You might also like
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoFrom EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo ratings yet
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocFrom EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocNo ratings yet
- Conversor de 12V A 5VDocument13 pagesConversor de 12V A 5VrogerioNo ratings yet
- Projeto Fontes Chaveadas Apostila INVERSORDocument16 pagesProjeto Fontes Chaveadas Apostila INVERSORcharlesfp1No ratings yet
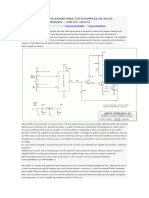
- Teste bicos injetores PIC 12F675Document6 pagesTeste bicos injetores PIC 12F675Elizangela BrandaoNo ratings yet
- Roteiro New Station e StationDocument22 pagesRoteiro New Station e StationLucas RianNo ratings yet
- Programação Em Assembly Para O Microcontrolador Pic12f Volume IFrom EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume IRating: 5 out of 5 stars5/5 (1)
- Regulador de Tensão LM317 - Pinagem, CALCULADORA e CircuitosDocument13 pagesRegulador de Tensão LM317 - Pinagem, CALCULADORA e CircuitosJoao JesusNo ratings yet
- Manual 297Document20 pagesManual 297renanslivaNo ratings yet
- PWM para controle de intensidade de LEDDocument15 pagesPWM para controle de intensidade de LEDEmily Souza da SilvaNo ratings yet
- Manutenção Solis 1.0Document45 pagesManutenção Solis 1.0Jean AlvesNo ratings yet
- Manual de instruções SAG 1006CDocument10 pagesManual de instruções SAG 1006CCarlosNo ratings yet
- No-Breaks, estabilizadores e bateriasDocument16 pagesNo-Breaks, estabilizadores e bateriasMariaaMarinaNo ratings yet
- Manual Sms Station IIDocument18 pagesManual Sms Station IIBruno SouzaNo ratings yet
- Como Usar Um Multímetro Digital Passo A Passo - 10 Principais FormasDocument10 pagesComo Usar Um Multímetro Digital Passo A Passo - 10 Principais FormasJulia DuqueNo ratings yet
- Ajuste da corrente de BIAS em amplificadores a válvulasDocument3 pagesAjuste da corrente de BIAS em amplificadores a válvulasbrunoNo ratings yet
- 220520201590157154aula2 SeriecomalimentacaosimetricaDocument9 pages220520201590157154aula2 SeriecomalimentacaosimetricaCelso CastroNo ratings yet
- Multi-Point Fertron Prod-11.Document28 pagesMulti-Point Fertron Prod-11.Mauro CésarNo ratings yet
- AF-Estabilizador de TensaoDocument6 pagesAF-Estabilizador de TensaoSidinei tomas100% (1)
- No-Break Ups BZ 1500va 8 Tomadas Bivolt Apc PDFDocument6 pagesNo-Break Ups BZ 1500va 8 Tomadas Bivolt Apc PDFFirenarrow-MM TwinflashNo ratings yet
- Acopladores a relé - Características e aplicaçõesDocument40 pagesAcopladores a relé - Características e aplicaçõesmateusT850No ratings yet
- Central 1024 RossiDocument1 pageCentral 1024 RossiguilhermebokNo ratings yet
- LR LM08 LF90Document9 pagesLR LM08 LF90Manoel Bernárdez VaccariNo ratings yet
- Diagrama em BlocosDocument15 pagesDiagrama em BlocosrobertojsouzaNo ratings yet
- Funções e especificações dos temporizadores digitais CLE, CLR, CLY, CLC e CLMDocument2 pagesFunções e especificações dos temporizadores digitais CLE, CLR, CLY, CLC e CLMrarison fortes100% (1)
- Manual Módulo Isolador Microsol MIE100Document8 pagesManual Módulo Isolador Microsol MIE100Socorro Costa50% (2)
- Torneira Automática SensorDocument6 pagesTorneira Automática SensorliderasasNo ratings yet
