You might also like
- Current Mode PWM Controller: Features DescriptionDocument9 pagesCurrent Mode PWM Controller: Features DescriptionJozo ĆurčićNo ratings yet
- Adc 0809Document12 pagesAdc 0809Carbon Nano TubeNo ratings yet
- How To Control HD44780 DisplayDocument5 pagesHow To Control HD44780 DisplayUngureanu BiankaNo ratings yet
- Led Display DriversDocument4 pagesLed Display DriverscybertechnicoNo ratings yet
- D D D D: Description/ordering InformationDocument24 pagesD D D D: Description/ordering InformationOmnhickNo ratings yet
- HD44780 CommandsDocument3 pagesHD44780 CommandsPhani ChakravarthiNo ratings yet
- 16x2 LCD Display Module GuideDocument5 pages16x2 LCD Display Module GuidesalmanNo ratings yet
- Stepper Motor PDFDocument9 pagesStepper Motor PDFΓιώργος ΔήμαςNo ratings yet
- ADC 0808 and 0809Document8 pagesADC 0808 and 0809Edwin YesaNo ratings yet
- Hello WorlvvvvvdDocument8 pagesHello WorlvvvvvdbrodryuNo ratings yet
- hd44780 1602A LCDDocument74 pageshd44780 1602A LCDJoão Paulo Versiani LadeiaNo ratings yet
- Datasheet 4017Document8 pagesDatasheet 4017rathalengNo ratings yet
- Uc 3842Document56 pagesUc 3842Miguel TorresNo ratings yet
- Datasheet Sensor FotoelectricoDocument3 pagesDatasheet Sensor FotoelectricoFederico CalcopietroNo ratings yet
- LCD TutorialDocument44 pagesLCD TutorialSahil Khan100% (1)
- Measurements & Electronic Instruments Laboratory Experiment ManualDocument3 pagesMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastNo ratings yet
- LCD 16X2 para PicsDocument21 pagesLCD 16X2 para Picsjuarez100% (1)
- HD44780 LCD Datasheet ExplainedDocument1 pageHD44780 LCD Datasheet ExplainedAnkit Daftery100% (4)
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- LCD Interfacing With Micro ControllersDocument4 pagesLCD Interfacing With Micro ControllersMijie Hj Hassan100% (1)
- ATmega328P - Instruction Set ManualDocument166 pagesATmega328P - Instruction Set ManualJesús Pérez MorenoNo ratings yet
- Analog To Digital Convertor Interface With 8051 MicrocontrollerDocument28 pagesAnalog To Digital Convertor Interface With 8051 MicrocontrollerbbbbgcbgbeNo ratings yet
- 4000 Series CMOS Logic ICsDocument10 pages4000 Series CMOS Logic ICsjaganmohanrs100% (1)
- 555 TimerDocument26 pages555 TimerEngr Wahab MarwatNo ratings yet
- 60MHz LCD Frequency CounterDocument3 pages60MHz LCD Frequency CounterHector Ledesma IIINo ratings yet
- Stepper ArduinoDocument6 pagesStepper ArduinoShahrim MohdNo ratings yet
- Kh56qm SeriesDocument2 pagesKh56qm SeriesPhan AnNo ratings yet
- LCD (Liquid Crystal Display)Document24 pagesLCD (Liquid Crystal Display)Giani Kumar100% (3)
- Noritake Display 7k A-Apn200 E21Document52 pagesNoritake Display 7k A-Apn200 E21Muhammad ArslanNo ratings yet
- List of 7400 Series Integrated Circuits PDFDocument22 pagesList of 7400 Series Integrated Circuits PDFduriiNo ratings yet
- ADC - Sound Shaper Tree - Manul ServicioDocument41 pagesADC - Sound Shaper Tree - Manul ServicioCarol Eduardo Apitz DíazNo ratings yet
- CD 4538Document10 pagesCD 4538Geraldo PereiraNo ratings yet
- Datasheet - 74LS283 - Somador Binário Completo de 4 BitsDocument7 pagesDatasheet - 74LS283 - Somador Binário Completo de 4 BitsLucas CarvalhoNo ratings yet
