10-10 Static Equilibrium: Answer To Essential Question 10.9: A Familiar Example Is A Figure Skater Who Spins RelativelyDocument2 pages10-10 Static Equilibrium: Answer To Essential Question 10.9: A Familiar Example Is A Figure Skater Who Spins RelativelyAtul SharmaNo ratings yet
- Engg. MechanicsDocument29 pagesEngg. MechanicsSunand Pongurlekar100% (1)
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNo ratings yet
- Unit-1 One MarksDocument6 pagesUnit-1 One MarksShri RahulNo ratings yet
- Engineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraDocument14 pagesEngineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraSathiyaseelan SubramaniNo ratings yet
- Determining Support Reactions of BeamsDocument15 pagesDetermining Support Reactions of BeamsAkash GolwalkarNo ratings yet
- Two Marks Engineering Mechanics Question BankDocument5 pagesTwo Marks Engineering Mechanics Question BankSiva VadeNo ratings yet
- Engineering Mechanics - Lecture Note 1Document33 pagesEngineering Mechanics - Lecture Note 1Tanu RdNo ratings yet
- Week 10 KineticsDocument24 pagesWeek 10 Kineticsiwhy_No ratings yet
- Mechanics Lab1Document7 pagesMechanics Lab1yogendra kumarNo ratings yet
- Engineering Mechanics: Dr. T.Meena, Associate Professor, Structural and Geotechnical Division, SMBS, Vit, VelloreDocument36 pagesEngineering Mechanics: Dr. T.Meena, Associate Professor, Structural and Geotechnical Division, SMBS, Vit, VelloreSiva ChandhiranNo ratings yet
- General Physics I Essay by Farid MammadovDocument24 pagesGeneral Physics I Essay by Farid MammadovФарид МамедовNo ratings yet
- Unit-1 FMEDocument59 pagesUnit-1 FMEAshish KhariNo ratings yet
- تقرير الميكانيكDocument11 pagesتقرير الميكانيكfatiman333333No ratings yet
- Newton's Laws0Document74 pagesNewton's Laws0K.s. BalajiNo ratings yet
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologyaliNo ratings yet
- Assignment StaticDocument24 pagesAssignment StaticSuhayl AzminNo ratings yet
- NLM UnacademyDocument45 pagesNLM UnacademyMusical DJNo ratings yet
- DynamicsDocument26 pagesDynamicschimdesa TolesaNo ratings yet
- statics of rigid bodies (1)Document14 pagesstatics of rigid bodies (1)Mariya MariyaNo ratings yet
- Rotational Motion and Angular MomentumDocument10 pagesRotational Motion and Angular MomentumKriti SrivastavaNo ratings yet
- 19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDDocument71 pages19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDVanHieu LuyenNo ratings yet
- Chapter 1 - Force Systems - Part ADocument14 pagesChapter 1 - Force Systems - Part ACheong JkNo ratings yet
- Statics Note Dawit's PDFDocument59 pagesStatics Note Dawit's PDFDawit GebrehanaNo ratings yet
- Structural Analysis for Architects: An IntroductionDocument82 pagesStructural Analysis for Architects: An IntroductionALAWI SSEKUBUNGANo ratings yet
- Newton's Laws of Motion ExplainedDocument13 pagesNewton's Laws of Motion ExplainedChinmay SharmaNo ratings yet
- Dynamics Summary NotesDocument7 pagesDynamics Summary NotesArlo SeasenNo ratings yet
- Lecture 3 Particle Kinetics OKDocument48 pagesLecture 3 Particle Kinetics OKTất ThànhNo ratings yet
- System of Particles and Rotational MotionDocument12 pagesSystem of Particles and Rotational MotionMâñøj Thę ŠtrįkėrNo ratings yet
- Mechanics PortionDocument55 pagesMechanics PortionRupak MandalNo ratings yet
- Mechanical VibrationDocument72 pagesMechanical VibrationMuhammadNasir100% (1)
- Engineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringDocument18 pagesEngineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringAli aliraqiNo ratings yet
- Addis Ababa University Faculty of Technology Department of Civil EngineeringDocument63 pagesAddis Ababa University Faculty of Technology Department of Civil EngineeringZi BogaleNo ratings yet
- Principles of DynamicsDocument7 pagesPrinciples of DynamicsNhezlee AlegreNo ratings yet
- Mechanics Fundamental ConceptsDocument19 pagesMechanics Fundamental Conceptsmsi appleNo ratings yet
- Physics CH - 3Document49 pagesPhysics CH - 3Prasanna VijayakumarNo ratings yet
- Principles of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesDocument34 pagesPrinciples of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesDaniella SabacNo ratings yet
- EquilibriumDocument40 pagesEquilibriumJeremy MacalaladNo ratings yet
- نموذج1Document11 pagesنموذج1kikk59967No ratings yet
- Further MechanicsDocument11 pagesFurther MechanicsBecky TenneyNo ratings yet
- Rigid bodies and vector quantitiesDocument11 pagesRigid bodies and vector quantitiesمنتظر محمدNo ratings yet
- EMECH 2 MarksDocument18 pagesEMECH 2 MarkspavanraneNo ratings yet
- Unit-1&2 Engineering MechanicsDocument15 pagesUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanNo ratings yet
- EM Chapter 1Document15 pagesEM Chapter 1Mahesh BahadareNo ratings yet
- New Module 1 MechanicsDocument23 pagesNew Module 1 MechanicsGARAY, EUGENIONo ratings yet
- GE6253 - 2 Mark Question Engineering MechanicsDocument6 pagesGE6253 - 2 Mark Question Engineering MechanicsstkrNo ratings yet
- 3RD Year Es1 NotesDocument9 pages3RD Year Es1 NotesMiguel MarcoNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- I Usually Visit To Mall Del Sol Shopping CentreDocument1 pageI Usually Visit To Mall Del Sol Shopping CentreRichard VillónNo ratings yet
- Past Simple or Past ContinuousDocument3 pagesPast Simple or Past ContinuousMarta BenciniNo ratings yet
- Ijest Vol1 No1 pp.1 15Document15 pagesIjest Vol1 No1 pp.1 15prabhjot singh1No ratings yet
- Mat Ing EXAMEN 2 V1Document8 pagesMat Ing EXAMEN 2 V1Richard VillónNo ratings yet
- DWG TrueView DWG Convert Conversion ReportDocument1 pageDWG TrueView DWG Convert Conversion ReportCosmin CinciNo ratings yet
- Proyecto Transferencia de Calor 2Document1 pageProyecto Transferencia de Calor 2Michael WhitakerNo ratings yet
- Cable To Steel or Cast Iron, Cathodic: W Ca XX X XX LH XX L MDocument2 pagesCable To Steel or Cast Iron, Cathodic: W Ca XX X XX LH XX L MRichard VillónNo ratings yet
- Curva de CalorDocument1 pageCurva de CalorBrandon CaldwellNo ratings yet
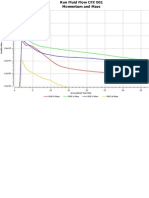
- Momemtum and Mass ResidualDocument1 pageMomemtum and Mass ResidualMichael WhitakerNo ratings yet
- Infinitivo y GerundioDocument3 pagesInfinitivo y GerundioRichard VillónNo ratings yet
- Proyecto de TransferenciaDocument1 pageProyecto de TransferenciaRichard VillónNo ratings yet
- C03 P001 P010Document10 pagesC03 P001 P010何凱翔No ratings yet
- Tabla NormalDocument1 pageTabla NormalRichard VillónNo ratings yet