- COMTRAFO Seco Final PDFDocument2 pagesCOMTRAFO Seco Final PDFAdilson Leite ProençaNo ratings yet
- Manual TRR 2600SDocument10 pagesManual TRR 2600SLuis CarlosNo ratings yet
- Gravador de áudio com circuito integrado ISD 1420Document2 pagesGravador de áudio com circuito integrado ISD 1420Daniel ChavierNo ratings yet
- Guia - Rapido Inversor Df51Document57 pagesGuia - Rapido Inversor Df51AAllisson Grassi Farias0% (1)
- Apostila de treinamento e dicas de reparo em TVs LCDDocument40 pagesApostila de treinamento e dicas de reparo em TVs LCDMohamed Salah0% (1)
- BS 289 Disc Man MP3Document6 pagesBS 289 Disc Man MP3api-3697672No ratings yet
- SMDDocument18 pagesSMDLucio OliveiraNo ratings yet
- Geradores AT diversos fontesDocument25 pagesGeradores AT diversos fontes888khan7No ratings yet
- Treinamento DVD Sony DVP-NS325Document50 pagesTreinamento DVD Sony DVP-NS325Claudio JorgeNo ratings yet
- CERCA ELÉTRICA RESIDÊNCIAL MODELO: GCP 10.000 LIGHTDocument1 pageCERCA ELÉTRICA RESIDÊNCIAL MODELO: GCP 10.000 LIGHTCassio MelgacoNo ratings yet
- Esquema Dimmer para Ventilador - Uma PerguntaDocument3 pagesEsquema Dimmer para Ventilador - Uma PerguntaMauricioFadanelliNo ratings yet
- Fiat Palio 2012 alarme instalaçãoDocument1 pageFiat Palio 2012 alarme instalaçãoMarcos LobatoNo ratings yet
- Driver Motor Com Ponte H L298n - Controlando Motor DC - Portal VDSDocument32 pagesDriver Motor Com Ponte H L298n - Controlando Motor DC - Portal VDSKlew Cleudiney Theodoro BrandãoNo ratings yet
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoFrom EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo ratings yet
- Conversor para 220MHz (MODIFICADO)Document3 pagesConversor para 220MHz (MODIFICADO)Jorginho2000100% (1)
- Aol 1Document10 pagesAol 1eduardo mendesNo ratings yet
- AISLAMENTO ÓPTICODocument6 pagesAISLAMENTO ÓPTICOJoana Cristina Nieto100% (1)
- Instalação Bulk EpsonDocument11 pagesInstalação Bulk EpsonClebeson PolicarpoNo ratings yet
- Manual DVR Intelbras VD 4E 120CDocument114 pagesManual DVR Intelbras VD 4E 120CDigobucisNo ratings yet
- Teste automático de transistores, diodos e LEDsDocument2 pagesTeste automático de transistores, diodos e LEDsJackson FerreiraNo ratings yet
- Guia de Estudos Exame 98-365Document2 pagesGuia de Estudos Exame 98-365croswebe65No ratings yet
- Revisão 1.0 SI - Sistemas Inteligentes Eletrônicos Ltda. 21/05/2004Document60 pagesRevisão 1.0 SI - Sistemas Inteligentes Eletrônicos Ltda. 21/05/2004Weslley MarceloNo ratings yet
- Manual de Utilizacao de Leds e Fontes de AlimentacaoDocument26 pagesManual de Utilizacao de Leds e Fontes de AlimentacaoRodolfo Arantes GonçalvesNo ratings yet
- Aquecedor Solar Didatico UnespDocument8 pagesAquecedor Solar Didatico UnespVeronica GreenNo ratings yet
- Apostila Adobe Dreamweaver CS3Document99 pagesApostila Adobe Dreamweaver CS3daniellopes22No ratings yet
- Manutenção em fontes chaveadasDocument13 pagesManutenção em fontes chaveadasRonaldo Dias100% (1)
- Colecao Defeitos Resolvidos TV Monitor DVD SomDocument169 pagesColecao Defeitos Resolvidos TV Monitor DVD SomNelson Beluch100% (8)
- Como Funcionam As Fontes ChaveadasDocument8 pagesComo Funcionam As Fontes ChaveadasReinaldo Oliveira100% (2)
- Resumo de CapacitoresDocument1 pageResumo de CapacitoresWilliam Evangelista de Jesus0% (1)