- Manual TB6560Document16 pagesManual TB6560erickmoraesNo ratings yet
- Handson Technology: I2C To LCD Interface BoardDocument6 pagesHandson Technology: I2C To LCD Interface BoardAlan Robson100% (1)
- TEX100 - EN (Vol 1)Document48 pagesTEX100 - EN (Vol 1)Harris RahmanaNo ratings yet
- SP431 Adjustable Precision RegulatorsDocument11 pagesSP431 Adjustable Precision Regulatorsagmnm1962No ratings yet
- Ecs Lecture5 Adc AhDocument45 pagesEcs Lecture5 Adc AhJai GaizinNo ratings yet
- List of 74xxx and 4xxx ICDocument15 pagesList of 74xxx and 4xxx ICTanvir Hussain92% (12)
- Voltage To Frequency Converter Folosind Ci 555 TimerDocument11 pagesVoltage To Frequency Converter Folosind Ci 555 TimerAl ZanoagaNo ratings yet
- Kenwood AG 203 Service ManualDocument18 pagesKenwood AG 203 Service ManualJose PimentaNo ratings yet
- AN2450-L6599 Application Note PDFDocument32 pagesAN2450-L6599 Application Note PDF양영주No ratings yet
- Fender Passport PD 250 SM (ET)Document36 pagesFender Passport PD 250 SM (ET)iceman55555No ratings yet
- Datasheet LD7523 PDFDocument18 pagesDatasheet LD7523 PDFIvica ConićNo ratings yet
- Resistor Transistor LogicDocument3 pagesResistor Transistor LogicRAJESHKUMAR SNo ratings yet
- Ed Laboratory Dsa8400Document2 pagesEd Laboratory Dsa8400Jose Cesar Souza GebaraNo ratings yet
- Service Manual: HR-S3902U, HR-S3912U, HR-S3912U, HR-S5902U, HR-S5912U, HR-S5912UDocument20 pagesService Manual: HR-S3902U, HR-S3912U, HR-S3912U, HR-S5902U, HR-S5912U, HR-S5912URenatoMaia0% (1)
- EEE Digital Assignment: Lamp Dimmer Circuit (Darlington Pair)Document6 pagesEEE Digital Assignment: Lamp Dimmer Circuit (Darlington Pair)bolbo naNo ratings yet
- WEG Ssw05 Soft Starter Manual Br0899.4668 Brochure EnglishDocument90 pagesWEG Ssw05 Soft Starter Manual Br0899.4668 Brochure EnglishJeovani DanielNo ratings yet
- PDFDocument202 pagesPDFAnand KalNo ratings yet
- PSRR and Measurement of PSRR in Class-D Audio Amplifiers and LDOs - An-135Document7 pagesPSRR and Measurement of PSRR in Class-D Audio Amplifiers and LDOs - An-135absalomlootNo ratings yet
- Viper22a Equivalent PDFDocument16 pagesViper22a Equivalent PDFXande Nane Silveira0% (1)
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- L297Document12 pagesL297wtn2013No ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
- LM 297Document12 pagesLM 297Monika JhaNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
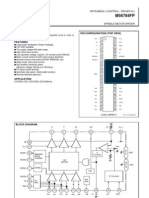
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- LS7290Document9 pagesLS7290Cidão GuimarãesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Variador Altivar 11 Telemecanique EspañolDocument212 pagesVariador Altivar 11 Telemecanique EspañolFelipe Andres Troncoso Reyes75% (4)
- CNC Usb ControllerDocument210 pagesCNC Usb ControllerDarween RezaNo ratings yet
- Cabezal Lase Fibra HP1 - 5 - EDocument2 pagesCabezal Lase Fibra HP1 - 5 - EOlger NavarroNo ratings yet
- LaserCAD ManualDocument65 pagesLaserCAD ManualOlger NavarroNo ratings yet
- Manual - SPCTrend With PLCSDocument11 pagesManual - SPCTrend With PLCSOlger NavarroNo ratings yet
- Editing Task CardsDocument13 pagesEditing Task CardsIuliana IgnatNo ratings yet