- Tela - Manutenção de Notebooks, Localizando o Defeito PDFDocument4 pagesTela - Manutenção de Notebooks, Localizando o Defeito PDFsuporteplugadaoNo ratings yet
- Multisplit Carrier RPIDocument2 pagesMultisplit Carrier RPIandrebrtNo ratings yet
- Aula-17 ENE005Document58 pagesAula-17 ENE005Luan SantosNo ratings yet
- Apostila de Eletrnica Linear 1Document72 pagesApostila de Eletrnica Linear 1cleberdecoNo ratings yet
- Tabela Periódica Das Cores Dos ResistoresDocument9 pagesTabela Periódica Das Cores Dos ResistoresPatricia Oliveira de MeloNo ratings yet
- Eletrónica Instrumentação - Dicas de MediçõesDocument68 pagesEletrónica Instrumentação - Dicas de MediçõesCarlos Saraiva100% (1)
- Plano Técnico de Construção Do Gerador Quântico de Energia Elétrica Português-BRDocument31 pagesPlano Técnico de Construção Do Gerador Quântico de Energia Elétrica Português-BRH_Verde_AmareloNo ratings yet
- Capacitores e IndutoresDocument37 pagesCapacitores e IndutoresesdrasrnNo ratings yet
- Termossifão aplicado ao Separador Gás/Óleo/ÁguaDocument19 pagesTermossifão aplicado ao Separador Gás/Óleo/ÁguaFabricio De Jesus SilvaNo ratings yet
- Cat. Controlador JKL 2011Document12 pagesCat. Controlador JKL 2011Josemir TeixeiraNo ratings yet
- 3a Aula Sensores de Presença PDFDocument35 pages3a Aula Sensores de Presença PDFEdilene Auzani Flesch100% (1)
- Wireless Microphone FM TransmitterDocument2 pagesWireless Microphone FM TransmitterAnonymous t9tLb3WgNo ratings yet
- Apostila de OplatDocument59 pagesApostila de OplatTania Barbosa50% (2)
- Exercicios Fisica Eletrodinamica Circuitos Eletricos Malhas Multiplas GabaritoDocument8 pagesExercicios Fisica Eletrodinamica Circuitos Eletricos Malhas Multiplas GabaritoDiego_Marcos9No ratings yet
- Como funciona o PLLDocument6 pagesComo funciona o PLLMárcio CunhaNo ratings yet
- Circuitos RC e RL: conceitos e análise para excitações CC e CADocument18 pagesCircuitos RC e RL: conceitos e análise para excitações CC e CAHenry HcNo ratings yet
- Como funcionam os varicaps e suas aplicações em circuitos eletrônicosDocument10 pagesComo funcionam os varicaps e suas aplicações em circuitos eletrônicosItamar HoraNo ratings yet
- Análise de capacidade de transmissão de linha trifásica com reatância série de 50 ΩDocument6 pagesAnálise de capacidade de transmissão de linha trifásica com reatância série de 50 ΩjanluccasNo ratings yet
- Reforçador de corrente Totem-PoleDocument7 pagesReforçador de corrente Totem-PoleGabriela EstradaNo ratings yet
- Manual técnico lavadora Continental chave rotativaDocument39 pagesManual técnico lavadora Continental chave rotativaajaquilante88% (8)
- Diodo Shockley e GTODocument4 pagesDiodo Shockley e GTOkinyerNo ratings yet
- Estudo sobre capacitores e indutores: suas estruturas, propriedades e aplicaçõesDocument3 pagesEstudo sobre capacitores e indutores: suas estruturas, propriedades e aplicaçõesAllanRodrigoNo ratings yet
- Testa Cristais e Filtros CerâmicosDocument2 pagesTesta Cristais e Filtros CerâmicosFelipe PassosNo ratings yet
- Manualmotores PDFDocument59 pagesManualmotores PDFflavianopbNo ratings yet
- Conserto de fonte - Descrição completaDocument3 pagesConserto de fonte - Descrição completaNatanael Dos Santos SáNo ratings yet