- IELTS READING UNIT 2 - Table/Flow-chart Completion QuestionsDocument6 pagesIELTS READING UNIT 2 - Table/Flow-chart Completion QuestionsDuy Phung DucNo ratings yet
- 101Document2 pages101gangeswar2750% (2)
- Measuring Pupil and Corneal SizeDocument1 pageMeasuring Pupil and Corneal SizeDanielle SangalangNo ratings yet
- AutoCAD System VariablesDocument92 pagesAutoCAD System VariablesganeshprabhuNo ratings yet
- ADCA Online Test Questions AnswersDocument8 pagesADCA Online Test Questions AnswersIňñøcêñt Bøý AmanNo ratings yet
- Splunk Quick Reference Guide PDFDocument6 pagesSplunk Quick Reference Guide PDFrodmsim100% (1)
- Pgadmin4-2 0Document258 pagesPgadmin4-2 0Gabriel100% (1)
- Dig, Dig, Dig (Oxford Reading Tree Stage 1+ Songbirds) (Donaldson Julia, Kirtley Clare)Document7 pagesDig, Dig, Dig (Oxford Reading Tree Stage 1+ Songbirds) (Donaldson Julia, Kirtley Clare)Andrej Vidovic100% (1)
- SSD Buying Guide ListDocument18 pagesSSD Buying Guide Listriski arrixki2No ratings yet
- Othello by William ShakespeareDocument5 pagesOthello by William ShakespearerajeshNo ratings yet
- American Journal of Humanities and Social Sciences Research (AJHSSR)Document2 pagesAmerican Journal of Humanities and Social Sciences Research (AJHSSR)M Manzoor MalikNo ratings yet
- Differentiated Learning With Seesaw HandoutDocument7 pagesDifferentiated Learning With Seesaw Handoutapi-468171582No ratings yet
- Plan Lectie, CL Ax-A, Word FormationDocument5 pagesPlan Lectie, CL Ax-A, Word FormationBogdan Zancu100% (1)
- How To Annotate A TextDocument15 pagesHow To Annotate A TextMarwaNo ratings yet
- HW9Document10 pagesHW9MarijaNo ratings yet
- Radical Islam in MontenegroDocument1 pageRadical Islam in MontenegroPavol KovacNo ratings yet
- First Seminar Presentation On Sing Unburied Sing by Jesmyn Ward - Section 24Document3 pagesFirst Seminar Presentation On Sing Unburied Sing by Jesmyn Ward - Section 24hjt7cdnzhjNo ratings yet
- Graco ACS ModuleDocument44 pagesGraco ACS ModuleRasel Setia Artdian SanjayaNo ratings yet
- Tremblay. Age Related Deficits in Speech ProductionDocument9 pagesTremblay. Age Related Deficits in Speech ProductionpaulyfonoNo ratings yet
- 2 Mathematics For Social Science-1-1Document58 pages2 Mathematics For Social Science-1-1ሀበሻ EntertainmentNo ratings yet
- Aotu Book 3Document216 pagesAotu Book 3Jiemalyn Asis GregorioNo ratings yet
- Simon Says Rhyming Strategy Write UpDocument2 pagesSimon Says Rhyming Strategy Write Upapi-610226157No ratings yet
- Search Engine Architecture 1Document23 pagesSearch Engine Architecture 1aadafullNo ratings yet
- How To Hear From GodDocument70 pagesHow To Hear From GodGyula TátraiNo ratings yet
- Taqi BatDocument103 pagesTaqi BatMohammad MehediNo ratings yet
- English for Medicine (Part TwoDocument178 pagesEnglish for Medicine (Part TwoShoxruza MusulmonovaNo ratings yet
- Module10-BigData Guide v1.0Document6 pagesModule10-BigData Guide v1.0srinubasaniNo ratings yet
- Statistics For Business Decision Making and Analysis 2nd Edition Stine Foster Test BankDocument5 pagesStatistics For Business Decision Making and Analysis 2nd Edition Stine Foster Test Bankeloise100% (19)
- Gr.8 CompleteDocument14 pagesGr.8 Completekathleen isaacNo ratings yet